轨道交通接触网故障检测与实证分析
2020-06-13李淑娟陈启香
李淑娟 陈启香
(1.淮南师范学院轨道交通信号与控制系 安徽淮南 232038;2.宝鸡文理学院电子电气工程学院 陕西宝鸡 721000)
目前,检修车定期排查接触网故障是高速铁路的主要故障检测方法,普遍存在效率低、检测不全面的问题[1]。所以,为保障轨道交通运输安全、提升轨道接触网故障检测效率,研究智能化接触网故障检测方法势在必行。本文从图像视觉角度解决轨道交通接触网故障检测问题,基于SVM分类器初步判断轨道交通接触网图像中目标构件的位置,然后基于仿生轮廓组合方法精准提取目标轮廓,以此判断轨道交通接触网是否处于故障状态。
一、基于图像视觉技术检测接触网故障
在轨道交通接触网上方安装高清相机,获取白天与夜间两种模式的接触网高清图像,为判断轨道交通接触网故障提供图像样本。首先基于中值滤波算法对原始采集的接触网图像进行滤波去噪,正确还原图像细节、降低图像模糊程度,为提取图像特征降低处理难度。
(一)基于中值滤波的接触网图像去噪算法。轨道交通接触网采集与传输过程中必然产生图像噪声,高清相机感受的光源差异、摄像头质量、周围环境条件均对图像采集质量产生影响;而图像传输过程的噪声主要由信道干扰导致,无论何种原因产生的图像噪声均严重降低图像质量、干扰图像提取与识别效果。相机拍摄的接触网图像中椒盐噪声与零均值噪声占比最多,这两种噪声的特点是将图像细节模糊化、降低图像像素水平,甚至丢失图像的关键性信息,中值滤波算法是处理该类型噪声的有效方法,以优化接触网故障识别效果为主要目的,将初始采集的接触网图像作为样本,采用中值滤波算法完成样本预处理。
1.中值滤波器设计。基于中值滤波算法去噪过程中,首先需设计中值滤波器,定义滤波窗口W大小为N×N,其中N是奇数,采用表示接触网二维图像的像素点,则中值滤波器表达式如下:

公式中,Med是一种运算方法,可精准排列窗口中全部数值顺序(基于由大至小规则);模板窗口用Z描述。
从本质上讲,重新排列滤波窗口中数值的顺序即为中值滤波算法的去噪思想,以2个数值大小作为中值滤波算法的基本滤波单元,对比滤波单元的大小后对其进行顺序排列。定义m×n表示二维滤波采样窗口,则存放滤波窗口等待处理数据的寄存器所需数量为m×n个,经过顺序对比后,排序得到滤波中值。
如何高效计算滤波中值是中值滤波算法优化运行速度的核心所在,本文基于比较编码设计比较器实现快速中值滤波,有效减少中值滤波器生成的时间开销,为后期处理提取图像特征、识别接触网故障节省时间。
2.基于比较编码的比较器设计。原始的三输入比较器如图1所示,其中,R为数据寄存器,在三输入比较器中,首先对比随机两个数据,将二者中较小值与其他数据比较,三个数据中的最小值由此产生,接下来对比得到中值与最大值,此为耗费三个周期时钟的排序。
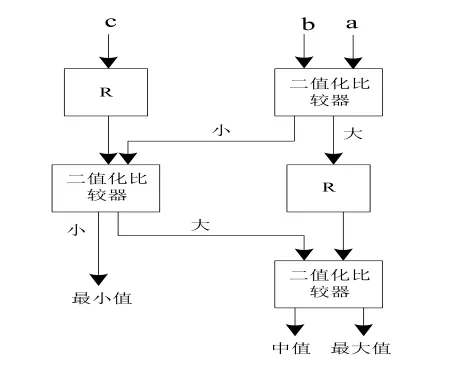
图1 三输入比较器
按照上述方法需要9个时钟周期才能完成3×3窗口中全部像素中值排序,为此,基于比较编码设计高性能的三输入比较器,见图2。

图2 基于比较编码的三输入比较器
结合图2分析基于比较编码的比较器运算步骤,同样随机选取三个数据,两两对比后对结果进行编码,该方法无需两个时钟周期即可直接输出数据,得到精准的排序结果只使用一个时钟,有效提升中值滤波算法的运行效率。
(二)图像中轨道交通接触网构件位置初步判断。本文联合使用HOG特征与SVM算法初步判断图像中接触网目标位置。HOG特征是计算机视觉研究方面表征物体检测的关键特征参量,在各领域物体检测中取得了优异的成绩[2]。由于图像梯度大部分存在于图像目标的边缘部分,所以采用梯度的方向密度表征图像的形状、外表等特征,此为HOG特征的基本原理。
本文判断图像接触网各构件位置时,将接触网位置判断问题视为图像二分类问题,接触网图像位置判断思路如下:首先,支持向量机分类的训练样本由HOG特征数据构成,其中正负样本分别为接触网图像特征、接触网之外背景特征[3];其次,SVM分类器训练符合精度标准后,输入测试样本即可获取准确的特征分类结果,在图像中准确判断接触网各构件的位置信息;最后,通过粒子群算法迭代优化SVM算法的主要参数,确保得到准确的接触网定位信息。
1.HOG特征提取。
提取HOG特征的流程如下详述:
Step1:实现彩色图像向灰度图像的过渡。
Step2:图像颜色空间的归一化在Gamma校正方法指导下完成,提高图像细节的对比效果,减少图像局部光照变化与阴影产生的画质干扰[4],一定程度上排除图像噪声的影响。
Step3:求取图像像素梯度、划分单元格。首先,计算图像各像素的梯度大小与方向两个参量,削弱光照干扰图像信息提取的程度;图像像素单元格划分要求为:16×16像素/单元。
Step4:统计不同单元的梯度分布情况,得到各单元的特征向量。
Step5:组成单元块。多个单元格构成一个单元块,HOG特征由单元块的特征向量组成,串联全部块的HOG特征构成图像的HOG特征数据样本。
2.SVM算法应用原理。SVM分类器在图像分类、故障识别中应用广泛,其在VC理论与结构风险最小化基础上以样本训练的方式转化成二次规划问题,实现样本的准确分类。
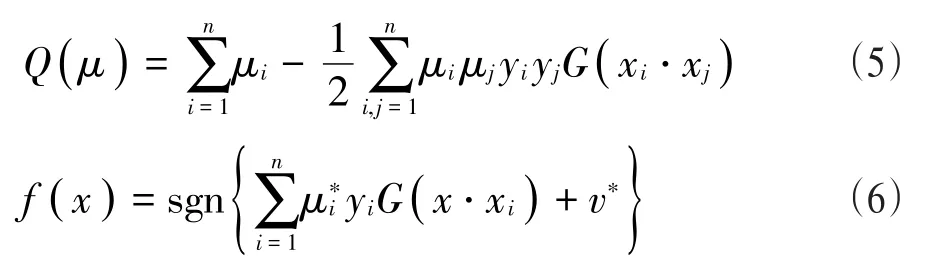
从两类样本中获取分类超平面是SVM算法的运算原理,定义HOG特征样本集用表示,其中,i=1,…,n,x∈Ov,类别符号描述为y,y∈{+1,-1},定义h(x)=η⋅x+v为分类超平面,其中超平面的法线用η∈Od表示,截距描述为v,“⋅”为内积运算。令训练样本中两类样本符合|h(x) |=1的目标,可通过归一化判别函数的方式实现,令分类间隔达到上限。以二次规划寻优对偶问题代替最优分类面求解问题是快速实现分类的核心依据,执行过程中,对拉格朗日函数求解偏微分,以拉格朗日函数为中介实现二者问题的转换。采用最优分类面无法解决两类点的精准分类问题时,需增加松弛因子与惩罚因子防止误判风险,掌控分类结果,则存在以下公式:

当存在0<ζ<1则证明样本点xi分类正确,反之,则分类错误。公式(2)和公式(3)结构风险目标函数与惩罚因子分别用Φ和C表示。C值越小,证明SVM分类器的分类精度越高、可行性越强,采用公式(4)描述这一规律:

其中,拉格朗日函数的乘子用μi表示,公式(4)可通过对η、v、μi求微分的方式得到。
引入高维空间,在此环境下实现核函数样本线性描述、线性分类,由此解决样本线性不可分产生的算法阻碍。方法如下:非线性变换特征映射ϑ,将原数据空间矢量映射到高维数据空间,即可实现支持向量机算法的要求。
支持向量机内积核函数选择存在差异,导致对应的SVM分类器性能均有所不同。径向基函数作为SVM算法的核函数的具体形式见公式(7):

分类器的核函数确定使用径向基函数,组合形成径向基分类器,能够有效排除外部干扰[5],实现高精度分类。
3.采用粒子群优化算法优化SVM分类器参数。特征分类过程中,C、δ是干扰SVM分类器性能的主要参数,为此,采用粒子群算法对这两个参数进行迭代优化,提升SVM分类器识别图像中接触网HOG特征的精度、缩短定位时间。
粒子群优化算法智能水平突出,由鸟群觅食协作行为、信息交互的行为中获得启示,PSO算法以模仿鸟类觅食行为演化而成[6]。粒子群算法中定义i表示目标粒子,那么粒子i的位置和飞行速度表达式为:Mi=(mi1,mi2,…,min),Ri=(ri1,ri2,…,rin),Pi=(pi1,pi2,…,pin)是智能优化过程中粒子i到达的最佳位置。最小化目标函数f(X),获取粒子群遍历最优位置如下:

公式(9)、公式(10)为粒子群算法进化方程:

式(9)中,j和t为粒子的维数与代数;惯性因子为ω1;ε1和ε2为加速因子,q1和q2是随机数值,二者不存在关联。算法运行期间,在加速因子的合理设置下得到粒子向最优位置运动的状态。
利用粒子群算法迭代优化SVM分类器,得到耗时短、精准的HOG特征分类结果,实现轨道交通接触网各结构的初步定位。
(三)基于仿生轮廓组合方法精准提取接触网轮廓。在上述方法初步确定的接触网位置的基础上,基于仿生轮廓组合方法精准提取接触网构件轮廓,从轮廓上判断接触网是否处于异常故障状态。
仿生轮廓组合方法提取物体轮廓的原理描述如下:生物视觉与心理物理学研究均显示:人类观察外部环境时明显受边缘轮廓分组机制的影响[7]。基于该原理,人们可以正确方式将局部的边界元素排列成完整的全局轮廓。由于轮廓排列体系中存在连续性特征,该特征极为关键,延长若干边缘片断端点即可形成一条相连接的光滑曲线,则大大增加边缘从属于目标轮廓的几率。人眼视觉也存在以下情况:倾向于观察长度较长的轮廓事物,漏掉长度较小的边缘片断[8]。基于人眼生物视觉特征,本文设计了仿生轮廓组合方法,即:若候选边缘邻域中包含与其共线的边缘,则此边缘属于轮廓边缘的概率极大增加;且随着候选边缘邻域中共线边缘数量增加、当前边缘在目标轮廓边缘中的概率随之增加[9]。
因此边缘与轮廓存在以下关系:采用h表示候选边缘集合中边缘,采用hi表示邻域内剩余边缘,这些边缘的边缘方向角度分别用φ和φi表示。当前边缘属于主轮廓的概率取决于邻域内边缘与当前边缘方向一致的数量,数量越大、属于主轮廓的几率越大。采用公式(11)描述边缘共线概率的定义:

公式中,c为边缘共线的概率,邻域边缘数量用n表示,邻域中边缘数量值上限为Nmax,此时边缘与邻域内边缘的方向角分别用φ和φi表示。由人眼视觉观察规律可知,长度越长的边缘更容易得到人眼关注,由此得到:边缘长度与其成为轮廓的概率成正比。采用ce表示长度概率,形式如下:

公式中,此时边缘长度、全部候选边缘长度最大值分别用e、emax表示,公式(13)则为以条边缘的仿生轮廓计算概率:

公式中,设置参数λ,取值在区间(0,1)内,作用是协调长度概率与共线概率之间的权重占比。基于上述关于仿生轮廓概率呈现图3所示的边缘提取示意图,其中,图3(a)中边缘h独立存在,且长度较小,不会成为图像的轮廓边缘;而图3(b)中,边缘h与边缘a和d可组成一个连续的长边缘,增大其从属于轮廓边缘的组合概率。

图3 边缘轮廓示例
最后,算法基于概率阈值剔除边缘分类中的纹理边缘,方法见公式(14):

其中,c2表示概率阈值,取值为0.92;b(e)表示剩余的边缘集合,概率阈值低于0.92的边缘均被剔除。余下的边缘即形成图像中接触网构件的轮廓,得到精准的轮廓提取结果。
二、实证分析
以某高铁车站为例,展开轨道交通接触网故障识别实证分析测试。图像采集装置:在轨道接触网立柱两侧安装高清相机,由于夜间工作人员较少,接触网发生故障不能及时发现,所以夜间接触网故障识别尤为重要。安装的高清相机能够在夜间拍摄高清图像,相机拍摄的轨道接触网图像定期传输至监控端,用于检测接触网是否存在故障。图4为轨道交通接触网故障测试现场图。

图4 接触网故障测试现场
应用本文方法检测接触网故障时,1.4、1.6是粒子群算法的两个加速因子值,30为粒子群中粒子数量,惯性因子为0.7,迭代550次终止运算。以此参数优化SVM分类器,降低轨道接触网故障检测误差。
(一)轨道接触网故障检测结果。本次测试采集夜间接触网中绝缘子与接触线的图像,用于接触网故障检测,如图5所示。

图5 采集的轨道接触网原始图像
图6为本文方法对绝缘子与接触线的初步定位结果。

图6 初步定位结果
由图可知,本文方法能够判断出绝缘子的大概位置,与背景元素精准分离,但是没有具体描绘出绝缘子的轮廓;同时,本文方法可大概提取出接触线的初步位置,由于接触线结构简单,所以对其定位相对精准,接近最终的识别结果。在此基础上需深入进行目标轮廓精准定位,本文方法对轨道接触网绝缘子与接触线进行轮廓精准提取的结果如图7所示。

图7 故障识别结果
由该图可知,本文方法可精准得到绝缘子的轮廓图,识别出绝缘子中的缺陷,并及时向监控中心发送故障预警,提示工作人员进行检修。同时,本文方法对接触线的检测结果为不存在缺损,与实际情况一致。
(二)本文方法故障检测性能测试。为排除本文方法检测接触网故障的偶然性,选取大量轨道交通接触网图像作为实验样本,采用本文方法进行故障检测,本文方法的检测结果如表1所示。

表1 本文方法的轨道接触网故障检测性能
分析表1可知,测试样本数量增加至50幅图像时,本文方法检测接触网各部位故障的准确度不小于95%,最高用时为25.4s,检测精准度与效率较高。由于接触线结构简单,花费的时间最少,而绝缘子与定位线夹结构相对复杂,使用的检测用时相对较长。由此可知,本文方法能够精准检测轨道交通接触网的故障情况,可行性强。
本文方法检测轨道交通接触网故障精度高,原因在于获取图像初步位置时,在于粒子群优化算法对SVM特征分类器进行优化,获得了较优的图像特征分类效果,为最终识别图像目标轮廓提供了有利条件。
三、结语
轨道交通接触网是保障列车运行供电的重要组成部分,需及时发现接触网的故障,保障列车运行安全。针对人工巡检轨道接触网效率低、精度差的问题,本文从图像识别角度提出一种检测接触网故障的智能化方法。通过拍摄接触网各结构的高清图像,基于图像目标定位与轮廓提取技术获取接触网构件的精准轮廓,进而判断构件是否发生异常故障。本文方法检测故障的准确度率高,主要原因在于:粒子群算法优化了SVM特征分类器的C、δ参数,避免了SVM分类器盲目分类特征的风险,提升图像中接触网构件定位的精度。
本文提出的轨道交通接触网故障检测方法在实证分析中取得了较优的检测效果,应用前景广阔,为轨道运输巡检人员、监控部门提供了故障预警依据,在一定程度上提升列车运行的稳定性。
