模糊控制技术在静脉输液速度控制中的应用效果研究
2020-06-11崔宇琛郭建军
郭 威,崔宇琛,郭建军
(1.山西医科大学,山西030001;2.吉林大学口腔医学院;3.山西医科大学第一医院)
静脉输液是常见的临床治疗手段[1],科学、合理的输液速度已成为安全用药的前提[2]。目前,临床上多采用目测法判断输液速度,其精确性较差;同时,由于输液过程中液体滴速会受诸多不确定因素影响,使得输液速度难以保持稳定[3-7]。不当的液体输注速度,轻者会给病人造成不适,影响药物治疗效果,重者会造成医疗事故,严重影响医患关系[8-9]。模糊控制技术作为一种常用的人工智能方法,在非线性、时变等复杂系统的过程控制方面被广泛应用[10-17]。输液速度与影响因素间存在不确定性,二者间关系具有非线性特点[18],将模糊控制理论引入液体输注速度控制中,有利于实现对输液过程中因不可控因素导致的速度改变的自动调整。现报道如下。
1 原理与方法
1.1 静脉输液速度模糊控制模型原理 静脉输液速度控制模型的基本思想是模仿医护人员对静脉输液过程的控制,把临床静脉输液护理中护士长期积累的经验,借助模糊数学的方法,表示成一系列控制规则,经数学处理,生成模糊规则控制器。计算机将医护人员预先设定的液体输注速度值与液体输注过程中检测到的实际液体输注速度值间的误差e 及误差变化率ec 作为输入量,通过模糊控制器对液体输注速度进行控制。e 及ec 计算公式分别见公式(1)和公式(2):

(1)式中,O(t)表示t 时刻系统预先设定的液体输注速度,可由医护人员根据病人年龄、病情及药物特性事先设定;D(t)表示t 时刻液体输注的实际速度,可由红外线传感器实时采集[19-20]。(2)式中,e(t)和e(t-1)分别表示t 时刻和t-1 时刻液体输注速度的误差值。
将e 及ec 经整个控制器模糊化,转化为输入量的模糊语言值。在此基础上,依据模糊控制规则,经模糊算法器进行模糊推理,得到模糊控制量U。最后经模糊决策器决策,得到精确的控制量u,用于控制执行机构(步进电机)对受控对象输液器皮管的松紧度的控制,从而可达到对液体输注速度调节的目的。
1.2 输液速度模糊控制器的设计 控制模型采用双输入/单输出结构,输入量为e 和ec,输出量为模糊控制量u。整个控制器包括模糊量化器、模糊算法器及模糊决策器三部分[21]。
1.2.1 模糊量化器 从医学治疗角度考虑,液体输注速度应为每分钟6~125 滴,一般设置为每分钟60~80滴。当液体停止输注时,可发生回血。甘露醇输注速度可为每分钟125 滴[22]。因此,将输入量e 和ec 的基本论域确定为-125~125,输出量u 基本论域确定为-3~3,量化论域均为-6~6。量化因子分别为:k1=0.048,k2=0.06,k3=2。E、EC 和U 分别为e、ec和u 的语言变量,取值划分为PB、PM、PS、Z、NS、NM、NB,依次表示“正大”“正中”“正小”“零”“负小”“负中”和“负大”。各语言变量的隶属度函数见图1 和图2,对应的模糊赋值表见表1 和表2。
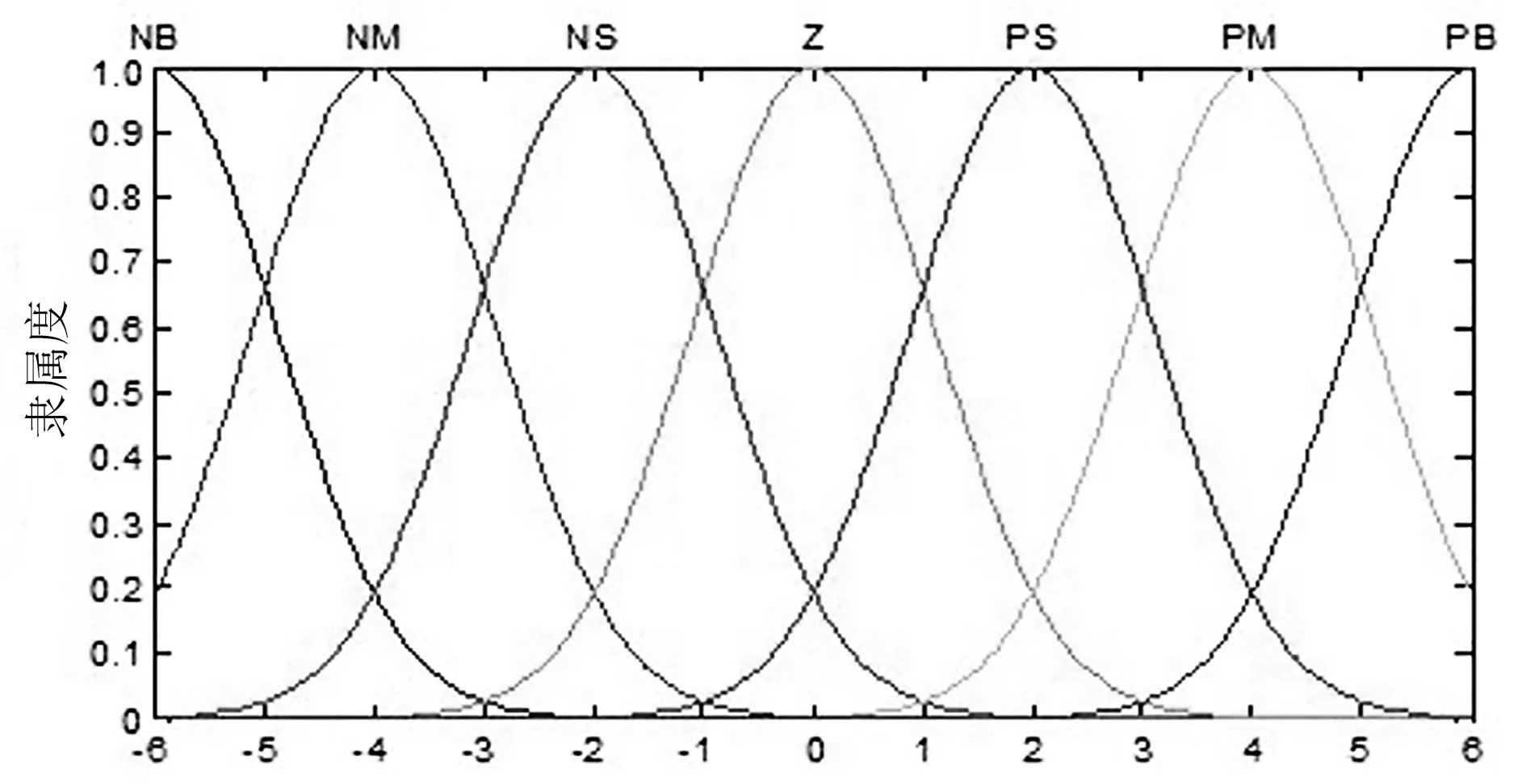
图1 E 和EC 的隶属函数
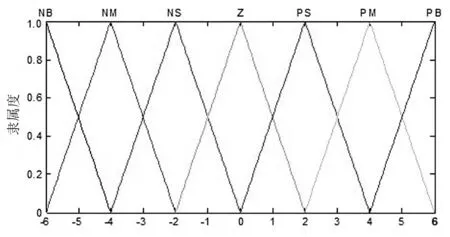
图2 U 的隶属函数
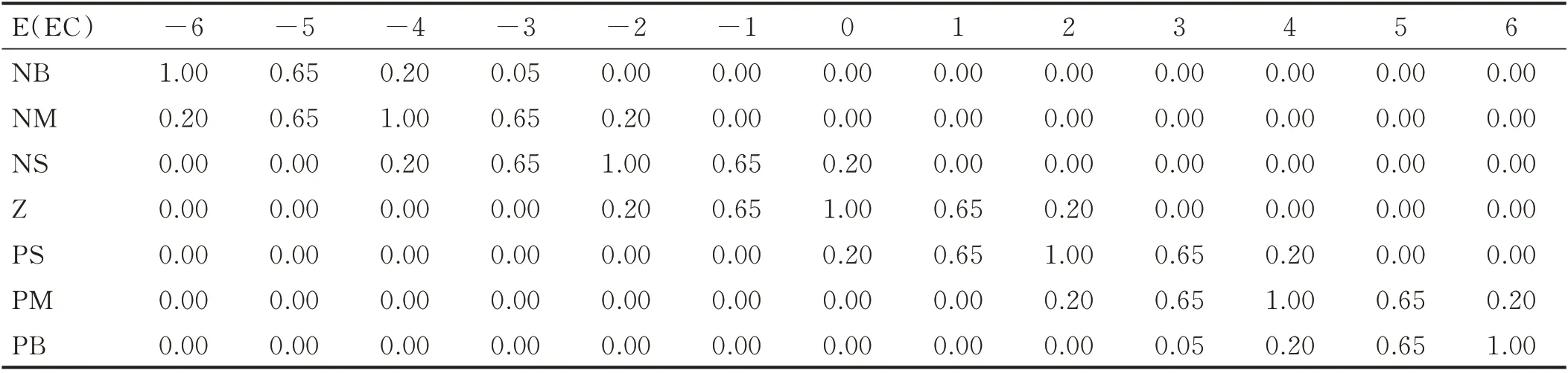
表1 输入量E 和EC 分级模糊化表
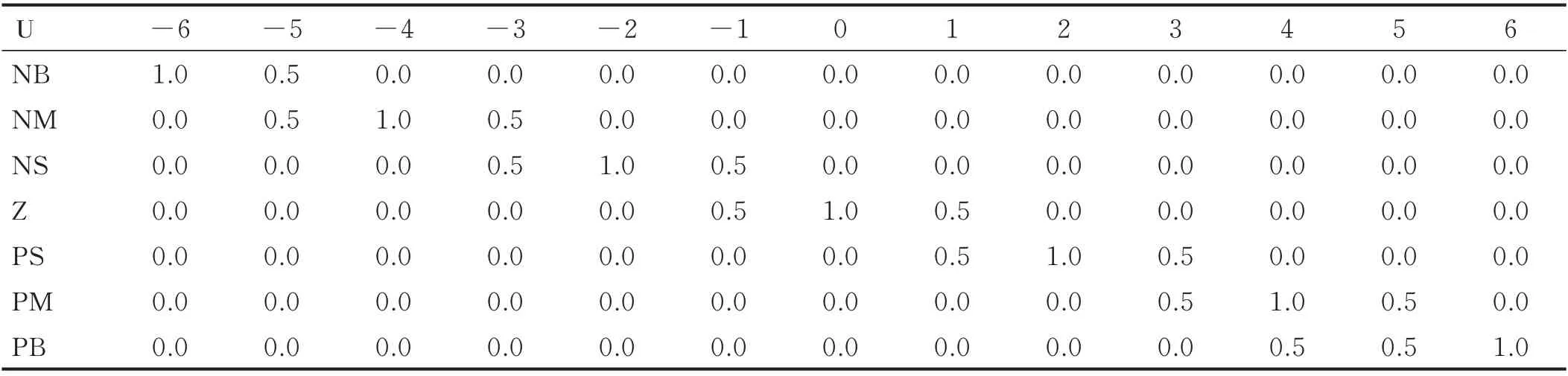
表2 输出量U 的分级模糊化表
1.2.2 模糊算法器的设计
1.2.2.1 生成模糊控制规则 静脉输液速度控制规则可以反映医护专家在静脉输液速度控制过程中的临床思维。当输液速度误差E 为“负大”或“正大”且误差变化率呈EC 无减小趋势时,为尽快消除误差,需加大控制器控制力度,此时控制量U 应取“正大”或“负大”,使步进电机以最大的转角转动,压紧输液橡皮管;当误差变化率有减小趋势时,应视误差变化率大小,采取中度、微度或者不予干预的控制策略,即控制量U 取“正中”“正小”“零”“负小”“负中”。当误差为“负中”或“正中”时,应尽快消除误差,此时采取的策略基本与误差为“负大”或“正大”时相同。当误差为“负小”或“正小”时,控制量不宜太大,应选取适度的控制策略[23]。当误差和误差变化率均为“零”时,不需控制。其if-then 语句书写形式如下:
1)IF E=NB and EC=NB THEN U=PB
2)IF E=NB and EC=NM THEN U=PB
3)IF E=NB and EC=NS THEN U=PB
4)IF E=NB and EC=Z THEN U=PB
5)IF E=NB and EC=PS THEN U=PM
6)IF E=NB and EC=PM THEN U=PS⋮
49)IF E=PB and EC=PB THEN U=NB
以上形成的49 条控制规则见表3。
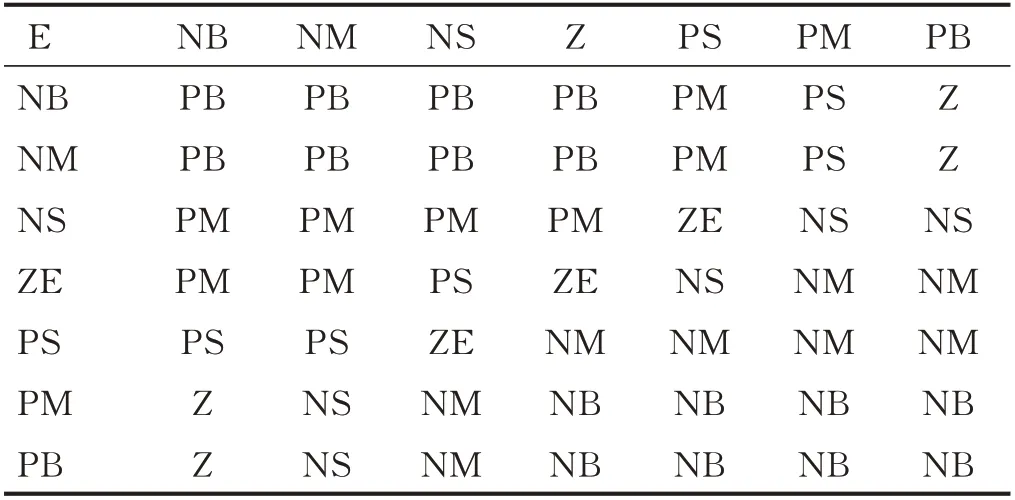
表3 模糊控制规则表
1.2.2.2 模糊推理规则的合成 将以上控制语句用模糊关系表示为公式(3):
对以上模糊关系,进行模糊关系合成,计算获得对应的控制量U,模糊控制算法见公式(4):

1.2.3 模糊决策器的设计 由于受控对象只能接受确定的控制量,模糊算法器输出的模糊控制量U须经模糊决策器转化为确定的控制量,进而对受控对象进行精确控制。模糊决策器一般分为最大隶属度原则转换器、重心法、取上位数转换器3 种类型[24]。本研究使用重心法,计算公式如下所示:

1.3 应用 在MATLAB 环境下,利用FIS 编辑器进行模糊控制器设计,任意给出1 个输入值,如e=-4,ec=2,模糊控制器输出结果U=3.25。利用simulink建立液体输注速度控制器仿真模型以验证模型控制效果。
2 结果
给定液体输注速度,观察模糊控制器对输液速度的控制效果,结果见表4。
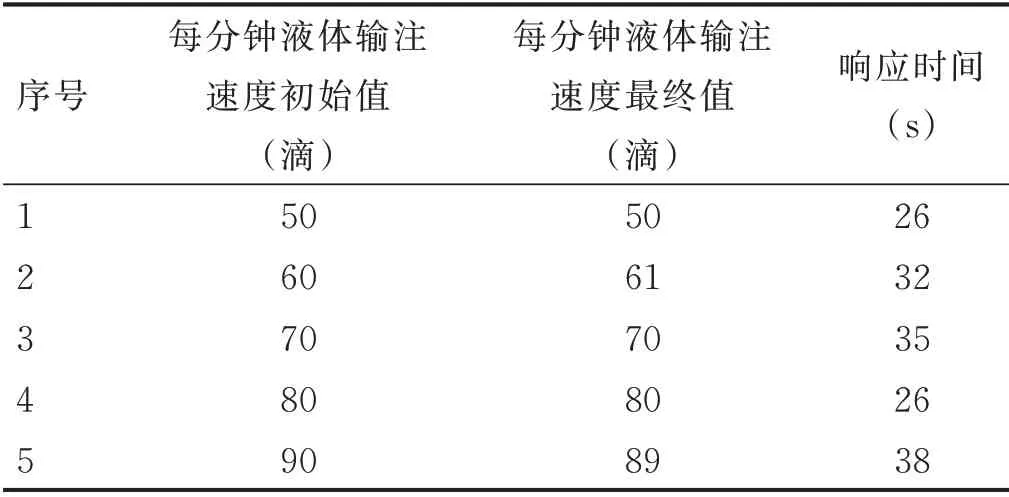
表4 模糊控制器控制结果
3 讨论
表4 结果显示:采用模糊控制器对输液速度进行控制,预先给定不同输入速度,控制器均能在较短时间内给出响应,且每分钟液体输注速度最终值与每分钟液体输注速度初始值相差较小。说明本研究设计的模糊控制器在速度控制方面实时性较强,准确度较高,有利于实现临床护理输液过程的智能控制。本研究的5次测试中,第2 次和第5 次测试每分钟液体输注速度最终值与每分钟液体输注速度初始值不完全一致,可能是由于临床经验样本数据量不够大,建立在经验基础上的模糊控制规则不够精准。提示在今后的工作中还需进一步扩大样本量,保证数据结果的科学性。同时,在实践中还须不断调整和优化控制规则,以提高其准确度。
随着人工智能发展,利用控制技术对静脉输液速度实时控制已成为实现科学化护理的重要手段。相较于传统目测法手动调节输液速度,基于模糊控制的静脉输液速度控制最大优势在于实现输液过程的自动控制,其不仅有利于减小输液速度调节误差,还有利于减轻护理工作压力,促进医院护理信息化水平建设。