基于滚动优化的地铁列车节能运行协同控制方法
2020-06-10李佳杰周雨鹤冯旭杰
柏 赟,袁 博,李佳杰,周雨鹤,冯旭杰
(1.北京交通大学 综合交通运输大数据应用技术交通运输行业重点实验室,北京 100044;2.交通运输部科学研究院 城市交通与轨道交通研究中心,北京 100029)
地铁因其间隔小、运量大、准点性高等优点,成为城市公共交通系统中重要的组成部分。截至2019年底,我国地铁线路运营总里程达5 187 km。地铁运营里程增加的同时带来了系统能耗的持续增长。对于地铁系统,列车运行能耗一般占系统总能耗一半以上[1],如何减少列车运行能耗成为了近些年研究的热点。
自HOWLETT[2]提出最大牵引—巡航—惰行—最大制动的列车4阶段操纵策略后,国内外学者针对列车节能操纵问题进行了广泛的研究。目前,对于地铁系统单列车节能操纵的研究[3-6]较为成熟,集中于优化列车站间操纵工况序列,以降低列车运行能耗。传统的单列车节能操纵策略虽然可以使其自身牵引能耗最少,但由于没有考虑再生能利用,并不能保证系统净能耗(牵引能耗减去利用的再生能)最低。因此,如何提高再生能的利用逐渐成为研究热点,主要可分为列车时刻表优化和列车协同控制优化。
列车时刻表优化可以从系统整体的角度提高再生能利用率,降低净能耗。这些研究[7-9]一般通过优化列车的到发时刻、发车间隔以及站间运行冗余时分分配,使不同列车牵引和制动工况重叠时间最大化,以提高再生能的利用效果。在此基础上,步兵[10]还考虑了列车站间运行各工况持续时间,实现时刻表和列车控制的统一规划;LI[11]同样研究了时刻表和列车控制的综合优化问题。尽管如此,列车再生能的利用仍集中于离线优化层面,其理论节能效果会受到列车实际运行过程中普遍存在的偏差和扰动影响。
还有一些学者从列车协同控制的角度入手,研究通过协调多列车运行过程,增加列车牵引和制动的重叠时间,以提高再生能利用率。荀径[12]考虑牵引供电系统建立了列车节能驾驶模型,通过检测供电网压变化提高列车车速,以利用再生能,实现列车节能运行;LIU[13]通过离线调整列车工况,使2 列列车牵引和制动过程重合以利用再生能;SUN[14]基于解析法对再生能进行最优分配,并通过改变列车工况序列利用分配的再生能;曹耘文[15]利用预测控制思想,研究了地铁列车协同控制在线优化问题。上述研究多从整体的角度出发,但是决策变量的增加降低了问题的求解效率,难以满足在线优化要求。另一方面,列车重量在车站发生改变或其他扰动会影响上述优化模型的可实施性和节能效果。
鉴于地铁系统复杂性和时变性特点,本文首先根据车—车通信CBTC (Communication Based Train Control)系统特点,提出1 种基于滚动优化思想的列车协同运行控制方法;然后,以停站列车在下一站间运行的操纵方案为对象建立在线优化模型,通过调整列车运行工况序列及转换时机,减小系统净能耗。
1 地铁列车运行控制
1.1 基于滚动优化的列控方法
基于车—车通信的CBTC 系统可实现不同列车间实时的信息传输,为列车操纵方案的在线滚动优化和列车节能运行协同控制提供了基础。
本文提出的滚动优化控制基本思路为:当任一列车停站时,考虑列车的实时重量和车—车通信接收的同一供电分区内其它列车在其当前运行站间的操纵方案,以净能耗最小为目标,优化停站列车在下一站间运行的操纵方案。列车出站后按照该操纵方案运行并将此方案传输至其它列车供后续滚动优化使用。随时间推进,任一列车停站时均重复上述过程。
以同一供电分区内j,k,l这3 列车同向运行为例,如图1所示。T时刻,列车k停站,根据车—车通信接收的列车j在当前运行站间4 和列车l在当前运行站间1的操纵方案,并考虑实时列车重量和站间3 的线路条件,生成列车k在站间3 运行净能耗最小的操纵方案。当T+Δt时刻,列车l停站,根据车—车通信接收的列车j在当前运行站间4 和列车k在当前运行站间3 的操纵方案,并考虑实时列车重量和站间2 的线路条件,生成列车l在站间2运行净能耗最小的操纵方案。随着时间的推进,每列车每次停站时计算其在下1个站间运行的操纵方案,整体实现基于每列车的滚动优化计算过程,最终减小系统净能耗。

图1 基于滚动优化的列车控制过程示意图
1.2 列车操纵策略优化
在基于滚动优化的列控方法中,需对每列停站列车在下一站间运行的操纵方案进行优化,达到节能目的。既有研究表明,在没有长大下坡的站间,地铁列车节能操纵可以采用4阶段策略,即最大牵引—巡航—惰行—最大制动,如图2(a)所示。当给定列车牵引末速度vcr和惰行初始位置xco以及站间运行时分t,即可确定整个速度曲线。然而,当站间包含长大下坡时,列车可能在下坡道上处于巡航阶段,此时列车会采取制动工况(即下坡重力大于基本阻力,惰行将加速)以维持巡航速度运行,造成不必要的能量损失。vbr表示制动初速度。
文献[16]对4 阶段操纵策略进行改进,提出了1 种适用于长大下坡道线路的列车节能操纵方法。通过优化列车牵引末速度和提前结束巡航过程,使列车在长大下坡道上采用惰行节能,但其列车节能操纵策略并没有考虑列车间再生能的利用情况。如图2(b)所示,当列车k制动阶段发生于列车j巡航阶段,则列车k产生的再生能并不能够被充分利用,导致大量再生能浪费。因此,上述列车操纵方法在再生能利用方面存在一定的局限。

图2 列车4阶段操纵策略示意图
对此,本文提出了1 种更加全面和普适的列车操纵方法。首先,根据只要列车在坡道上惰行能够加速且不超过限速就采用惰行工况,否则采用巡航工况的原则,在已知出站牵引速度曲线和进站前惰行—制动速度曲线情况下,二者之间的途中运行速度曲线即可根据线路条件和列车当前位置的车速确定,如图3(a)所示。这样可充分利用坡道势能为列车提速,减小列车运行牵引能耗。此外,为了提高再生能的利用率,在列车运行工况序列中允许加入2次牵引过程,如图3(b)所示。以此配合其它列车的制动过程,充分利用制动列车产生的再生能,减小系统净能耗。
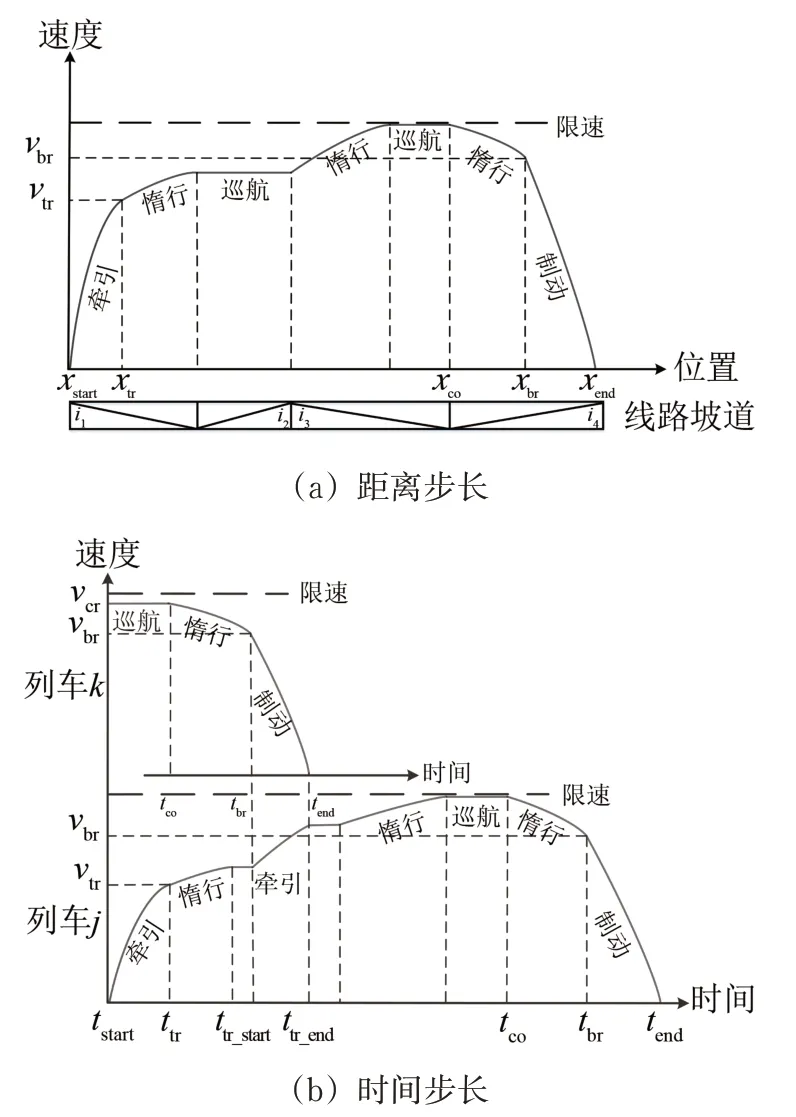
图3 列车4阶段改进操纵方法示意图
采用上述列车操纵方法,当给定列车牵引末速度vtr、进站制动前惰行的起始位置xco、列车2次牵引的起止时刻ttr_start和ttr_end以及站间运行时分t,即可确定列车站间运行的速度曲线。由于列车运行时分由时刻表给出,且列车2 次牵引起止时刻可根据制动列车制动起止时刻tbr和tend以及相应的列车操纵规则确定。因此,采用本文提出的列车操纵方法,决策变量仅为列车出站牵引末速度和进站制动前惰行的起始位置,即列车操纵方案φ(vtr,xco)。
2 数学模型
2.1 问题边界及假设
本文研究的问题和数学模型基于以下的假设条件:不考虑线路储能装置的使用,再生能无法被利用时被保护电阻消耗。通过对线路坡道进行等效处理,将列车视为单质点进行计算[17]。列车遵循以下操纵规则:考虑到地铁站间距较短且限速较低,每列车至多采取1 次2 次牵引过程;为尽可能多利用再生能,当存在多车制动且时间不重合时,牵引列车与可提供再生能最多的1列制动列车相匹配。
2.2 列车站间运行工况
列车在站间运行的牵引出站和制动进站过程相对固定,而途中运行阶段可以有多种不同工况序列组合。采用本文提出的列车操纵方法,列车在途中的运行工况根据列车在当前位置的速度、线路坡度以及限速确定。具体过程为:列车在途中运行阶段,根据当前位置的列车速度v(s)、下一运行步长s+Δs内线路坡度i(s+Δs)和线路限速Vlimit(s+Δs),计算列车运行受到的阻力Fr[v(s),s+Δs],再根据式(1)确定列车在下一运行步长s+Δs内的运行工况o(s+Δs)。
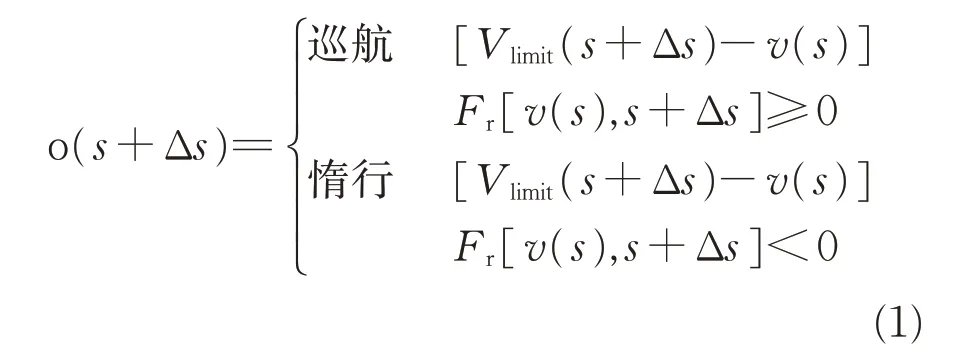
其中,

式中:a,b,c为列车基本阻力参数;M为列车质量;g为重力加速度。
由式(1)和式(2)确定出站牵引和制动进站之外阶段的列车运行工况,使列车在坡道上只要惰行能够加速且不超过线路限速就采用惰行工况,否则采用巡航工况。这样可充分利用线路坡道势能为列车提速,减小牵引能耗,达到节能效果。列车出站牵引结束后,不断重复上述判断过程,可确定列车途中运行工况序列,直至列车最终惰行—制动进站停车。若列车途中进行了2 次牵引过程,在2次牵引起止时刻确定的情况下,同样可利用上述方法确定列车的运行工况。
2.3 目标函数
列车站间运行控制的目的是减小净能耗,目标函数可表示为

式中:Ej为列车在下一站间运行净能耗;tstart和tend分别为决策列车j的出站时刻和到站时刻;ej(t)和ek(t)分别为t时刻决策列车j的牵引功率和与之相配合的制动列车k的制动功率。
ej(t)和ek(t)的计算公式为

式中:FT(v)和FB(v)分别为列车在速度为v时的牵引力和制动力;n为在线列车数量;Pa为列车辅助设备用电功率;ɑ和β为0-1变量。
ɑ和β的取值为

式中:vr是列车空气制动转电制动的临界速度。
2.4 约束条件
列车站间运行状态变量遵循运动方程为

列车站间运行需要满足一定的边界条件约束和再生能利用规则约束,为

式中:S为站间距离;ε为站间运行时分误差值精度;为了使列车在制动时具有较低的速度,以保证有效制动减速进站,设置μ为小于1 的比例系数,表示列车制动前一段时间内不实施2 次牵引,本文取值为0.2。
此外,为了满足乘客舒适性和保证列车行车安全,需要对列车最大加减速度和运行速度进行约束,为

式中:amax和bmax分别为列车最大加速度和最大减速度。
3 仿真流程及求解算法
列车协同运行控制仿真流程如图4所示。首先,输入时刻表信息后计算出列车的发车次序。接着,按照求得的发车次序,依次计算列车站间运行操纵方案。计算时会调用其它列车运行信息的数据库并判断是否可以采用2 次牵引过程利用再生能;然后,对列车操纵方案和运行信息进行储存和更新,直至所有列车操纵方案求解完毕;最后,根据所有列车的运行信息求解系统总能耗。

图4 列车协同运行控制仿真流程图
图4中,列车节能操纵方案的求解本质上是确定使列车在站间运行能耗最小的速度曲线,属于非线性最优化问题,可考虑采用Brute Force 算法求解。Brute Force 算法作为1 种暴力求解方法,将所有可行解列举出来,从中选择最优方案,理论上可以求得问题最优解,但是由于算法需要遍历所有可行解,计算速度会大幅下降。由于列车节能操纵在线优化需要具有较高的求解效率,本文对Brute Force 算法进行改进,采用2 层嵌套搜索的思想,有效减小搜索空间,在保证解质量的前提下大幅提高算法求解效率,满足在线计算的要求。
改进Brute Force 的步骤如下。
Step1:算法初始化。输入线路信息、列车参数、区间限速Vlimit、初始搜索速度v、站间运行时分t、运行时分精度ε、上层和下层搜索的分段数P和Q。
Step2:令v=v+Δv,Δv为速度步长。
Step3:以v为牵引末速度,求解列车以最大牵引—巡航—最大制动模式运行的运行时分tv。
Step4:判断|t-tv|<ε是否成立。若成立,令最小牵引末速度vtr=v,记录操纵方案φ(vtr),并计算其能耗Etr,转步骤5;若不成立,转Step2。
Step5:令vtr=vtr+Δv,Δv为速度步长。
Step6:上层搜索。以vtr为牵引末速度计算牵引结束位置xtr,将牵引结束位置xtr至终点位置xend分为P段,得P+1个分段点xp。其中p=1,2,...,P+1。以xp为惰行起始位置,计算操纵方案φp(vtr,xp)的运行时分tp。
Step7:判断|t-tp|<ε是否成立。若成立,记录操纵方案φ(vtr,xco)=φp(vtr,xp),转Step9;若不成立,转Step8。
Step8:下层搜索。确定xp和xp+1使tp<t<tp+1或tp+1<t<tp成立。将位置xp至位置xp+1分为Q段,得Q+1 个分段点xq,其中q=1 ,2,...,Q+1。确定xq,使操纵方案φq(vtr,xq)的运行时分tq满足时分精度要求|t-tq|<ε。记录操纵方案φ(vtr,xco)=φq(vtr,xq)。
Step9:记录牵引末速度vtr对应的操纵方案φ(vtr,xco)及其能耗Etr。判断vtr>Vlimit是否成立。若成立,转Step10;若不成立,转Step5。
Step10:输出能耗Etr最小对应的操纵方案φ(vtr,xco)为最终方案Φ(vtr,xco),算法结束。
前述2层搜索原理如图5所示。图5中,在列车牵引结束位置xtr与到站位置xend之间,xco为理论最优惰行起始位置。算法首先通过上层分段搜索,确定xco所在分段[xp,xp+1]内;再对此分段[xp,xp+1]进行下层分段搜索,找到满足运行时分精度要求的分段点xq作为近似最优惰行位置。

图5 2层搜索原理示意图
4 案例分析
4.1 案例基础数据
案例线路选择某市地铁2 号线,线路数据和列车参数如表1和表2所示。仿真运算在2.3 GHz 处理器速度、8 GB内存PC机上的MATLAB R2018b中完成。

表1 线路基本数据

表2 列车基本特性参数
4.2 改进操纵方法节能效果
为了验证本文提出的单列车站间运行操纵策略节能效果,以站间3为例进行分析,站间线路坡道情况如表3所示。列车分别采用标准4 阶段操纵和本文提出的列车操纵方法运行结果如表4所示,列车站间运行速度曲线如图6所示。

表3 站间3线路基本数据

表4 4阶段操纵和改进操纵列车运行结果对比

图6 列车采用不同操纵策略速度曲线示意图
从图6中可以看出,列车采用4 阶段操纵,具有较长的出站牵引持续时间及较高的牵引末速度,且在后续的下坡道上实施制动以维持匀速运行。而采用改进的列车操纵方法,列车出站后提前结束牵引过程,采取惰行在下坡道上加速运行,当惰行无法加速时转为巡航工况匀速运行,然后再次惰行并制动进站停车。相比4阶段操纵策略,列车采用改进的操纵方法牵引能耗减少了6.06 kW·h,节能率达22.43%。
线路坡道设计方案会影响列车运行工况的选择,进而影响列车牵引能耗。为探究列车操纵方法在不同线路坡度条件下的节能效果,将上述站间线路坡道的坡度值乘1个坡度处理系数R(0.5≤R≤1.5),得到不同坡道情况的线路进行仿真,仿真结果如图7所示。

图7 列车在不同坡道线路上运行结果
从图7可以得出,随着坡道坡度数值的增加,4 阶段操纵下列车能耗水平呈现上升趋势,而改进操纵方法能耗逐渐下降,并趋于稳定,说明改进后的列车操纵方法相比4阶段操纵方法更适用于起伏变化较大的线路条件,不同线路坡度下平均节能率可达16.87%。
4.3 列车协同控制节能效果
为进一步验证所提出的列车协同运行控制方法的节能效果,选择3列车同向运行进行仿真,发车间隔为210 s,计算结果如表5所示。其中,策略1为不考虑协同的标准4 阶段操纵策略;策略2 为考虑协同的标准4 阶段操纵策略;策略3 为考虑协同的改进操纵策略。

表5 列车在不同操纵策略下的运行结果对比
从表5中可以看出:采用策略1 时,列车总牵引能耗最低,但由于没有考虑列车间再生能的利用,使得净能耗较高;采用策略2 时,虽然考虑了再生能利用情况,但由于只能通过延长列车出站牵引过程利用再生能,使得再生能利用量仍较少;相比策略1,净能耗小幅减小。采用策略3 时,虽然总牵引能耗有小幅增加,但是列车可通过2 次牵引利用再生能,再生能利用率显著提高至37.15%,使得净能耗显著下降。相比策略1,再生能利用率提高了15.08%,节能率达7.41%。此外,列车站间操纵策略计算时间均小于5 s,满足在线计算要求。
不同的发车间隔对于列车间的再生能利用情况和列车协同控制方法的节能效果有重要影响。图8显示了上述3种操纵策略在不同发车间隔下的再生能利用情况以及本文方法的节能效果。
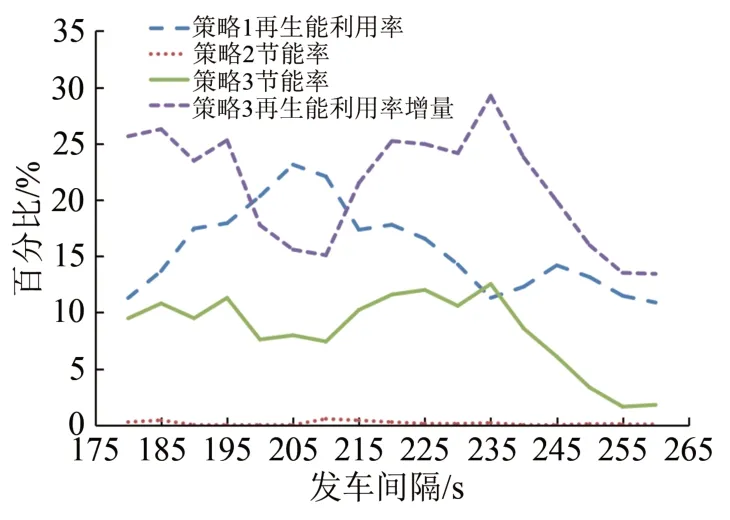
图8 列车在不同发车间隔下运行结果
由图8可知:当发车间隔小于4 min 时,不论采用何种策略,随着发车间隔的变化,再生能利用率呈现一定幅度的波动,但本文方法始终能取得一定的节能效果,节能率可达7%~13%。但当发车间隔进一步增大时,由于列车间相对距离增加,供电分区对再生能利用约束作用明显增强,使得列车协同控制的优势不再明显,节能率仅在1%~6%之间。在不同发车间隔下,采用考虑协同的改进操纵策略,再生能利用率相比个体最优操纵策略平均提高了21.22%,平均节能率达8.37%。此外,由于操纵策略2 只通过延长出站牵引利用再生能,其节能率仅在0~1%之间,这再次验证了本文对传统4阶段操纵策略进行改进的必要性。
5 结 论
了地铁列车协同运行控制滚动优化思想,在给定时刻表下考虑实时的列车运行状态及其它列车操纵方案,优化停站列车在下一站间运行的操纵方案,达到减小列车运行净能耗目的。
(2)为了减小列车牵引能耗,对传统的地铁列车4阶段操纵方法进行了改进,可充分利用线路坡道势能,减少列车出站牵引持续时间。案例结果表明,相比标准4阶段操纵策略,改进后的列车操纵方法在不同线路坡道情况下平均牵引节能率可达16.87%,且节能效果随着线路坡道坡度的增加呈现上升的趋势。
(3)案例分析表明,相比采用标准4 阶段的列车个体最优操纵策略,本文提出的列车协同运行控制方法在不同的发车间隔下再生能利用率平均可提高21.22%,平均节能率达8.37%。
(4)对于多列车同时制动或牵引的情形,牵引和制动列车操纵工况及其时机的匹配研究仍有优化空间,未来可针对再生能最优分配方法进行更深入的研究。
(1)基于车—车通信CBTC 系统特点,提出
