一种提高高压直流断路器机械开关触发回路可靠性的方法
2020-06-09李乐乐李汉杰张茂强
李乐乐,汪 涛,李汉杰,张茂强,田 杰
(南京南瑞继保电气有限公司,南京 211102)
0 引言
柔性直流输电系统具有可向无源网络供电、不会出现换相失败、运行方式灵活等传统直流无法比拟的优点,但是在发生直流侧短路时,由于直流侧等效电阻很小,所有换流器子模块的储能元件同时对故障点放电,会造成故障电流迅速上升。如果不对故障线路进行隔离,只能利用换流器交流侧的交流断路器切除故障电流,或者通过本身具有电流切除能力的换流器闭锁来切除短路电流[1-5],最终结果是任何一条直流线路上发生短路故障,都会导致柔性直流输电系统的所有换流器闭锁、系统停运,严重危害直流电网及相连的交流系统安全。
通过在直流线路两侧装配高压直流断路器,在直流故障发生后,迅速将故障线路切除,可以保证整个系统不受故障线路影响[6-10],但是如果高压直流断路器不能正确动作,就无法起到应有的故障切除作用。高压直流断路器已经成为直流电网故障元件快速隔离、构建直流电网的关键设备。
快速机械开关作为混合式高压直流断路器的关键组成部件,可以在几毫秒内完成分断,并将故障电流转移至可以分断故障电流的转移支路电力电子开关中[11-15],从而实现系统短路故障电流的切断。快速机械开关之所以能达到这么快的分合闸速度,是通过触发回路控制放电回路的半导体开关导通,将分合闸储能电容中的能量迅速在分合闸线圈产生上千安培的电流,在斥力盘中产生强大的电磁斥力,带动触头实现分合闸操作[16-17]。机械开关触发回路动作的可靠性直接决定快速机械开关甚至整个断路器能否正常运行,文献[18-19]对快速机械开关的动作时间、绝缘性能进行了研究,文献[20]对机械开关的动作机构进行了研究,但少有文献对机械开关触发回路及其可靠性进行研究,因此研究如何提高快速机械开关触发回路的可靠性意义重大。
在实际工程应用中,一般通过半导体器件的串联来提高其防误动的可靠性,通过部分功能电路的冗余设计来提高其防拒动的可靠性,但是往往因设计不足导致可靠性提升有限[21-28]。本文基于快速机械开关在高压直流断路器中的应用工况以及工程应用经验,对如何进一步提高快速机械开关触发回路可靠性进行深入研究。
1 快速机械开关触发回路现状研究
为了达到更高的绝缘水平,快速机械开关一般通过多个断口串联的方式来实现,每个断口有完全相同且独立的触发回路。如图1 所示,触发回路由一次放电回路和二次控制回路组成,放电回路通常用功率半导体器件实现,如SCR(晶闸管)控制回路用于实现放电回路的监视和控制。快速机械开关的动作原理为: 控制回路接收上级下发的分合闸命令,控制放电回路导通,分合闸储能电容中的能量在分合闸线圈中产生大电流,推动斥力盘带动触头实现断口的分闸或合闸操作。
快速机械开关触发回路主要由电源模块、命令接收模块、FPGA(现场可编程逻辑门阵列)模块、触发模块、SCR 等五大模块单元组成。为了提高触发系统的可靠性,兼顾成本、体积、电气隔离等限制措施,在实际工程应用中通常会采取部分冗余措施以提升可靠性。
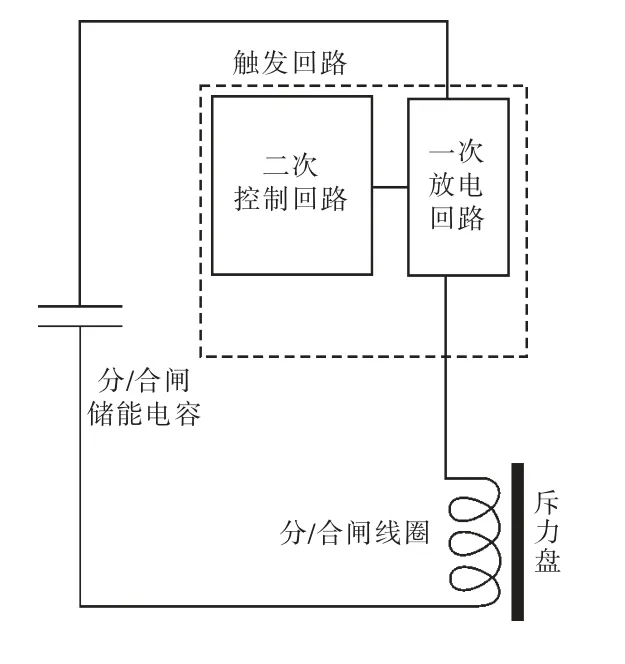
图1 一个断口的分合闸回路
如图2 所示,一次放电回路中采用两级SCR串联,二次控制回路中控制板卡采用双路电源冗余供电、双路控制命令冗余接收,每只SCR 配备独立的触发回路等。

图2 工程常用的触发回路
一次放电回路通过两级SCR 串联在一定程度上可以降低触发回路误动的概率,但是也增大了触发回路拒动的概率。控制回路的冗余设计可以提高单级SCR 触发可靠性,但是对于一次放电回路的整体触发可靠性提升有限,本文对现有的触发回路进行深入分析,研究了能进一步提高快速机械开关触发回路可靠性的方法。
2 提高触发回路可靠性分析
2.1 现有触发回路分析
快速机械开关触发回路是由电源模块、命令接收模块、FPGA 模块、触发模块、SCR 等众多模块单元组成的混联系统。该混联系统可分解为串联系统和并联系统的组合,以下将从串、并系统的角度对触发回路的可靠性进行详细分析。
2.1.1 串联系统
串联系统是组成系统的所有单元中任一单元失效就会导致整个系统失效的系统,假定各单元是统计独立的。
系统可靠性数学模型为:

式中: Ra为系统可靠度;Ri为第i 单元可靠度。
系统失效率数学模型为:

式中: λa为系统失效率;λi为第i 单元失效率。
串联系统的可靠度随着单元可靠度的减小及单元数的增多而迅速下降,为了提高串联系统的可靠性,单元数宜少,而且应该重视改善最薄弱单元的可靠度。
2.1.2 并联系统
并联系统是组成系统的所有单元都失效时才失效的系统,假定各单元是统计独立的。
则系统可靠性数学模型为:

式中: Fi为第i 单元不可靠度;Ri+Fi=1。
则系统失效率数学模型为:
并联系统对提高系统的可靠度有显著效果,考虑到成本等因素,实际工程应用中n 常取2,3。
假设快速机械开关触发回路五大组成单元的可靠度及失效率分别为:
(1)电源回路可靠度为R1,失效率为λ1;
(2)光接收回路可靠度为R2,失效率为λ2;
(3)FPGA 可靠度为R3,失效率为λ3;
(4)触发模块可靠度为R4,失效率为λ4;
(5)SCR 可靠度为R5,失效率为λ5。
为便于进行统计分析,假设各单元的可靠度都相等,均为R1=R2=R3=R4=R5=R,各单元的失效率都相等,均为λ1=λ2=λ3=λ4=λ5=λ。
图2 所示为工程常用的快速机械开关触发回路,其触发系统的等效模型如图3 所示,并联系统中任一单元故障,不影响触发回路正常工作,快速机械开关可进行正常的分合闸动作;串联系统中任一单元故障,则触发回路故障,快速机械开关拒动,导致系统不能正常分合闸。

图3 工程常用触发回路等效模型
该系统分合闸正常动作的可靠度为:

该系统分合闸发生拒动的失效率为:

2.2 高可靠性触发回路1 分析
为进一步提升触发系统的可靠性,本文对一次放电回路和二次控制回路分别加以优化,如图4 所示。
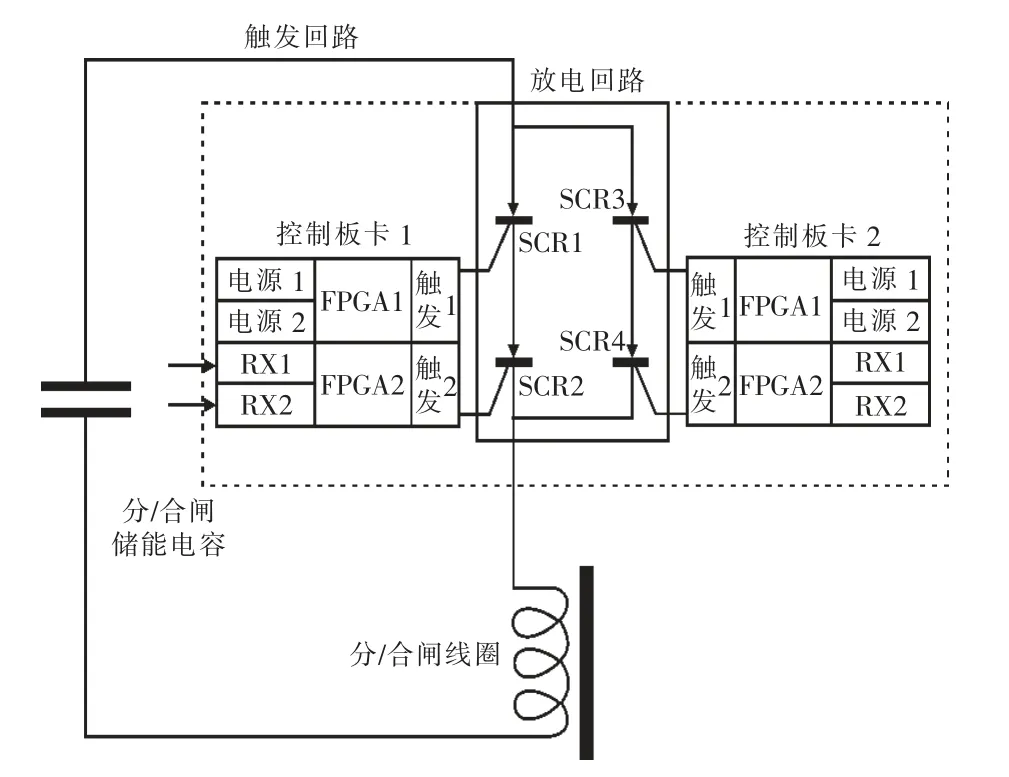
图4 提高可靠性后的触发回路1
(1)一次放电回路配置。采用4 只SCR 先串联再并联的方式,串联保证了单级SCR 故障不会引起放电回路误触发,并联保证了单级SCR 故障不会引起放电回路拒动。
(2)二次控制板卡配置。采用2 块独立的控制板卡,分别控制2 个独立的SCR 串联放电回路,单一板卡故障,不影响另一套SCR 串联放电回路正常工作。
(3)二次控制板卡。每个二次控制板均设计冗余电源单元、冗余光接收单元、冗余FPGA 配置,任一单元故障不影响该板卡正常工作,2 路独立的SCR 触发回路分别控制串联放电回路的2只SCR。
图5 为优化后的触发回路1 等效模型。
该系统分合闸正确动作的可靠度为:

该系统分合闸发生拒动的失效率为:

2.3 高可靠性触发回路2 分析
为进一步提高放电回路的冗余度,可以将放电回路设计为先并联再串联的方式(如图6 所示),当SCR1,SCR4 或SCR2,SCR3 同时发生触发故障时,放电回路仍能正常工作。但是当SCR1,SCR4 或SCR2,SCR3 晶闸管同时发生击穿故障时,放电回路会发生误触发。该方案在提高触发回路正常动作可靠性的同时,也提高了误触发的动作概率。
图7 为优化后的触发回路2 等效模型。该系统分合闸正确动作的可靠度为:


图5 提高可靠性后的触发回路1 等效模型

图6 提高可靠性后的触发回路2

图7 提高可靠性后的触发回路2 等效模型
该系统分合闸发生拒动的失效率为:
2.4 不同触发回路可靠性对比
为便于对3 种触发回路的可靠性进行对比分析,取可靠度R=0.999 9,失效率λ=0.000 1,计算各触发回路的可靠性数据,如表1 所示。

表1 不同触发回路可靠性数据比较
从表1 中可以看出,触发回路2 的正确动作可靠度是最高的,冗余设计可以在某单元发生故障时保证快速机械开关正常动作,触发回路1 的正确动作可靠度略低,远高于工程常用触发回路的可靠度;高可靠性触发回路1 的拒动失效率是最低的,在某单元发生故障时保证快速机械开关不会发生拒动。在放电回路发生两级SCR 击穿故障时,高可靠性触发回路1 发生误动的概率是最小的。不同触发回路的可靠性直观对比见图8。

图8 不同触发回路可靠性对比
综上,高可靠性触发回路1 的实现方法能最大程度上保证机械开关动作的可靠性。
3 结语
本文针对高压直流断路器快速机械开关触发回路,从其正确动作可靠度、拒动失效率、误动概率等方面进行深入分析,提出了提高机械开关触发回路可靠性的方法,通过对不同触发回路组成的混联系统进行对比分析,兼顾故障发生时触发回路提高正常动作可靠性,同时降低误动、拒动发生的概率,提出了一种适合工程应用的最优触发回路实现方案,在直流系统发生故障时确保高速机械开关触发回路能可靠动作,使高压直流断路器能及时、可靠地切除故障点,保障直流输电系统安全、稳定运行。
