ADS-B监视报文参数统计及其所需性能
2020-06-08宫峰勋李丽桓马艳秋
宫峰勋,李丽桓,马艳秋
1. 中国民航大学 电子信息与自动化学院,天津 300300
2. 中国民用航空三亚空中交通管理站,三亚 572000
广播式自动相关监视(ADS-B)为空域非雷达监视提供技术基础,为空中交通管制能与交通容量提升提供可能。国际民航成员启动了ADS-B地面系统装备工程,且将逐步实施基于ADS-B的非雷达管制。澳大利亚是国际民航组织(ICAO)成员中率先宣布完全采用ADS-B实施空域监视的国家[1]。该国空管部门陆续公布一些ADS-B航迹信息,图片显示ADS-B航迹存在不连续现象[2]。近年来,该国宣布还将陆续装备陆基空管二次雷达等监视设备。2019年3月,美国联邦航空局发布ADS-B性能用户指导报告[3],要求用户报告ADS-B数据质量,并采用位置导航精确度分类值(NACP)标示ADS-B可用性。可见,美国联邦航空局也开始担心ADS-B数据质量问题。ADS-B技术已广泛应用于空域监视,基于报文质量及其位置数据质量的跟踪与分析得到国内外研究者普遍关注[4-9]。
目前,数据质量研究多从报文的导航不确定性类别指标统计出发,即提取每份ADS-B报文的位置导航不确定性指标(NUCP),汇总NUCP数据得到统计分布状态,当NUCP≥5的比例超过95%即认为符合监视性能要求[10-11]。现有NUCP统计分布状态研究结果显示,几乎所有ADS-B报文的位置参数分布都符合ICAO基于通信监视性能(PBCS)[12]要求。因此,对ADS-B系统快速推广及星基ADS-B技术进行深入研究,综合分析ADS-B报文信息项及其数据质量参数的变化状态,揭示在PBCS与卫星导航广域增强服务下的ADS-B监视性能非常重要。
1 问题描述
ADS-B航迹普遍存在不连续和跳点现象,导致其空管服务能力受到质疑。
澳大利亚空管服务商Airservces发布了ADS-B监视数据,但未见其发布具体的NUCP统计数据信息。故采用如图1所示Airservces给出的NUCP数据及异常数据[2]形式。可见,其中既有NUCP=6的优秀状态,也有NUCP=0的异常状态。
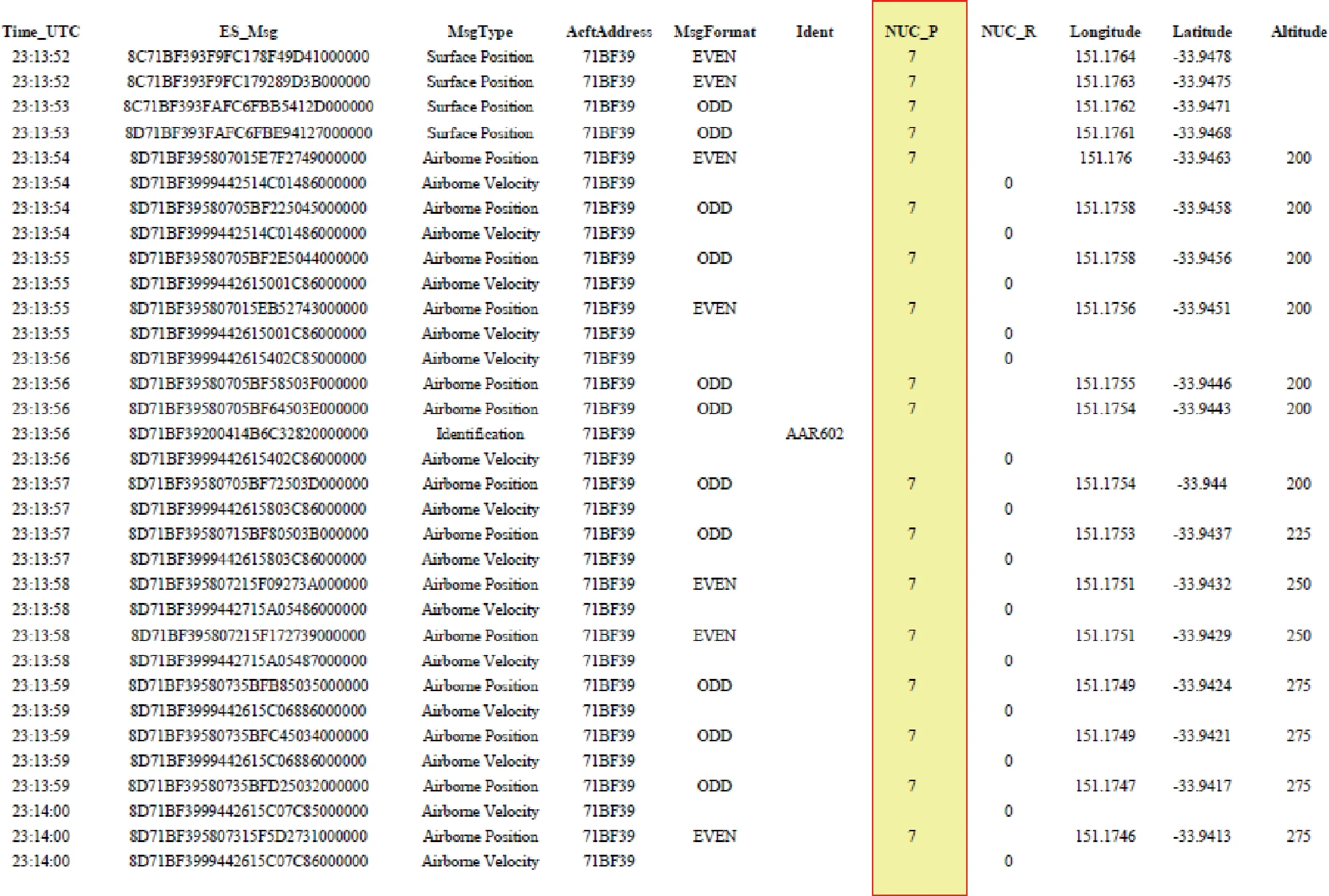
图1 澳大利亚公布的NUCP=0的数据分布[2]
图2为澳大利亚Airservces公布的采用ADS-B监视的动态航迹显示图[2]。如图1和图2所示,澳大利亚ADS-B监视覆盖空域上飞机航迹的线性偏离度很小,但动态航迹上还是有明显的间断现象。NUCP是否0与动态航迹的间断、跳点和偏差存在对应关系。
图3为美国霍尼韦尔所属HTSI公司公布ADS-B报文数据测试研究报告[13]中给出的NUCP数据统计分布状态,其中NUCP≥5是其主要分布区间,但也有为数不少的NUCP=0的状态。图4为从Flightradar24网站随机抓取的美国国内航线ADS-B监视航迹状态。如图3和图4所示,美国空域内ADS-B报文给出的航迹偏离度虽然很小,但也存在航迹间断,同时NUCP=0的情况竟然超过10%。
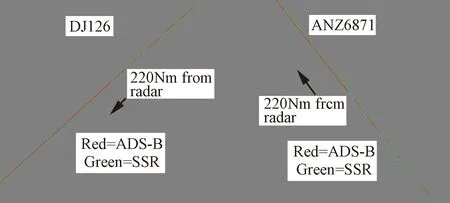
图2 澳大利亚空域ADS-B动态航迹[2]
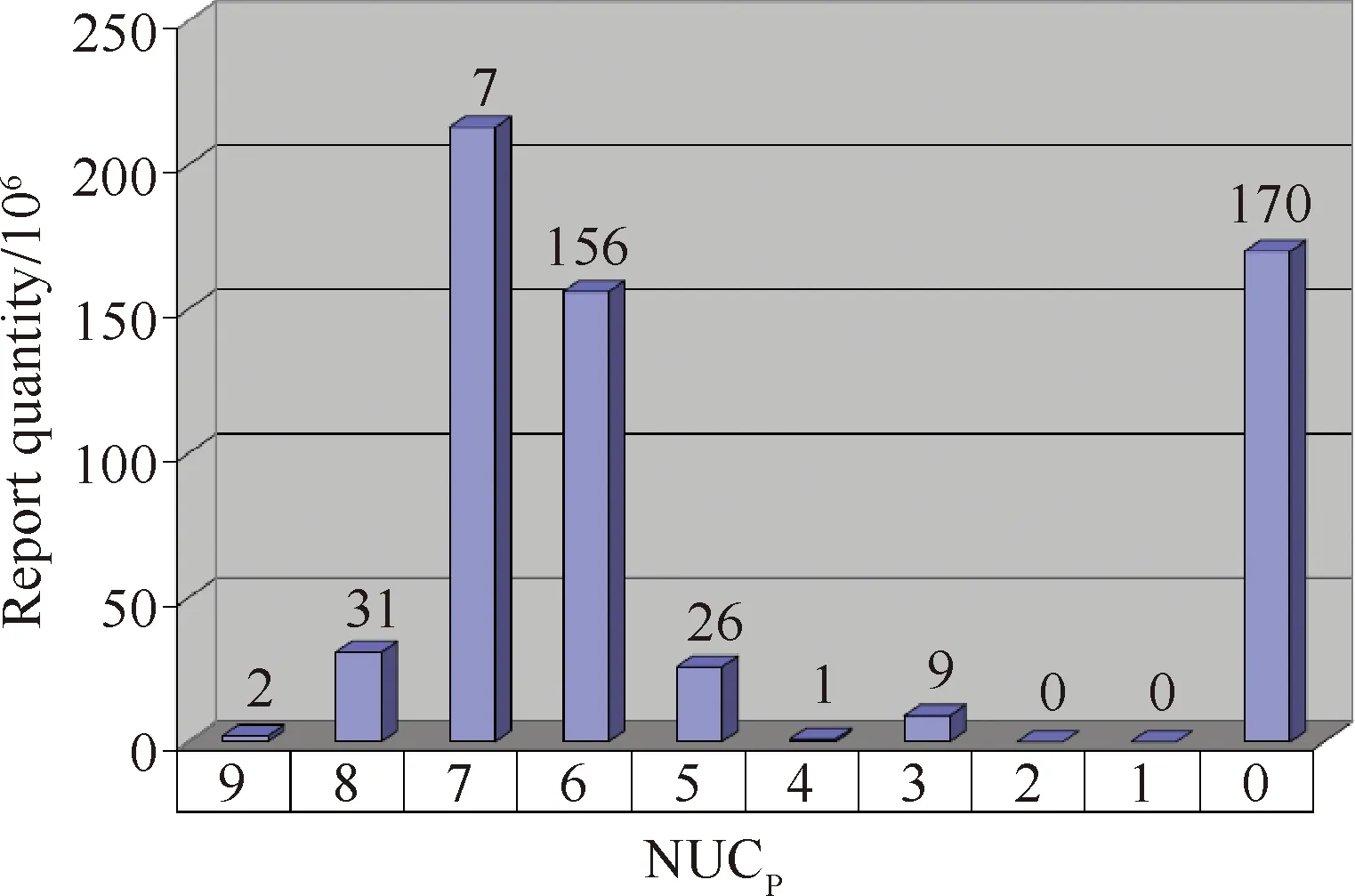
图3 霍尼韦尔公司公布的NUCP数据统计分布[13]
图5为文献[9]研究者给出的国内某终端区ADS-B报文NUCP数据统计分布状态。图6为本文所获取的中国某航路/航线ADS-B监视空域的动态航迹。可见,ADS-B监视的航迹偏差较大,且存在明显的航迹间断现象,但是NUCP=0的情况却仅超过5%。

图4 美国国内航线ADS-B监视航迹状态

图5 文献[9]公布的NUCP数据分布状态
如图1、图3和图5所示,从ADS-B报文所提取的位置导航不确定性指标(NUCP)基本围绕NUCP≥7呈现近似正态分布状态。同时,也存在一定数量NUCP=0的异常状态出现。如图2、图4和图6所示,ADS-B动态航迹均存在比较明显的不连续现象。

图6 中国航线ADS-B监视航迹状态
综上所述,从基于性能监视及航迹质量考虑,ADS-B监视可能不符合所需监视性能要求,即NUCP等作为评估ADS-B监视性能的主要指标,达到DO-260B要求,却存在ADS-B航迹无法同时满足ICAO的PBCS规范性要求的问题。
2 所需性能模型构建
在2010年亚太经合组织全球导航卫星系统实施小组第14次会议上,Deborah博士代表美国联邦航空局确认,在具备广域增强服务(WAAS)且当全球导航卫星系统(GNSS)具备99.9%可用性时,存在如图7所示的导航所需性能(RNP)与监视所需性能(RSP)之间基于航班安全间隔的对应关系[14]。ADS-B应符合这个要求。
ADS-B被视为由导航卫星、机载设备、空地通信链路和地面设备等组成的多部件复杂系统,各部件之间存在相依性,其所需性能则由部件数量及部件间耦合关系决定。因此,任一部件性能下降都将导致ADS-B系统整体性能无法达到监视所需性能要求。根据ICAO基于性能的通信和监视手册可得如图8所示的RNP、所需通信性能(RCP)、RSP与空中交通管理(ATM)之间的协作支撑关系(T为传输时延)。其中较明确刻画了RNP、RCP、RSP三者之间的相关性支撑关系[15-16]。
于是,ADS-B系统可被视为一个由3个部件组成的二终端(单输入节点单输出节点)式串联系统[17],且3个部件性能应分别满足RNP、RCP、RSP要求。则基于ADS-B报文的监视质量由RNP、RCP、RSP及其相关性制约函数CR综合决定,即ADS-B系统所需性能对应的性能模型可表述为
RADS-B(x)=RRNP(x)RRCP(x)RRSP(x)×
CR(rnp,rcp,rsp)
(1)
式中:RRNP(x)、RRCP(x)和RRSP(x)为ADS-B系统组成部件对应的导航、通信和监视的可用性函数;CR(rnp, rcp, rsp)为导航、通信和监视系统之间的互相关函数。
目前默认ADS-B系统导航、通信和监视的可用性函数不相关,即CR(rnp, rcp, rsp)=1。
1) 当RRNP(x)≥99.9%,条件得到满足,即RRNP(x)接近常数1且与其他不相关时,式(1)可简化为
RADS-B(x)=RRCP(x)RRSP(x)CR(rcp,rsp)
(2)
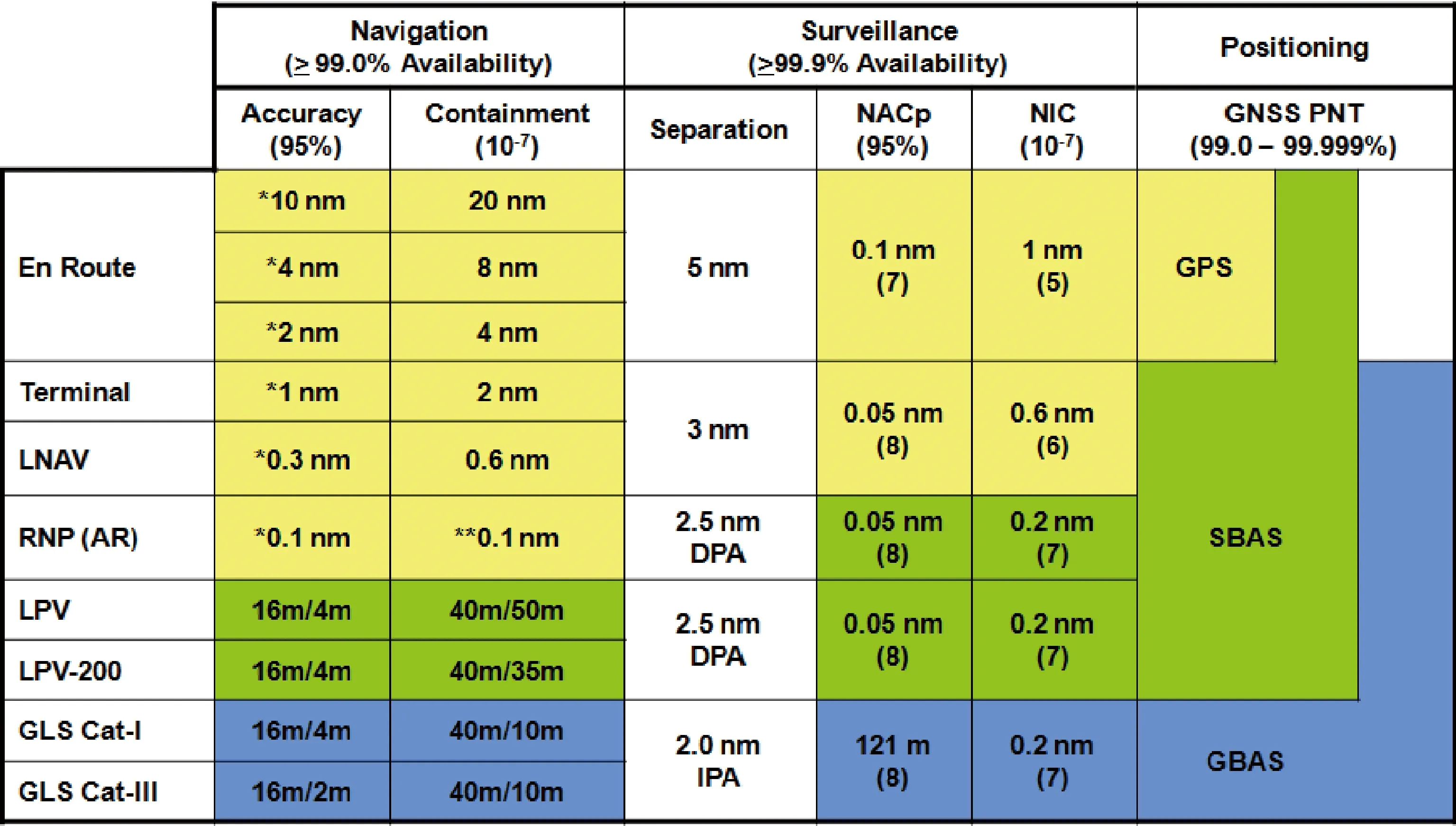
图7 导航所需性能与监视所需性能的对应关系
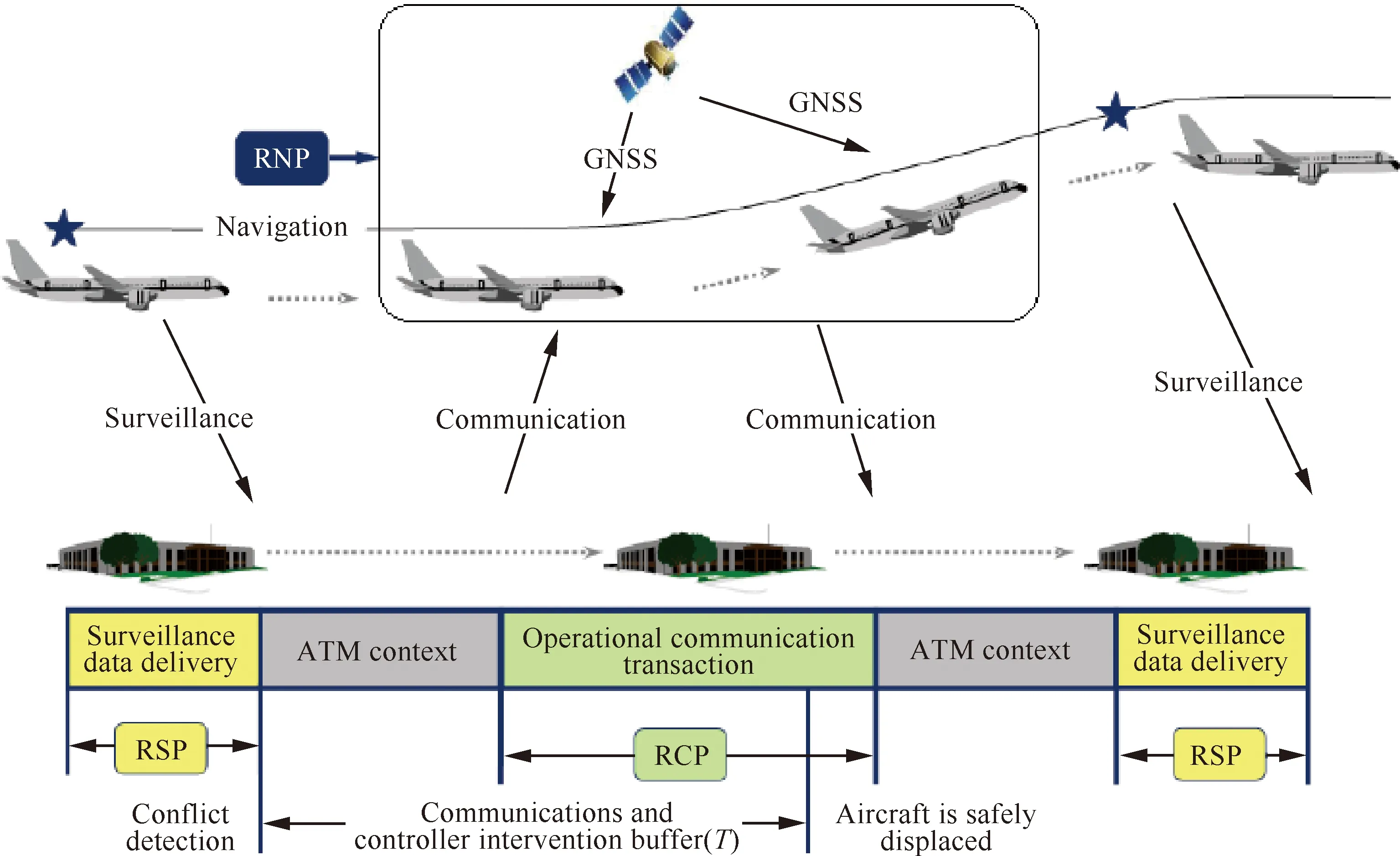
图8 RNP、RCP、RSP与ATM相关性支撑关系
2) 当RRCP(x)≥99.9%,条件得到满足,令RRCP(x)接近常数1且与其他不相关时,式(2)简化为
RADS-B(x)=RRSP(x)CR(rsp)
(3)
由式(3)可见,由于RRNP(x)、RRCP(x)接近常数1且彼此不相关,从ADS-B报文获得的位置数据等信息可用性也就为ADS-B监视可用性。故实际数据分析中多直接用位置导航不确定性等指标替代可用性指标,则式(3)再被简化为
RADS-B(x)=RRSP(nucp)Cr(rsp)=RRSP(nucp)
(4)
式中:CR(rsp)为自相关函数,令其取1。
因此,目前分析认为只要ADS-B报文中提取的NUCP≥5,则认为ADS-B监视性能达到ICAO相关规范要求。显然,即便是采用式(4)的形式分析ADS-B监视性能,RRSP(x)函数中变量也不应该仅含有NUCP,还应该包含ADS-B报文中其他参数。即当RRNP(x)、RRCP(x)接近常数1且导航、通信和监视系统之间不相关时,式(4)应修正为
RADS-B(x)=KWAKCRRSP×
(accuracy,integrity,continuity,N)=
KWAKCRRSP(nucp,rept,leak,hop,n)
(5)
式中:RADS-B(x)的变量accuracy、integrity和continuity表示报文定位的准确性、完好性和连续性指标。根据DO-260规范的ADS-B报文用于定位、监视完好性要求,采用nucp表征accuracy变量,位置质量指标报告率(rept)、漏点率(leak)和跳点率(hop)等表征integrity和continuity变量;N为空管自动化系统屏幕刷新周期内报文次数,用n表征。KWA为导航卫星增强状态参数;KC为通信链路性能参数。则式(5)可简化为
RADS-B(x)=
KWAKCRRSP(nucp,rept,leak,hop,n)
(6)
可见,ADS-B监视准确性、完好性和连续性同时达标,才有可能达到ICAO监视规范要求。
3 所需性能模型仿真分析
空中交通管制(ATC)系统的屏幕刷新周期为5 s, ADS-B报文更新率为1 s[18],则ATC屏幕刷新周期内有4份ADS-B报文。由于报文间隔时间短,可视1份ADS-B报文重复4次。设每份ADS-B报文各项参数满足串联形式,式(6)表示为[17]
RADS-B(x)=KWAKC{1-
[R(nucp)×R(rept)×R(leak)×R(hop)]4}
(7)
启动ADS-B监视性能测试实验,设置编号为1#和2#的2个间隔20 km、不同生产商的ADS-B地面站,对覆盖空域内航班ADS-B报告持续监视。连续采集3个月的ADS-B报文,总数量分别达到94、371、820和104、203、710条。提取每一份报文中包括NUCP、NIC、标识等信息项,统计分析它们数据的分布状态。
3.1 位置质量指标统计
从每份ADS-B报文数据中提取位置质量指标(NUCP)数值,汇总得到NUCP数据归一化相对分布状态如图9所示。计算R(nucp) 时,仅考虑位置导航不确定性NUCP≥5的情形。此时,R(nucp)分别取为(87.07+11.17+0.38)%=98.62%和(88.09+9.45+0.64)%=98.18%。
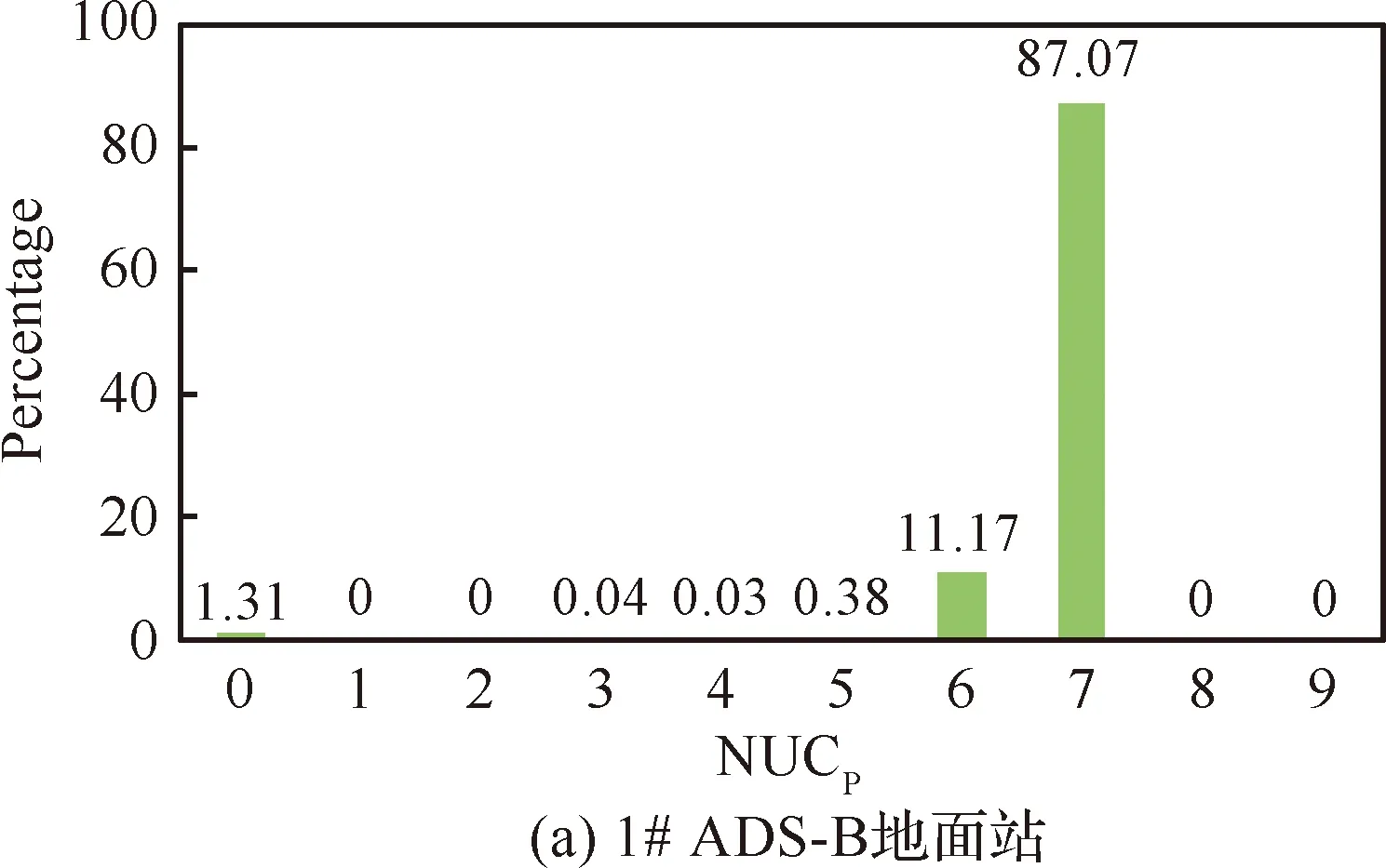
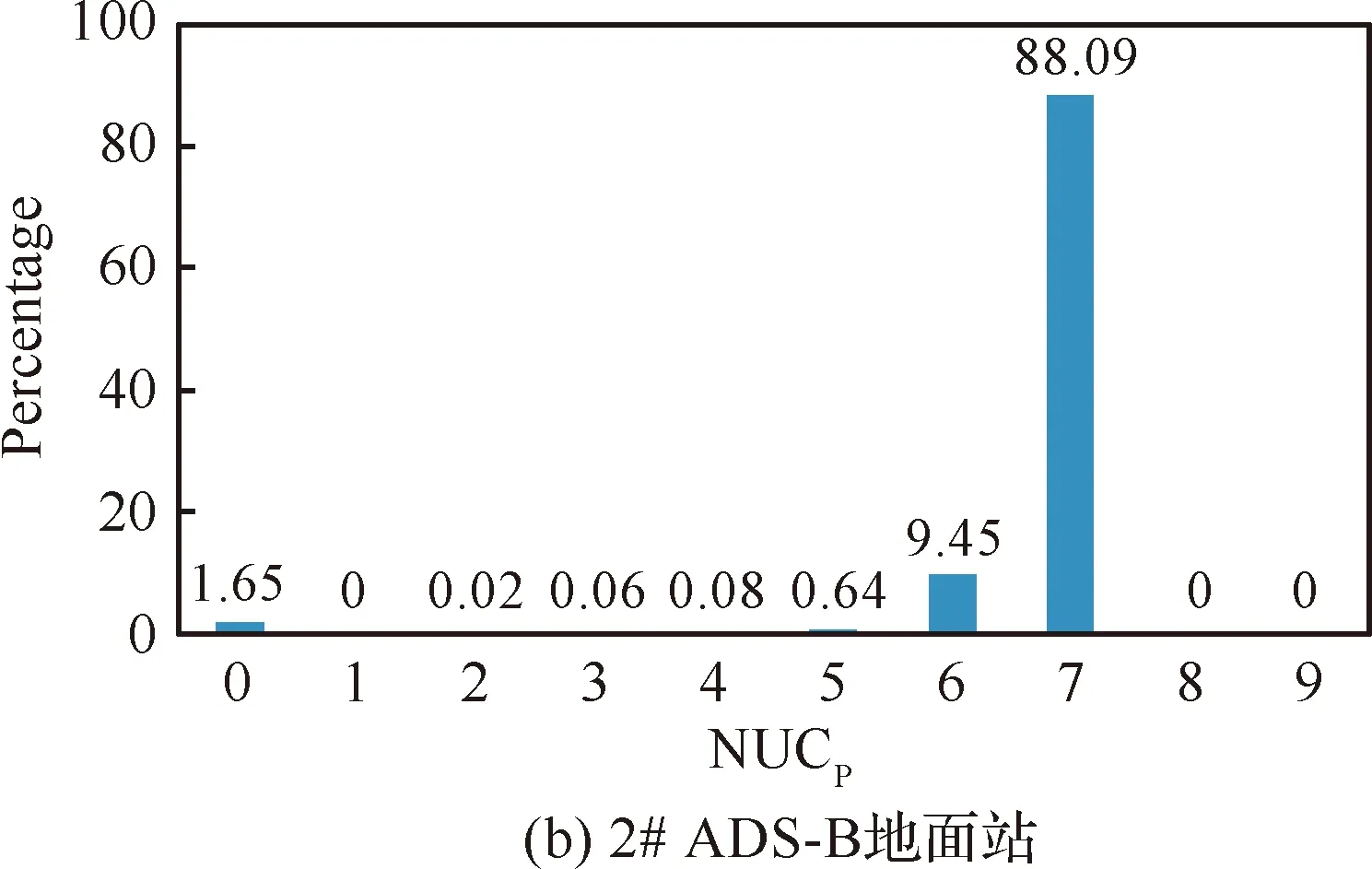
图9 ADS-B地面站NUCP统计分布
3.2 质量指标报告率统计
所需数据项数据完好性是指报文中所包含的用户数据项中实施ADS-B监视的最低要求的数据项完好性[19-20],包括二次代码等共8项。
以位置质量指标为例,采用:位置质量指标报告率=含位置质量指标信息的航迹点总数/航迹总点数×100%,可得位置质量指标报告率。
ADS-B报文的航迹数据完好性分析的统计结果如图10所示。计算RRSP(rept)时,仅考虑航迹数据完好性分布中的最小值。故R(rept)分别取为91.09%和95.16%。
3.3 报文漏点率统计
从离港航班中选择一个固定航班,统计该航班在不同飞行阶段的ADS-B报文漏点率。实际统计中将漏点阈值设为2 s。即若连续n(n≥2) s未收到航迹点,则认为ADS-B报文出现n-1个漏点,漏点数增加n-1。ADS-B报文数据漏点率的统计结果如图11所示。

图10 ADS-B报文的航迹数据完好性分布

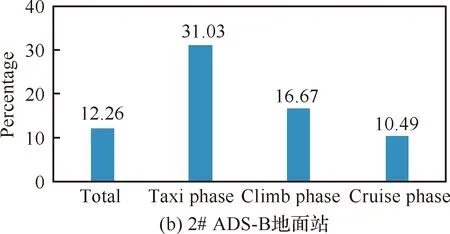
图11 ADS-B报文的航班漏点率统计图
可见,1# ADS-B地面站离港航班实际数据的平均漏点率接近13.07%,2# ADS-B地面站离港航班实际数据的平均漏点率接近12.26%。
计算RRSP(leak)时,取飞行4个阶段的平均值,故R(leak)分别取为(100-13.07)%=86.93% 和(100-12.26)%=87.74%。
3.4 数据跳点率统计
ADS-B报文的数据跳点率包含水平跳点率和高度跳点率2个方面。当水平位置误差和垂直位置误差大于预先设定阈值(一般设置为300 m)时,则认为该目标为跳点[20]。分别跟踪一个离港航班和一个进港航班的航迹数据,它们水平和垂直向位置误差分布如图12所示。可见,ADS-B报文的水平和垂直方向位置误差主要集中在0~100 m范围内。
计算跳点率RRSP(hop)时,仅考虑误差小于100 m的情况(①因为前面NUCP≥5,②因为航路高度层间隔仅为300 m),故R(hop)分别取其中最小值,即min{78.12%, 88.57%}=78.12%和min{75.02%, 82.73%}=75.02%。
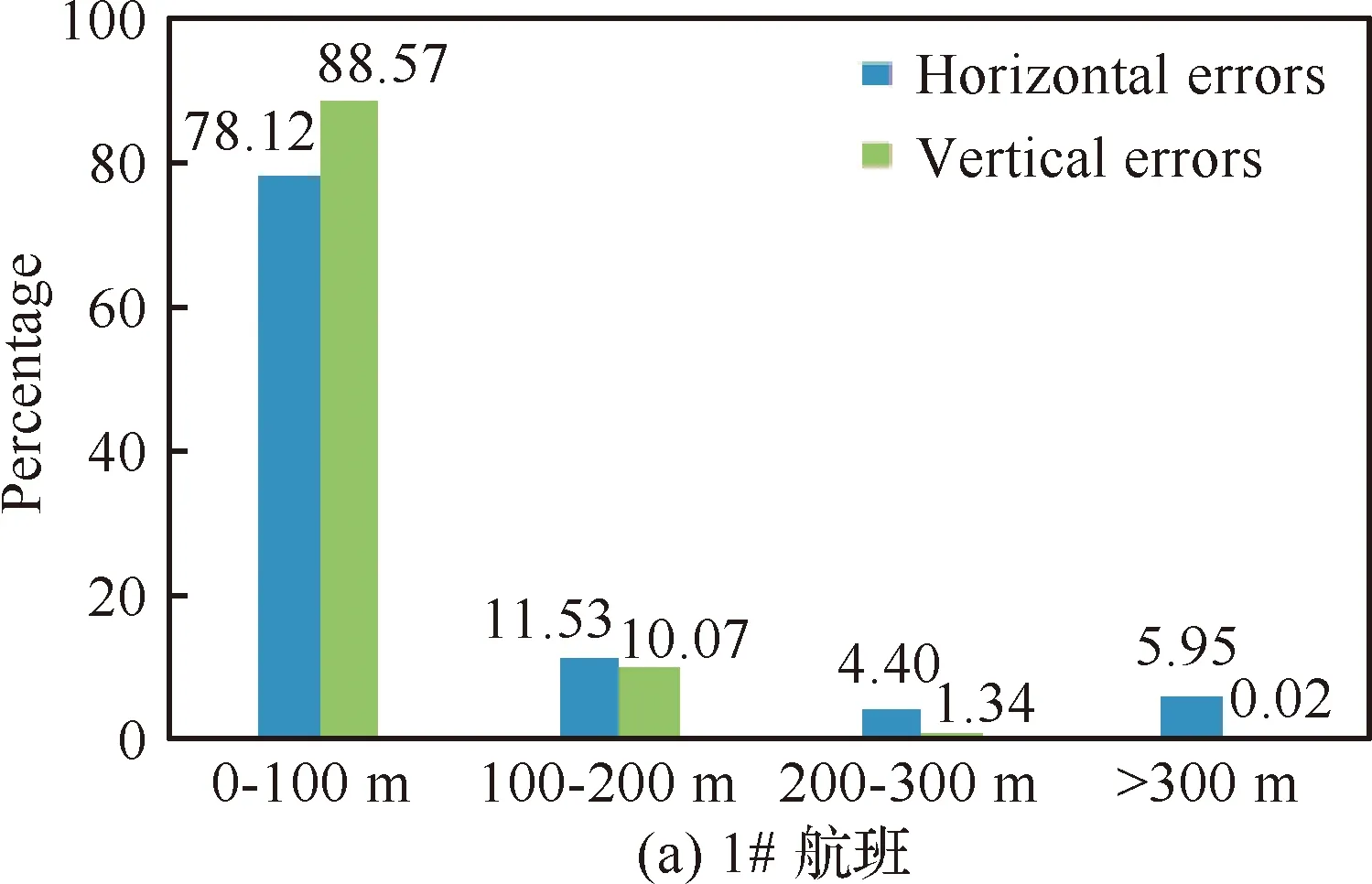

图12 航班水平误差和垂直误差分布
3.5 报文所需性能估算
ADS-B报文漏点率是将漏点阈值设为2 s时计算得到的。在ATC屏幕刷新周期5 s内,被统计检测不超过3次,参照二终端式串联系统可靠性计算原理[17],式(7)简化修正为
RADS-B(x)=KWAKC{1-4[1-R(nucp)×
R(rept)×R(hop)]2×[1-R(leak)]2}
(8)
假设ADS-B地面站运行环境满足要求,可令KWA=KC=1,于是1# ADS-B地面站所需性能为
RADS-B1(x)=1-
4[1-R(nucp)×R(rept)×R(hop)]2×
[1-R(leak)]2=
1-4[1-0.986 2×0.910 9×0.781 2]2×
[1-0.869 3]2=0.993 9=99.39%
(9)
2# ADS-B地面站所需性能为
RADS-B2(x)=
1-4[1-R(nucp)×R(rept)×R(hop)]2×
[1-R(leak)]2=
1-4[1-0.981 8×0.951 6×0.750 2]2×
[1-0.877 4]2=0.994 6=99.46%
(10)
由式(9)和式(10)计算结果可见,在ATC屏幕刷新的单个周期内,2个ADS-B地面站监视性能均未达到ICAO的PBCS规范性中的最低要求。也就是,在默认WAAS服务存在、系统导航通信所需性能为1、导航通信和监视的可用性相关函数为1的情形下,2个ADS-B地面站监视所需性能估计值均未达到图7所示的监视可用性需达到99.9%的数值要求。
用式(5)估算捷克理工大学2017年公布的ADS-B报文数据[21]所用ADS-B地面站的所需性能。该文献采用ICAO的ADS-B性能认证版本2统计ADS-B报文数据,参数包含导航完好性等级(NIC)、监视完好性等级(SIL)和导航精确度等级(NAC)等参数,直接给出accuracy、integrity和continuity的对应参数,且统计独立时,参照二终端式串联系统可靠性计算原理[17]及典型串联二终端系统,式(5)可改写为
RADS-B(x)=
KWAKCRRSP(accuracy,integrity,continuity,N)≈
KWAKCRRSP(nacp,nic,sic,n)≈
KWAKC[R(nacp)R(nic)R(sic)]n
(11)
取NACP≥5情形,R(nacp)=(0.08+42.91+50.59+3.93)%=97.51%;取NIC≥5情形,R(nic)=(0.03+2.38+88.23+7.25)%=97.89%; 取SIC≥3情形,R(sic)=(1.09+95.60)% =96.69%。由于文献[21]未提供屏幕刷新频率,故分2种情形估算:
1) ADS-B报文每秒刷新1次。令KWA=KC=1, 由式(11)可得
RADS-B(x)=R(nacp)R(nic)R(sic)=
0.975 1×0.978 9×0.966 9=
0.922 9=92.29%
(12)
2) ADS-B报文每秒刷新2次,
RADS-B(x)=[R(nacp)R(nic)R(sic)]2=
(0.975 1×0.978 9×0.966 9)2=
0.851 8=85.18%
(13)
在不考虑WAAS服务及通信性能影响时,捷克理工大学所用ADS-B地面站所需性能的估计值为92.29%。由式(9)、式(10)和式(12)结果所示,通过报文方式实现监视,各类ADS-B地面站所需性能不一,但均未能达到图7要求的99.9%。
ADS-B运行依托卫星导航,其应用需考虑WAAS服务影响。图13所示为美国FAA公布的每日实时广域增强系统覆盖区域服务状态[22],其中HPL为水平保护限值。
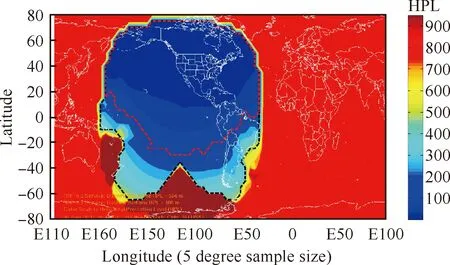
图13 北美地区空域具有广域增强实时覆盖图
可见,仅北美地区空域有WAAS服务且等级最高,亚欧非地区没有覆盖服务,故3.5节估算中令KWA=1不合适,即KWA的实际数值要小于1,且标示1 090 MHz通信链路状态的KC也要小于1。因此,再考虑上述因素及系统初始可用性时,式(9)、式(10)和式(12)计算结果都将更小,都无法达到ICAO的Doc9684[23]关于应答检测概率99%和图7所示可用性要求。
4 结 论
通过对2个ADS-B地面站接收到的近2亿条ADS-B报文数据项统计分析结果,并利用构建的ADS-B系统监视所需性能模型,估算了2个ADS-B地面站以及捷克理工大学所用ADS-B地面站的所需性能参数,结论如下:
1) 测试空域ADS-B报文NUCP指标统计分布峰值基本出现于NUCP=7时,且NUCP=6和NUCP=7两项之和都超过95%,但漏点率仍以较高概率出现。
2) 在缺少WAAS服务下,ADS-B监视所需性能会下降。与具有WAAS服务的美国空域相比,航迹偏离程度大且间断明显增多。
3) 默认WAAS服务存在,1#和2# ADS-B站以及捷克理工大学的监视所需性能均未达到图7所示可用性的要求。
4) ADS-B报文中数据项较多,是导致ADS-B监视所需性能下降、未能达到图7所示可用性要求的主要原因之一。
5) ATC系统单位刷新周期内ADS-B报文的广播次数或者报文重复率增多,未能有效提升ADS-B监视所需性能。
6) 单纯提升NUCP指标或NACP指标,对ADS-B监视系统性能的提升效果有限。
综上所述,ADS-B系统监视性能各异,同时ADS-B监视系统在独立承担空中交通管制所需的空域监视性能方面需要进一步提升。建议与其他监视手段配合实现管制空域的可靠、连续、无缝监视。
致 谢
本论文中部分航迹数据采集工作得到团队成员汪瀚淼、杨琳和曹雅茹等研究生的协助,特此感谢。
