跨距与运动约束的隧道内列车惯性导航方法
2020-06-08赵启超吴文启张礼廉唐康华
赵启超,吴文启,张礼廉,唐康华
(国防科技大学智能科学学院,长沙 410073)
0 引言
在高速列车行驶中,列车的导航定位在列车调度、安全运行与铁路检测维护等方面起着非常重要的作用。在列车导航中,高速度、隧道环境以及高可靠性需求等方面都面临着很大的挑战,但同时行驶路线的固定性和方向稳定性也能为导航定位提供辅助。本文主要解决的问题是列车在隧道内的定位,铁路隧道的特点是结构比较固定,但缺失卫星信号并且距离可能较长,光照较弱而且缺少纹理。车载导航常用的传感器有全球导航卫星系统(Global Navigation Satellite System,GNSS)、惯性测量单元(Inertial Measurement Unit,IMU)、相机、激光雷达、轮式里程计等,在列车导航中,也使用应答器、多普勒雷达、涡流传感器等定位方式[1]。GNSS可以为列车提供高精度的位置和速度信息,但是在隧道等被遮挡环境中,GNSS将失去作用。惯性导航系统(Inertial Navigation System,INS)使用IMU作为传感器,不受外部环境干扰,可以提供连续的导航信息,但是导航精度受器件误差特性影响,而且存在累计误差。
关于列车在隧道内导航的相关研究,刘射德等设计了一种GNSS/INS/地图匹配的列车组合定位系统[2],但是没有评估GNSS缺失时的定位精度,无法确定列车在隧道中的地图匹配能否抑制INS的误差累计。Kim等设计了一种多传感器融合的列车导航系统,包括IMU、轮式测速仪、多普勒雷达、差分GNSS、无线射频模块,以及运动约束和地图匹配算法,即使在隧道中也具有较高的定位精度和容错性,但传感器占用的空间、多传感器标定以及射频芯片在铁轨上的安装等都是实际存在的问题。不限于列车导航,GNSS拒止环境下的导航也有很多研究,例如李增科等提出了对GNSS、INS、里程计进行神经网络训练,以生成里程计的速度校正,在GNSS中断时可以提高位置精度[3]。万国伟等设计的无人车导航系统包括MEMS IMU、激光雷达、GNSS,此系统在公路隧道中利用IMU和激光雷达组合导航,可以获得较好的定位效果[4],但是激光雷达导航需要预先建图,具有一定的局限性。Tolga等针对管道内的检测无人机设计了一种范围定位算法,基于管道的圆柱形信息,使用相机、激光雷达和IMU对其内部环境建图并对自身定位[5]。
接触网是悬挂于铁轨与列车上方为列车提供电能的装置,在列车运行期间容易与列车受电弓之间产生电火花。本文的应用场景是确定列车运行时产生的电火花的位置,这个位置与列车位置有对应关系。从成本和安装空间考虑,本文使用GNSS、MEMS IMU和相机作为传感器,其中相机与检测电火花的相机是同一台。接触网的支柱上固定了路标,理想情况下,通过识别路标上的编号可以从数据库中确定路标的位置,进而对列车定位;但是由于列车速度较快以及光照不均匀等原因,路标编号大多难以识别,因此本文忽略路标编号,直接对路标进行不加区分的检测,然后使用路标的间距和高度信息辅助惯性导航。路标的间距近似等于接触网支柱的跨距,跨距是保持受电弓和接触网良好接触的重要参数,它的取值有着严格规定[6],在一段距离内是保持不变的。
本文针对高速列车通过隧道的场景,提出了一种跨距与运动约束的惯性导航方法,通过对路标的检测获取跨距信息,并结合列车运动约束,辅助惯性导航得到更精确的定位结果。具体如下:
1)跨距约束与运动约束结合,可对列车形成全方向的约束,提高定位精度;
2)与基于地标点的位置修正方法相比,此方法不需要识别路标编号,计算效率更高,并且对图像模糊不敏感,适用于高速运动;
3)使用改进的卡尔曼滤波方法,滤波时间更新方程与测量修正方程采用相同的计算频率,可减小实时计算负担,有利于高速运动下的组合导航。
1 列车运动约束模型
1.1 运动约束
首先定义本文使用的坐标系,n系代表导航坐标系,坐标轴方向为北东地(NED);m系代表车体坐标系,坐标轴方向为前右下;b系代表IMU坐标系,安装时使其坐标轴方向尽量与m系一致;c系代表相机坐标系,x轴和y轴与相机平面平行,z轴指向相机前方。
陆地车辆在行驶时,如果不发生侧滑和跳动,沿车体系侧向(y轴)和法向(z轴)的速度为0[7],这称为车辆运动约束。运动约束是提高惯导精度的一种常用方法,但由于缺少对前向速度的约束,是一种非完整约束,因此常与里程计组合[8-9]。忽略IMU安装杆臂的影响,这种约束可以表示为
(1)

(2)
(3)
(4)
(5)
其中,[•×]代表向量的反对称矩阵,δθm为安装角误差,由横滚、俯仰和方位安装角误差构成,φn为失准角,δvn为速度误差,可以推导出侧向与法向速度误差为
(6)

1.2 基于ST-EKF的误差状态模型

(7)
这种方法称为状态变换卡尔曼滤波(State Transformation Extended Kalman Filter,ST-EKF),它可以消去系统矩阵中的比力项,避免比力量化噪声的影响,使系统方程更接近线性定常系统,从而降低滤波时间更新方程的计算频率,提高计算效率,避免误差的累计[11-12]。
设导航系下基于ST-EKF的误差状态方程为

(8)
式中,δX为误差状态向量,F为系统矩阵,G为噪声转移矩阵,w为过程噪声向量,它们定义如下
(9)
(10)
(11)
(12)
1.3 运动约束观测模型
将式(7)代入式(6),得ST-EKF下的侧向和法向速度误差为
(13)

(14)
(15)
2 跨距约束模型
2.1 路标检测
图1所示为隧道内的路标示意,路标形状为矩形,并可以反射火车顶部的灯光,因此可以从形状和像素强度2个方面来检测路标,检测的效率和鲁棒性要优于对路标编号的识别。设计的算法主要包括二值化、区域标记和模板匹配等流程,实验表明该算法具有较高的计算效率和鲁棒性。

图1 原始图像(左)与局部放大图像(右)中的路标Fig.1 Landmarks in original image (left) and partially enlarged image (right)
根据路标检测结果,可以计算相机相对路标的距离。设路标在图像中的坐标为zl,在相机坐标系中的位置表示为
(16)
根据相机投影方程为
(17)

(18)
(19)
问题来了,这也是你一生中猝不及防的一跤,你受不了他人的哄笑,但你真的想要同情吗?前者是善意的:你本不该如此,你应该有更好的未来,只因为愚蠢与莽撞,做了可笑的事;后者是更大的善意:你已经尽力了,你不能走得更远,此地就是你的极限。你失败了,因为你不是成功的料,我们原谅你接受你——你真觉得,后面的对待,是你想要的?
需要注意的是,一个路标会被连续观测数帧,可以利用这几帧的观测对路标的位置进行优化[13];并且如果hl未知,也可以在优化中对其进行估计,之后选取一帧用于距离约束即可,此处不再赘述。
2.2 跨距约束观测模型
设列车在2个路标间行进时,INS解算N次,解算周期为T,跨距约束可表示为
(20)

(21)

δZsc=δs=HscδX+υs
(22)
(23)
2.3 滤波流程
根据1.2节中的描述,ST-EKF可通过使用较低的时间更新方程计算频率,提高计算效率,有利于高速运动下的组合导航。实际使用中,时间更新方程与测量修正方程采用相同的计算频率。
当列车在隧道外时,GNSS速度和位置以及运动约束为惯性导航提供观测,使用卡尔曼滤波可以估算安装角。设GNSS速度和位置的误差观测量为δZg,观测方程为
(24)
其中,υgv和υgp是GNSS速度和位置的观测白噪声,Hg是观测矩阵,这里直接写出它的具体形式为[10]
(25)
GNSS与运动约束同步进行测量更新,误差观测量与观测矩阵分别为
(26)
进入隧道后,运动约束周期保持不变继续进行,误差观测量和观测矩阵分别为
δZin/mc=δZmc,Hin/mc=Hmc
(27)
在路标可见时进行跨距约束,误差观测量和观测矩阵分别为
δZin/sc=δZsc,Hin/sc=Hsc
(28)
运动约束与跨距约束在时间上不同步,可以使用序贯滤波的方法对它们进行组合。
3 仿真实验结果与分析
3.1 实验设计
由于隧道内无GNSS信号作为位置基准,为了检验算法的有效性和导航精度,设计了一组基于真实实验数据的仿真实验。其中IMU和GNSS数据来自隧道外高速列车行驶实验,图像数据来自隧道内列车行驶实验,列车行驶速度约为350km/h,轨迹如图2所示,设置仿真场景如下。

图2 高速列车行驶轨迹Fig.2 High-speed train trajectory
首先使用RTS(Rauch-Tung-Striebel)平滑算法计算IMU与GNSS的组合导航结果,作为仿真实验的定位真值,模拟120s的隧道内行驶,这段时间内列车行驶距离约为11490m,也即模拟隧道长11490m。路标跨距为50m,设置第1个路标距离入隧道口10m,然后根据路标跨距设置路标,最终隧道内共有231个路标。之后,根据相机与IMU的时间同步,在每个路标的位置插入4帧包含路标的连续图像,其他位置插入不包含路标的图像。

由于列车高速行驶,传感器时间不对准将会对导航造成较大影响,因此IMU、GNSS与相机采用硬件同步。其中GNSS输出秒脉冲信号,经同步控制器分频后产生所需频率的触发脉冲信号,触发沿按周期对齐。
3.2 实验结果
GNSS和运动约束估计的IMU安装角如图3所示。在列车静止阶段,角度不发生变化;在起步加速阶段,安装角开始变化并逐渐收敛;匀速阶段基本保持不变。另外方位安装角比俯仰安装角的收敛速度慢,这与列车缺少转向机动,惯性导航方位角收敛较慢有关[15]。

图3 IMU安装角Fig.3 IMU installation angle
820~940s断开GNSS,对比纯惯导(Pure INS)、运动约束的惯导(Motion Constrained INS, MC-INS)以及跨距和运动约束的惯导(Catenary Span and Motion Constrainted INS, CSMC-INS),图4和图5所示为三种算法在无GNSS时的北向和东向位置误差,表1列出了最大位置误差的值。

图4 北向位置误差Fig.4 Northward position error
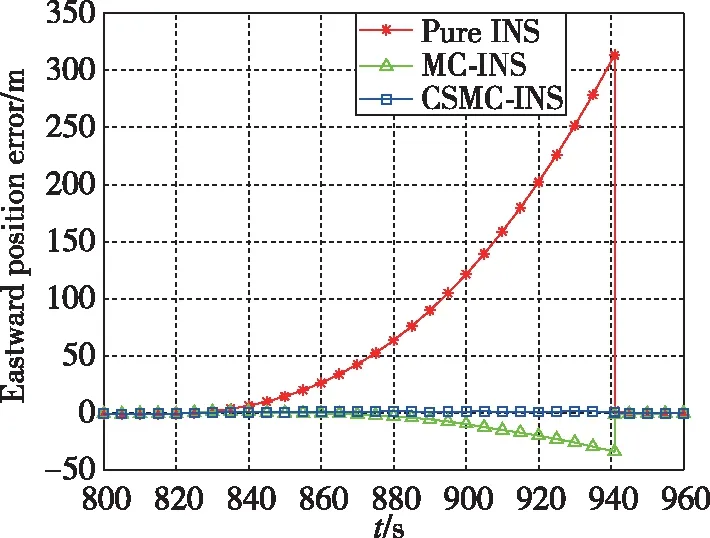
图5 东向位置误差Fig.5 Eastward position error
表1 不同算法的最大位置误差
Tab.1 Maximum position error of different algorithms
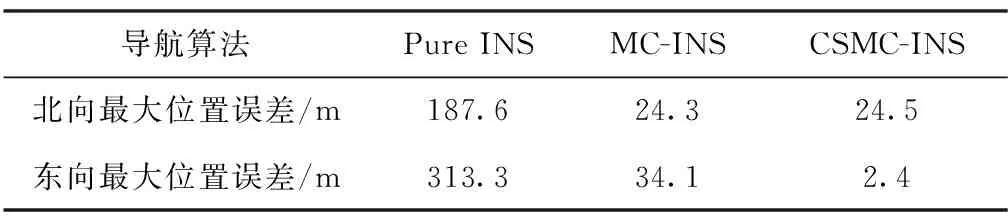
导航算法Pure INSMC-INSCSMC-INS北向最大位置误差/m187.624.324.5东向最大位置误差/m313.334.12.4
从图4、图5和表1中可以看出,运动约束明显减小了北向和东向的位置误差。由于列车近似东西向行驶,北向位置误差的减小是易于理解的,而东向位置的减小是由于运动约束使前向速度的误差增长更慢[7]。在运动约束的基础上添加跨距约束后,北向位置误差基本不变,而东向位置误差进一步减小,定位精度得到提高。
为了检验CSMC-INS对位置误差的校正,画出位置误差的发散情况,如图6所示,这里为了使效果更加明显,设置了每2个路标有1个路标不被识别,也就是每100m提供一次观测。纯惯导的位置误差在5s内发散14m,平均发散2.8m/s。使用CSMC-INS后,当列车在2个路标之间时,误差发散0.48m,平均发散0.48m/s,这说明经过约束后的导航参数估计值更为准确。在经过测量更新后发散误差减小至0.07m,说明CSMC-INS可以有效抑制误差发散,但同时仍然会存在误差累计。

图6 水平位置误差发散情况Fig.6 Horizontal position error divergence
根据以上实验结果的分析,可以确定本文提出的CSMC-INS算法在GNSS缺失时,可以有效抑制INS误差的发散,提高列车在隧道内的定位精度。
4 结论
本文针对高速列车通过隧道的场景,基于对隧道内路标的识别,提出了一种跨距和运动约束的惯性导航方法。该算法分析与实验结果表明,跨距和运动约束可以抑制惯性导航误差的发散,显著提高了列车在隧道内的导航定位精度,在通过11.5km的隧道后,水平定位误差约为25m,定位精度优于3‰行程,具有实际应用价值。
附录

(29)
