航空器飞行轨迹表示方法及其应用
2020-06-06赵元棣付云峰吴佳馨
赵元棣,付云峰,吴佳馨
(1.中国民航大学空管基地,天津 300300;2.中国民航大学空中交通管理学院,天津 300300)
随着中国经济的不断发展,中国民航产业规模日渐庞大,增长迅速,积累的运行数据也随之增多。在实际运行中,每天每个航班都会产生一条独有的飞行轨迹,空管自动化系统以固定时间间隔(一般为4 s或1 s)将这条轨迹上的各点记录下来。因此,空管单位每天产生的飞行轨迹数据量十分巨大,传统的数据存储和处理方式已经不再适用,如何对大规模的飞行轨迹数据进行规则化表示,从而减少内存占用成了亟待解决的问题。
目前围绕航空器飞行轨迹数据处理的研究已经成为民航空管领域的热点。在优化设计方面,康瑞等[1]在综合航空器飞行性能和飞行计划、实时监视数据的基础上,对航空器飞行轨迹、姿态进行推算;杨奕堂[2]基于改进型卡尔曼滤波进行空管雷达数据滤波,提高了空管二次雷达对数据的处理能力;吕开妮等[3]采用自适应遗传算法研究了民航客机爬升段的飞行轨迹优化问题,提高了发动机利用效率,减少了燃料消耗,降低了飞行成本。在模拟仿真方面,曹文锋[4]提出一种新的改进蚁群算法,用于规划航迹,在最优路径搜索能力和稳定性上均有提升;李新胜等[5]根据飞行计划中航路点位置相互之间的关系和飞机实时速度和位置等信息,生成BéZier曲线控制点后得到飞机航迹曲线。由此可见,目前前人研究大多是基于海量飞行轨迹数据而展开的,因此数据质量与规模对于计算的速度和准确性起着至关重要的作用。
在分析飞行轨迹数据特征的基础上,利用不同方式对轨迹数据进行重采样和重构,在保留原始轨迹运动特征的前提下,大幅度减少数据规模。此外,基于固定点数采样结果,采用层次聚类法进行轨迹聚类分析,并识别盛行交通流和异常轨迹,验证该方法的应用价值。
1 飞行轨迹的重采样
设某条飞行轨迹由n个三维轨迹点组成,表示为(p1,p2,…,pn),其中每个轨迹点的三维坐标为pi=(xi,yi,zi),i=1,2,…,n。
1.1 等间隔采样
设采样间隔为a(又称采样率为1/a),即从第一个点开始,每隔a个点采样一个轨迹点,则采样后的轨迹点可表示为(p1,p1+a,…,p1+sa),其中s为采样点的个数。通过调整采样间隔的大小,可以控制重采样后轨迹点的疏密程度。图1(a)所示为对由360个轨迹点组成的飞行轨迹进行间隔为3的重采样结果,图1(b)所示为间隔为10的重采样结果,采样后的点数分别为120、36个。由图1可以看出,采样间隔越小,重采样后轨迹点数越多,保留原始轨迹的运动特征也越多,但占用存储空间也越大;采样间隔越大,重采样后轨迹点数越少,占用存储空间越小,但对原始轨迹运动特征的保留程度越低,主要体现在细节处(如转弯点、高度改变点等)精确度不足。

图1 等间隔采样Fig.1 Equal interval sampling
1.2 固定点数采样
设采样点数为m,即用m个采样点表示原始轨迹。保持首尾轨迹点不变,根据飞行轨迹总距离和采样点数计算参数节点为k/m(k=1,2,…,m)所对应的轨迹点即为采样点qk(k=1,2,…,m),则重采样后的飞行轨迹可表示为(q1,q2,…,qm),其中q1=p1,qm=pn。需要说明的是,该方法在采样过程中可能会产生新点。通过调整固定点数的大小,可以控制重采样后轨迹点的疏密程度。图2(a)为对由450个轨迹点组成的飞行轨迹进行采样点数为50的重采样结果,图2(b)为利用采样点重构的飞行轨迹。图2(c)、图2(d)分别为采样点数为100和200的结果。由图2可知,随着采样点数的增多,重构轨迹与原始轨迹的相似度在增加。
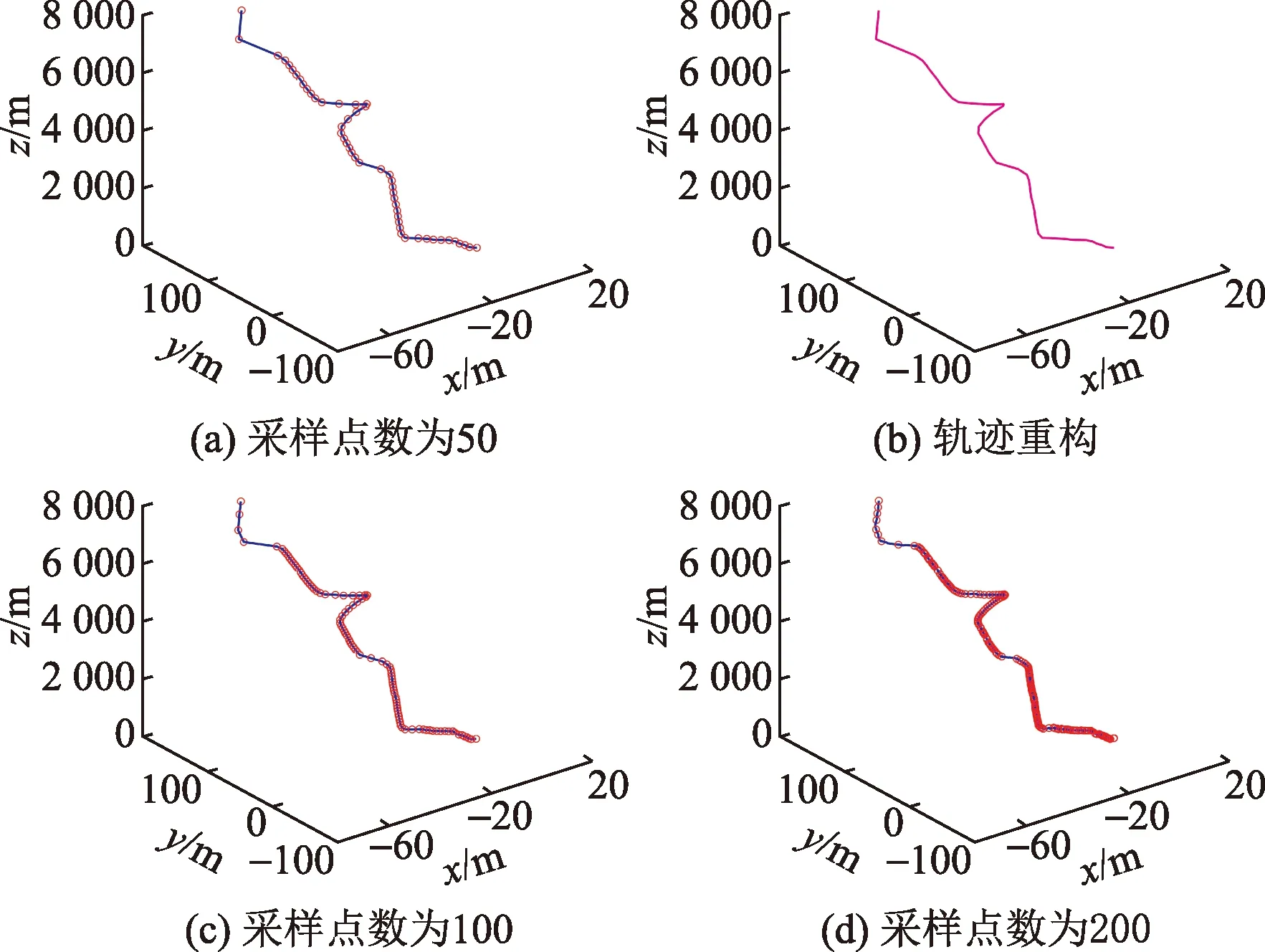
图2 固定点数采样Fig.2 Fixed-points sampling
1.3 自适应采样
1.3.1 根据飞行状态自适应采样
飞行轨迹包含平飞段和上升下降段,其中平飞段轨迹可以看作是一条直线,运动特征变化较少,故可以适当减少采样点数;而上升下降段航空器的高度变化频繁,应保留较多的采样点数以保证采样后不会损失其运动特征。利用轨迹数据中的飞行高度变化判断航空器的飞行状态,在各个飞行状态中采用等间隔采样,进而实现全轨迹的自适应采样。
图3所示的采样率分别为平飞段1/10、1/30、1/10、1/10,上升下降段1/10、1/10、1/20、1/40。
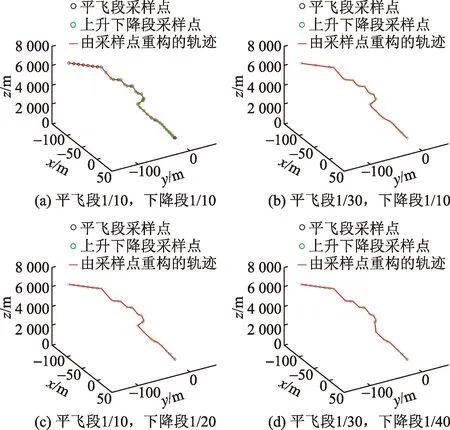
图3 根据飞行状态自适应采样Fig.3 Flight status-based adaptive sampling
通过对比发现,改变平飞段采样率,重构轨迹并不会发生明显变化[图3(a)、图3(b)],即平飞段采样点数的减少并不会明显减弱对原始轨迹的保真程度。而改变上升下降段采样率,重构轨迹会发生明显变化[图3(a)、图3(c)、图3(d)],即上升下降段采样点数的多少会对原始轨迹的保真程度产生较大影响。因此,采样时应适当减少平飞段采样点数,并保留较多的上升下降段采样点数,以保持原运动特征。
1.3.2 根据转弯状态自适应采样
航空器在飞行过程中会发生转弯等操作,且转弯过程与高度无关,故只对二维轨迹进行分析。二维轨迹包含直飞段和转弯段,如前所述,直飞轨迹可以看作一条直线,采样点数可以适当减少;而航空器在转弯时运动特征发生改变,应保留较多的采样点数。利用轨迹数据中相邻轨迹点的位置判断航空器是否处于转弯状态,在各个飞行状态中采用等间隔采样,进而实现全轨迹的自适应采样。
利用第i个、第i+3个、第i+5个点的位置判断第i+5个点是否处于转弯状态,计算第i+5点到第i个和第i+3个点所在直线的距离:
(1)
式(1)中:(xi,yi)、(xi+3,yi+3)、(xi+5,yi+5)分别为第i个、第i+3个、第i+5个点的横纵坐标。
若d大于指定阈值ε,则判断第i+5个点为转弯点。图4(a)、图4(b)分别为当ε=0.2、ε=0.5时的自适应采样结果,采样率均为1/30;图4(c)为由图4(b)中采样点重构的轨迹。此外,尝试仅对转弯处进行重采样,重构的轨迹如图4(d)所示。

图4 根据转弯转态自适应采样Fig.4 Turn status-based adaptive sampling
由图4可知,随着的增大,采样点数减少,对轨迹转弯处运动细节的保真程度降低。通过对比在直飞处采样和仅在转弯处采样两个结果[图4(c)、图4(d)],发现仅在转弯处采样,同样能很好地保持原始轨迹的运动特征,不会过多损失细节。
2 基于傅里叶描绘子的轨迹重构
傅里叶描绘子是一种基于频域变换的形状表示方法,是目前形状表示方法中应用最多的描绘子之一,具有计算简便、鲁棒性高、抗噪性好、形状分辨能力强等特点。其基本思想是:将轨迹曲线表示为一维轮廓线函数,则相对于轨迹上的某一固定点来说,轨迹上的一个动点的坐标变化是一个周期函数,可以利用傅里叶级数展开表示,傅里叶级数中的系数是直接与轨迹曲线的形状有关的,称为傅里叶描绘子[6]。
采用基于物体轮廓坐标序列的傅里叶描绘子,它具有最佳形状识别性能,能够很好地识别轨迹形状并提取特征。设一条由K个点组成的二维轨迹(p1,p2,…,pK),其中每个轨迹点的坐标为pk=(xk,yk),k=1,2,…,K。将每个轨迹点用复数表示为s(k)=xk+jyk,k=1,2,…,K。则离散傅里叶变换为
(2)
式(2)中:u=1,2,…,K;复系数a(u)就是傅里叶描绘子。
选取频域中的低频信息,并利用傅里叶逆变换对原始轨迹进行重构:
(3)
式(3)中:k=1,2,…,K;T为傅里叶描绘子数量,决定保留细节的程度,T越大,保留的细节就越多,这是因为低频分量决定轨迹整体的形状,高频分量描绘轨迹的细节[7]。
2.1 两端补点法轨迹重构
由于傅里叶描绘子大多应用于闭曲线,因此需要在轨迹两端人工补点,防止重构后的轨迹在两端出现较为严重的震荡现象。
首先在原始轨迹两端沿着其延伸方向分别补上若干虚拟轨迹点(各200个点),使其向两端延长,接下来对这条延长轨迹利用傅里叶描绘子进行重构,最后再分别剔除轨迹两端的补点,得到最终的重构轨迹。
图5(a)为重构轨迹和原始轨迹对比图,不难看出,重构效果较好。图5(b)和图5(c)分别为T=400、T=200的重构轨迹图,可以发现重构轨迹保留了绝大部分原始轨迹的特征。进一步对比发现,图5(b)由于选取的傅里叶描绘子数量较大,使得其重构轨迹在细节处相比图5(c)和原始轨迹更为接近。

图5 两端补点法轨迹重构Fig.5 Trajectory reconstruction by adding end points
2.2 半圆补点法轨迹重构
为了使飞行轨迹成为一个闭曲线,首先将原始轨迹的首尾两个轨迹点相连,得到一条直线段。以该线段的中点为圆心,该线段的长度为直径,且以原始轨迹首尾轨迹点作为起始点和终止点,补充半圆轨迹,与原始轨迹两端衔接,如图6所示。

图6 半圆补点Fig.6 Semi circle by adding points

图7 半圆补点法轨迹重构Fig.7 Trajectory reconstruction by adding semi circle points
图7(a)为原始轨迹,图7(b)~图7(d)分别为T=200、T=100、T=50的重构轨迹。由图7可知,T=200、T=100的重构轨迹对原始轨迹的运动特征保留得较为完整,但随着傅里叶描绘子数量的减少,重构效果变差,主要体现在重构轨迹的光滑度下降,轨迹两端出现震荡现象,如图7(d)所示。
3 基于固定点数采样的轨迹聚类
聚类分析是把一组数据按照相似性和差异性分成几个类别,其目的是使得属于同一类别的数据间的相似性尽可能大,不同类别的数据间相似性尽可能小。对飞行轨迹进行聚类分析可以从庞杂的航空器飞行轨迹中有效识别盛行交通流和异常轨迹,提取空中交通流量时空分布特征,为进离场航线设计和空域扇区划分提供理论依据,目前已经成为空管数据处理领域的研究热点[8-10]。
利用固定点数采样方法对轨迹簇中的每条轨迹进行重采样,得到相同规模的轨迹数据,然后采用基于平均距离法的层次聚类法对轨迹簇进行聚类,结果如图8所示,其中同类的轨迹用相同颜色来表示,共有5类。紫红色、绿色和蓝色的轨迹簇分别对应于正北、东北和西南三个不同方向的盛行交通流。红色和黑色的轨迹数目较少,是因为其在特殊情况下(如恶劣天气、流量控制、间隔调配等)由管制员对航空器进行引导的轨迹,视为异常轨迹。

图8 基于固定点数采样的轨迹聚类结果Fig.8 Trajectories clustering result based on fixed-points sampling
4 结论
通过分析航空器飞行轨迹数据的特征,围绕飞行轨迹的有效表示方法,及其在轨迹聚类中的应用展开了研究,得到以下结论。
(1)等间隔采样和固定点数采样,随着采样间隔的减少或采样点数的增加,使得重采样后轨迹点越来越密集,对原始轨迹细节的保留程度越好,但占用存储空间也越多。
(2)自适应采样,通过在平飞(或直飞)段减少采样点数目,平衡了减少轨迹点数目与保留原始轨迹运动特征两者之间的关系,实现了利用较少轨迹点保留较多运动特征的目的。
(3)利用傅里叶描绘子重构轨迹可以有效提取轨迹的低频分量,重现轨迹整体形状,通过增加傅里叶描绘子数量,提升对轨迹运动细节的保真程度。
(4)在固定点数采样的基础上,对采样后的轨迹簇进行层次聚类,得到令人满意的聚类结果,有效提取盛行交通流和异常轨迹。
未来的研究工作包括进一步优化采样算法,更好地保留原始轨迹的运动特征,以及面向飞行全过程的飞行轨迹表示方法。
