多UUV 搜索海底声信标任务规划方法
2020-06-03张宏瀚郭焱阳许亚杰李本银严浙平
张宏瀚,郭焱阳,许亚杰,李本银,严浙平
哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001
0 引 言
飞机、潜艇在海上失事后,为了查清失事原因需要在广阔的海域中快速找到声信标(俗称“黑匣子”)。声信标入水后即可发出特定频率的声信号,但声能量在水中衰减较快,且声信标工作寿命有限,因此提高对声信标的搜索效率很有必要。目前,常用的搜索方式有母船携带拖曳声波定位仪搜索以及水下无人航行器(Unmanned Underwater Vehicle,UUV)携带声呐搜索,由于前者的搜索方式在人力、物力和时间等方面耗费较大,已渐渐被UUV 取代。
尽管UUV 在某一特定海域内执行海底声信标搜寻等任务优点突出,但UUV 自身搭载搜索设备及续航能力的有限性,会导致任务执行效率较低。为了提高搜索效率,人们利用多个UUV组成UUV 集群代替单个 UUV 来执行任务。比如在马航MH370 航班的搜索工作中,采用了美国“蓝鳍金枪鱼”(Bluefin-21)自主式水下航行器。Bluefin-21 能够利用声呐和摄像机下潜搜寻,可谓黑匣子探测利器,但其作业速度较慢,每天只能搜寻一个操场大小的任务区域,该搜索效率意味着UUV 搜寻1 km2的海域需要30 天。但MH370的拟搜寻范围为600 km2,因此,采用UUV 集群代替单个UUV 执行任务很有必要。采用UUV 集群进行海底声信标搜索,不仅可以提高搜索效率,还可以扩大搜索范围,使UUV 发挥更大的作用。
为提高UUV 集群对海底声信标的搜索性能,需对集群队形进行优化。但是,目前在UUV 集群队形设计方面的研究较少,大多数的研究为传统队形在航行过程中的保持问题。如白锐[1]针对UUV 集群队形的优化控制引入人工势场法,并针对其引力系数和斥力系数的随机选取对UUV 系统稳定性造成的影响展开了研究,提出利用遗传算法优化引力系数与斥力系数,进而实现队形的优化控制。这对多无人机的队形优化研究稍有帮助,但是目前基于无人机集群探测能力进行队形优化的研究主要还是对一些经典的防空队形建立指标体系,通过层次分析等方法建立评估模型,进而对不同队形下的探测性能进行评估对比,得到指导性的集群队形设置原则。李浩等[2]对典型的防空队形(如菱形、人字形、梯形等)予以分析,建立了编队防空队形综合评判的指标体系,并应用模糊层次分析法建立了编队防空队形优选模型,初步解决了编队防空队形优选问题。
为了克服传统队形优化方法难以充分考虑不同UUV 搜索性能的差异且无法给出集群中各UUV 最优相对位置坐标的缺陷,本文将利用集群中各UUV 所载被动声呐[3]的搜索能力指标函数,采用蒙特卡罗方法[4]随机模拟海底声信标的坐标位置,在任务区域建立集群搜索能力函数,从而得到本次优化任务的优化目标,进而根据UUV实际执行任务时的队形要求,建立本次优化的约束条件,整合得到基于海底声信标搜索概率最大化的集群队形优化模型[5-9]。鉴于本文的主要研究内容为队形优化问题,而不是编队控制问题,因此不妨假设在得出优化队形之后,多UUV 在航行过程中能够按此队形进行搜索,且声信标的位置设定是随机分布于任务区域内的。因此,针对多UUV 动态搜索过程中的队形优化问题可以转换为搜索过程中的布放优化问题。
本文将采用遗传算法对队形优化模型进行参数优化。首先,设定合理的目标函数,然后改进传统的遗传算子,当目标函数的值达到设定标准后,取出相应的参数值完成值的选择。
1 队形优化问题分析
队形设计是整个多UUV 任务规划中需要解决的首要问题。合理的队形可以在UUV 携带有限能源的条件下提高指定区域内目标被搜索到的概率。在设计队形过程中,除了要考虑UUV 之间的安全距离,还要考虑任务需求、UUV 间信息交换的系统结构以及多UUV 所处的任务环境。本文将利用各UUV 所载被动声呐的搜索性能函数Pi(s),i=[0,n],采用蒙特卡罗方法随机模拟海底声信标的坐标位置,在任务区域建立多UUV搜索目标函数F,从而得到本次优化任务的优化目标,然后根据UUV 实际执行任务时的队形要求建立本次优化的约束条件,整合得到基于海底声信标搜索概率最大化的多UUV 队形优化模型。以函数F为优化目标,根据实际队形的情况建立约束条件,即可得到基于多UUV 搜索能力最优的多UUV 队形优化模型。本文将应用遗传算法[10]求解带约束的优化问题,解出搜索概率最大化时各UUV 的位置坐标,进而得到UUV 执行任务的队形分布,为灵活高效构建合理的多UUV队形提供方法指导。基于海底声信标搜索概率优化的多UUV 队形优化分析模型建立在以下条件之上:
1) 蒙特卡罗方法给出的海底声信标坐标位置是被多UUV 搜索到时的坐标位置,该位置随机分布且为瞬时状态值,因此本文不考虑UUV自身的航行速度;
2) 多UUV 在执行搜索海底声信标任务过程中的队形基本保持不变;
3) 多UUV 的通信网络是完整的,只要任意一艘UUV 发现海底声信标则认为搜索任务完成;
4) 忽略多UUV 内部各UUV 搜索声呐的相互干扰;
5) 本次优化任务的约束条件由多UUV 内部各UUV 航行时的最小避碰距离及任意2 个UUV保持通信的最大距离构成。
2 问题建模
2.1 声信标发声模型及任务环境模型
首先,给出黑匣子发声原理的相关分析:当黑匣子沉入水底时,内部所带的声学定位信标便会自动激活,并发射37.5 kHz 的高频脉冲信号,该脉冲信号的传输距离与海洋环境有关,理论上的传输范围为2~5 km。考虑到声能量在水中的衰减,以及海洋环境的恶劣影响,球面波传播损失TL主要由声衰减以及声吸收组成,表达式为TL=20lgr+αr,其 中,r为 传 播 距 离,km; α在0.5~1 000 kHz 频率范围内的近似表达式为α=0.05f1.4,f为黑匣子发出的高频脉冲信号的频率。经计算,可得2 km 的传播损失为22.0 dB。本文将黑匣子的发声范围设定为2 km,加之假设黑匣子已经沉入海底,那么黑匣子的发声范围如图1 所示。

图 1 黑匣子球面发声波示意图Fig. 1 Spherical vocal wave of black box
接着,对黑匣子所在区域建立合适的数学模型(图2)。假设待搜索海域为一个矩形区域,区域内包含有一个圆形的黑匣子发声区域,该圆是任务区域平面与黑匣子发出的球状波的相交面。

图 2 任务区域模拟图Fig. 2 Mission area simulation
2.2 UUV 信息交互模型
UUV 间的信息交互功能是成功实现UUV 协同工作的核心要素,但目前的水下通信技术仍有许多问题亟待攻克。根据对多UUV 指定区域中海底声信标搜索问题的分析,本文采用主UUV对各从UUV 进行统一规划,且每艘UUV 需具备一定的自主决策能力。为保证搜索任务的高效性和及时性,需要保证UUV 系统信道畅通,并且通信延迟较低,以便及时反馈信息,为中央节点的规划、UUV 个体决策提供依据。本文将UUV 间的信息传输理想化处理,忽略了通信延迟对协同任务的影响。在此基础上,多UUV 协同系统中的每个UUV 个体都将以“广播”的形式将信息发送给其他UUV,该过程即称为全局信息条件下的协同控制(图3)。
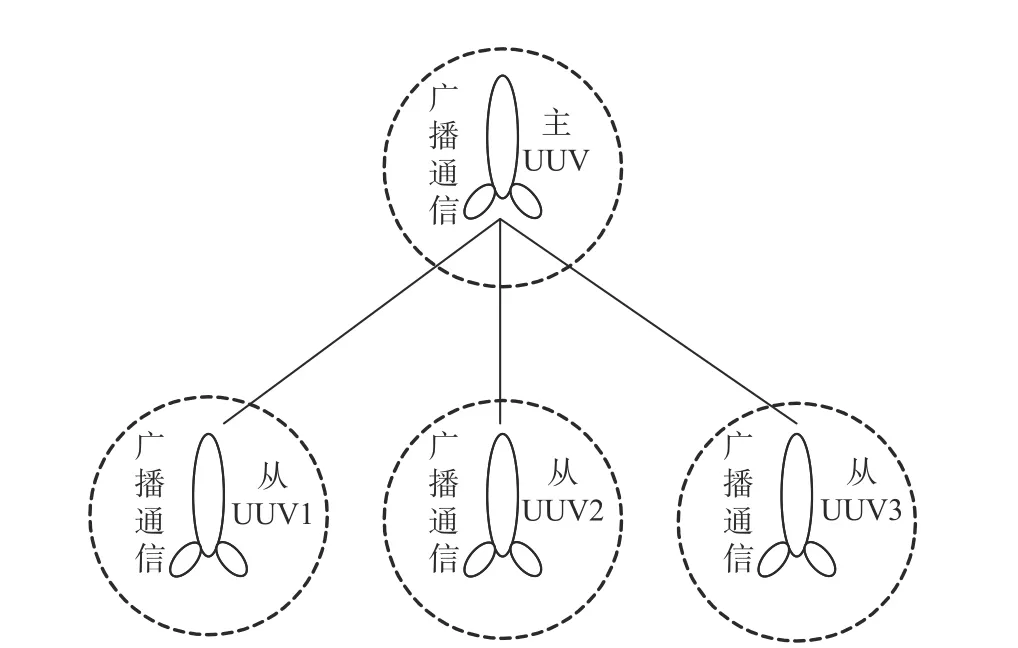
图 3 UUV 信息交互模型拓扑结构Fig. 3 Topological structure of information interaction model
2.3 优化函数模型
队形优化的目的是使目标函数F的值达到最大。在已知主UUV 与各从UUV 的搜索性能函数Pi(s),i=[0,n]以及任务海域大致情况的前提下,需要首先确定目标函数F的表达形式,分析步骤如下文所述。
当多UUV 航行时,需要保持安全距离以避免碰撞,避碰距离一般取为2 倍艇长,参与MH370搜救工作的Bluefin-21 型UUV 机身长度约为5 m,所以本文将最小航行避碰距离设置为10 m。根据搜索任务概况,可以确定任务中各参数的具体取值。以 0#主UUV 为坐标原点建立平面直角坐标系,将各UUV 的位置表示为(xi,yi),其中(x0,y0) =(0, 0)。对于确定的多UUV 的距离范围,根据任务海域的大致情况,分别模拟产生NP个目标坐标点 (xj,yj), 其中j=[1,NP], 从而i#UUV 对目标在模拟点 (xj,yj)的发现概率(图4)为中,种群规模通常与问题维数有关,通常设置为其3~5 倍,本文中为4 维优化,因此种群规模可选为40。预实验表明,遗传算法能够有效地加快优化过程的收敛速度,当迭代次数到达100 次左右时,收敛效果达到理想状态。因此,本文中迭代次数设为200。利用Matlab 编程实现上述遗传算法对以上问题的求解,求解结果如表2 所示。


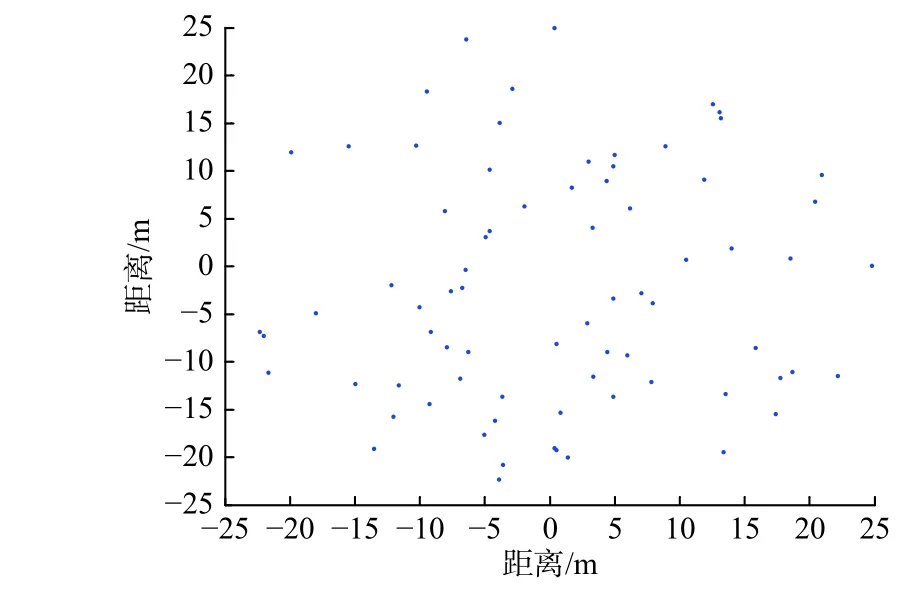
图 7 蒙特卡罗法模拟75 个目标位置图Fig. 7 The simulation of 75 target positions with Monte Carlo method
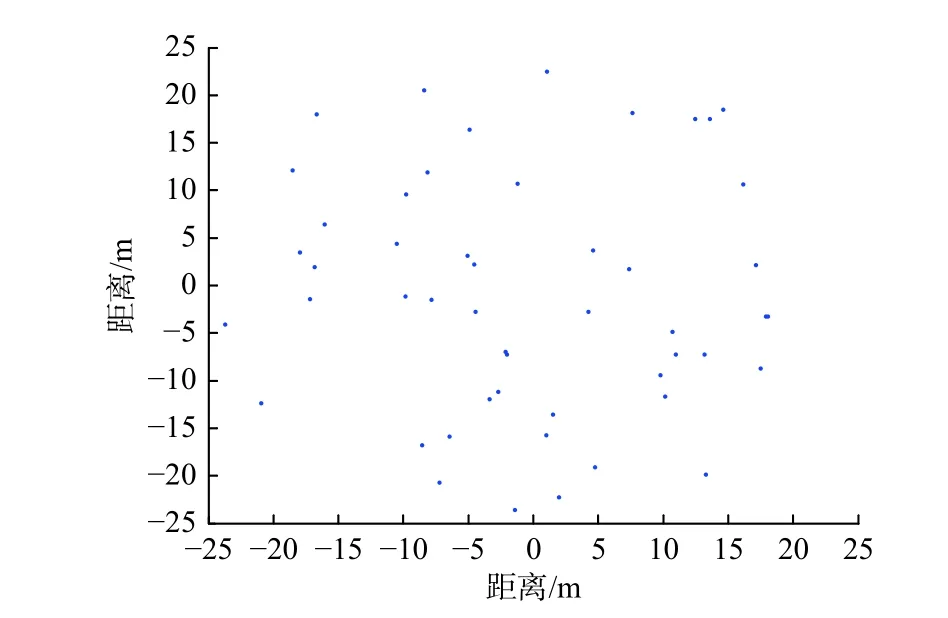
图 8 蒙特卡罗法模拟50 个目标位置图Fig. 8 The simulation of 50 target positions with Monte Carlo method

表 2 实验结果数值表Table 2 Target points experimental results


图 9 100 个目标点优化队形结果图Fig. 9 The optimized formation results of 100 target points

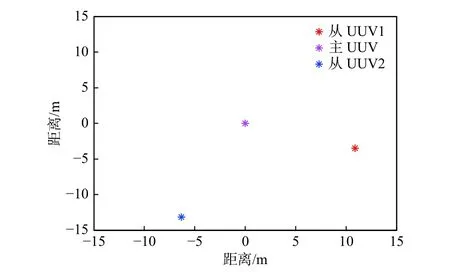
图 10 75 个目标点优化队形结果图Fig. 10 The optimized formation results of 75 target points

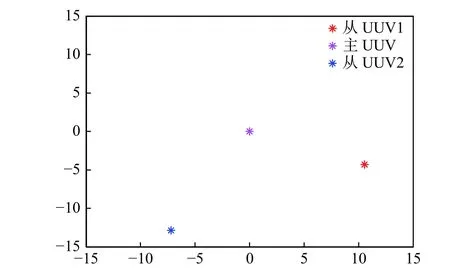
图 11 50 个目标点优化队形结果图Fig. 11 The optimized formation results of 50 target points
由图9~图11 可知,该最优方案与人字队队形相近,不同数量目标点情况下所得队形不同,可通过各UUV 坐标值对优化结果进行验证。经验证,该最优方案符合实际情况并满足约束条件。最优解过程如图12 所示。
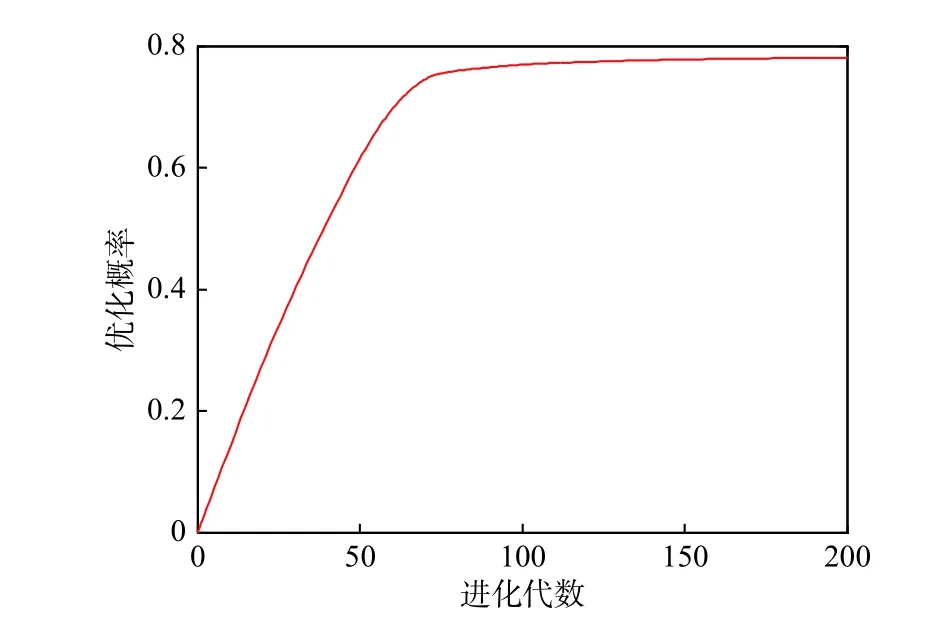
图 12 优化过程示意图Fig. 12 Schematic diagram of optimization process
本仿真是在安装有Matlab2014b 软件、CPU为英特尔core i5-8250U 的计算机上进行的。在100,75 和50 个目标点的情况下分别进行了10 次仿真实现,每次消耗的时间如表3 所示。在100 个目标点情况下,最短耗时为27.55 s,最长耗时为31.50 s,耗时区间为[27.55, 31.50],平均耗时为29.76 s;在75 个目标点情况下,最短耗时为28.21 s,最长耗时为30.34 s,耗时区间为[28.21, 30.34],平均耗时为29.24 s;在50 个目标情况下,最短耗时为27.84 s,最长耗时为29.04 s,耗时区间为[27.84,29.04],平均耗时为28.46 s。从仿真实验结果可以看出,100 个目标点情况下平均耗时最长,50 个目标点情况下平均耗时最短。

表 3 100,75 和50 个目标点情况下的耗时表Table 3 Time consuming in the case of 100, 75 and 50 target points
为证明本文所求解优化队形的有效性,利用Matlab 编程对多UUV 海底声信标搜索任务进行了仿真实验,将图9 所示的100 个目标点优化队形与传统优化队形(横一字形、纵一字型、三角形等)进行了对比,给出了2 500 m×1 000 m 的任务区域,初始位置在原点。根据上述队形开展声信标搜索任务,并使各UUV 在航行过程中保持队形一致,各队形下UUV 的航行轨迹如图13~图16所示,搜索结果对比如表4 所示。
由此仿真图像可以看出,多UUV 从原点出发,航行过程中保持此优化队形完成任务,通过轨迹上的短横线可以看出航行过程中队形的保持情况。本文的验证案例采用的是 “割草机式”搜索轨迹,按照此优化队形进行全覆盖搜索不仅可以使多UUV 具有较高的搜索概率,还可以保证最大限度地减少搜索盲区,即便海底声信标的位置处于搜寻区域的边界点,该搜索队形也能保证将其搜索到。
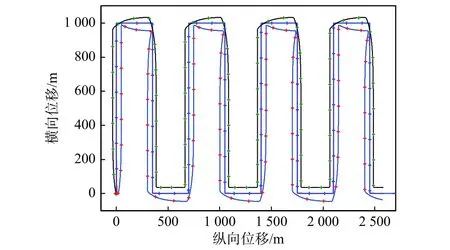
图 13 优化队形区域搜索图Fig. 13 The zigzag area search for optimized formation

图 14 横一字形区域搜索图Fig. 14 The zigzag area search for single horizontal formation
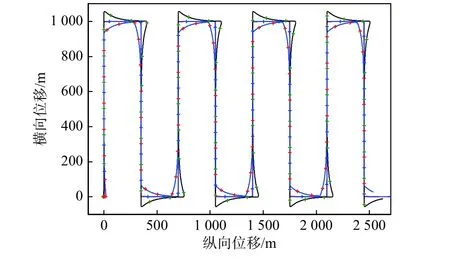
图 15 纵一字形区域搜索图Fig. 15 The zigzag area search for single vertical formation
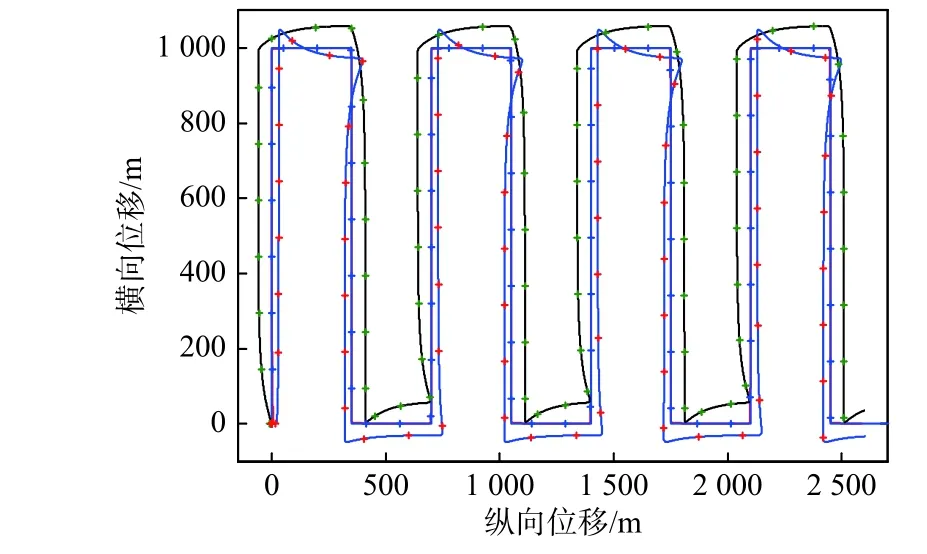
图 16 三角形区域搜索图Fig. 16 The zigzag area search for triangular formation

表 4 队形方案对比分析表Table 4 Comparative analysis of formation plans
5 结 语
本文为提高多UUV 对海底声信标的搜索性能,对多UUV 队形进行了优化。首先,利用多UUV 中各UUV 所带被动声呐的搜索概率—距离实验数据拟合函数,建立多UUV 搜索能力函数,并对其进行优化;其次,建立约束条件,约束条件根据具体队形建立;再次,在保证多UUV 搜索能力最大化的基础上进一步得到队形优化模型;最后,利用遗传算法进行模型优化。该研究方法能给出合理的队形优化方案并有效提升多UUV 的海底声信标搜索性能,可为多UUV 队形优化问题提供参考。
在下一步的研究中,还需全面考虑遇到障碍物或某个UUV 发生故障时UUV 的队形变换问题,以及各UUV 间所载不同声呐类型同时工作时的队形设计问题,提高其普适性。
