工业无线遥控技术在煤矿采掘设备中的应用*
2020-06-02程凤霞
程凤霞
(中国煤炭科工集团 太原研究院有限公司, 山西 太原 030006)
0 引言
随着采煤技术和方法的演进及煤矿机械研发技术的进步,连续采煤机、掘锚机、掘进机、液压行走支架、支架搬运车等采、掘、支、运类煤矿设备大量应用于煤矿井下,突破了我国传统采煤、掘进的桎梏,实现了综合机械化采煤作业。因为采掘工作面工况危险,视距受限,粉尘、潮湿、坠物、噪声污染等威胁无处不在,因此对行车驾驶室内随机操作工人的生命安全及身体健康造成了很大威胁。现代化采煤技术不仅对煤炭生产的效率提出了要求,也对煤矿井下工作人员的人身安全及职业健康提出了更高要求。对此,一种新型控制采掘设备工作的方式即远距无线遥控操作,近年来被用于煤矿采掘设备电气系统的设计中,并在普通型连续采煤机、薄煤层连采机、掘锚机、巷道掘进机、履带行走式液压支架等工作面设备上得到了成功的应用。工业级遥控装置的使用,不仅达到了煤矿高产高效的目的,也提高了设备操作人员的舒适性与安全性。
1 工业无线遥控技术
在工业无线遥控设备发展初期,只能实现对设备的打开、关闭等简单操作,随着集成电路及微处理器技术的飞速发展,已研发出了手持式遥控装置,其便携性、可靠性更高,操控指令的范围更广;近年来,数字处理技术得到了快速发展,工业无线遥控技术研究也有了新突破,其抗干扰能力逐步提高,安全性、可靠性得到了大大改善,1985年随着模拟控制技术试验的成功,不仅提高了控制指令的分辨能力,而且在该技术应用于无线遥控装置的研发中,还实现了其无线控制,遥控发射机发出的指令能实现对驱动设备动作的比例控制,从而打破了工业无线遥控设备发展初期只能进行开关简单控制的瓶颈。这一历史性的技术突破,全面顺应了现代化采矿发展对采掘设备的技术要求,迅速且广泛地应用在各类采掘设备的电控系统中[1]。
2 采掘设备操作控制方式
2.1 采掘设备传统操作方式
采掘设备在工作面的行走、支护、锚护、掏槽等动作,是由多个操作司机通过安装在设备上的液压手柄、电气操作箱等进行控制的,行走与支护、行走与锚护动作之间存在联动、协调控制。为了保证操作的安全性,操作司机间需要通过喊话系统重复确认已完成的锚护(支护)或行走动作,方能进行下一步的行走或锚护(支护)动作,这加大了设备控制中人的主观控制所占的比重,即不仅增加了误差来源,降低了系统控制的可靠性,还增加了无直接关系系统功能的硬件构成,增加了成本,同时影响了操作司机的健康,而且受视距、噪声等影响,间接影响了操作的准确性、安全性。
2.2 采掘设备新型操作方式
受采掘设备手动跟机操作的局限性,采掘设备的控制方式进行了改进[2-4],即采用有线跟机操作和无线远控操作结合的方式,其中有线操作主要在设备系统检修、整机系统调试时使用,井下工作面主要采用无线遥控操作。
图1为工作原理就是无线遥控装置对采掘设备机构动作的控制,遥控发射机面板发出的控制命令信号,经过发射机内部数字化处理模块、无线发射模块,然后被无线接收模块接收,并通过接收机内置的信息解码器转化为控制系统能够识别的控制信号,经处理后实现对各液压机构的控制。
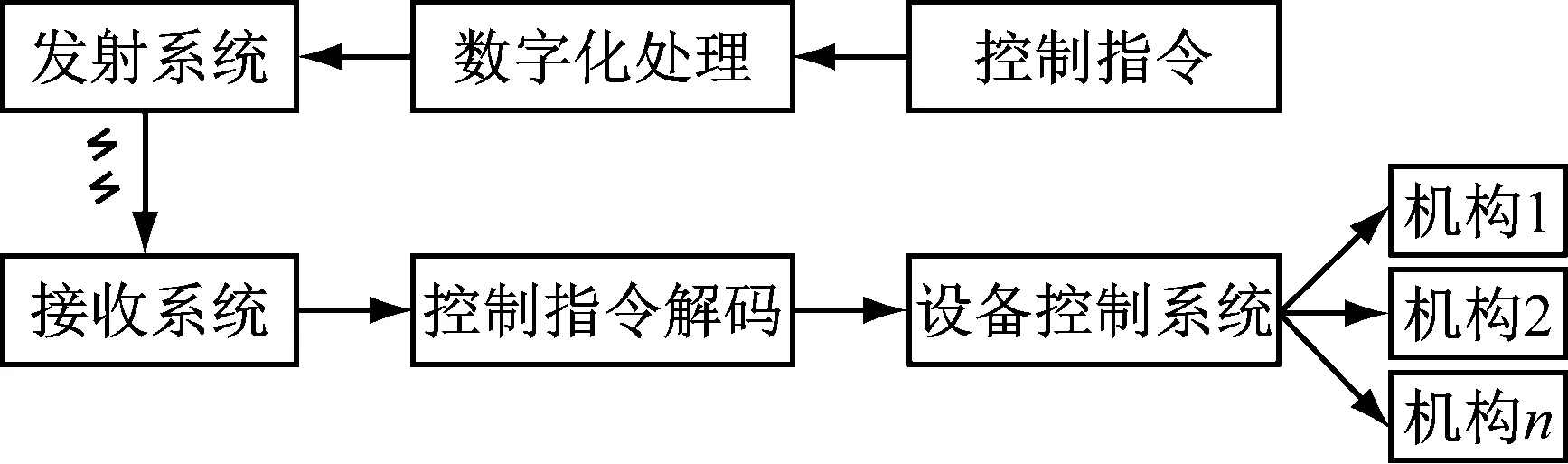
图1 无线遥控装置控制采掘设备的工作原理
3 无线遥控控制系统
3.1 技术参数
由于矿井工作面设备多而复杂,设备间存在相互遮挡,因此无线信号必须穿透障碍物。无线遥控操作就是利用无线信号实现对远方机构的操作,这就决定了采掘设备所用无线遥控装置必须满足信号传输距离的要求,采掘设备的无线遥控装置是用无线电波来传送控制信号的,信号的传输距离远(一般可达到100 m)、无方向性很好解决了工作面控制中的信号传输距离及设备遮挡问题。
为了保证无线控制方式工作的可靠性,太原院采掘设备使用发射、接收模块性能稳定可靠的进口遥控装置,其综合性能指标如表1所示。该无线遥控装置采用滚动编码方式,每次发射后编码自动更换,不仅增强了保密性,而且滚动编码容量大,对码快且误码小。遥控装置在硬件设计上,采用功能模块组合结构,可快速方便地对故障设备的修复、更换。
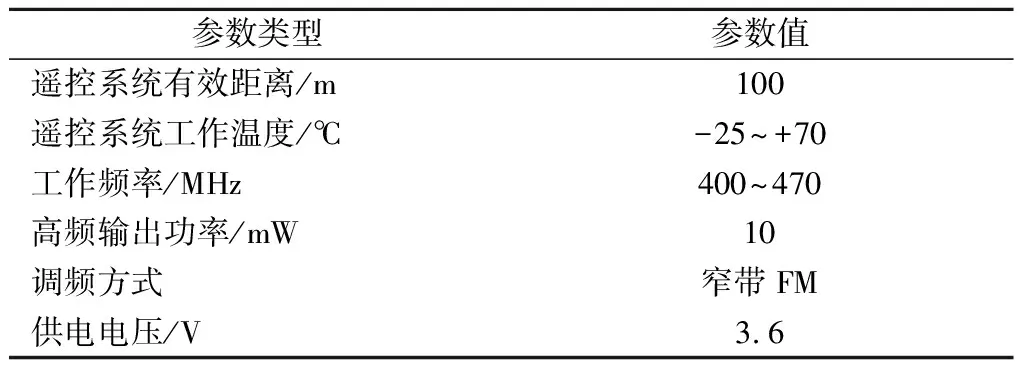
表1 进口无线遥控装置综合性能指标
3.2 遥控发射机
由于煤矿井下的工作环境特殊,因此工作频段相近的无线设备很有可能造成信息的误收,从而造成控制的误动作。对此遥控发射机与接收机的配对,除了频率匹配外,还需采用40亿组永不重复的识别码来保证发射机与接收机配对的可靠性,从而有效地避免其他无线电波的干扰。发射机、接收机的配对原理如图2所示。
3.3 遥控接收机
遥控接收机是遥控命令的中转站,也是连接发射机与设备电气控制系统的桥梁,其内置无线接收模块,接收发射机无线发射模块发出的包含控制指令信息的无线电波,指令被解码后应遵循一定的数据格式存储在发送缓冲区中,其存储格式取决于接收机发送这些指令所用的通信协议,实现遥控系统与控制系统的PLC进行信息传递。而用于采掘设备的无线遥控装置,考虑到通信距离、可靠性、抗干扰能力等关键因素,多采用CAN、CANopen、Modbus、Profibus DP等开放性协议,实现与控制系统信息的透传[5]。图3为基于CANopen协议的某进口遥控接收机的功能结构图。

图2 无线电发射机与接收机配对原理

图3 遥控接收机功能结构
接收机与控制系统通过多芯电缆连接,图3中接收机与控制系统芯线的连接包括了通信线CAN-H、CAN-L,电源线+24V、GND,电动机状态反馈线,以及遥控急停继电器输出的开关量信号线。在遥控器出厂时接入设备系统网络后,因网络中存在其他厂商的应用设备,则会造成通信网络的传输速率不一、节点号重复紊乱,需对总线上所有设备进行重新设置统一的传输速率,以保证总线通信的成功,并对总线所有设备的身份识别ID码统一重新编排以方便网络管理。在CANopen设备网络中,依据各厂商设备对象字典OD中的规约,通过USB/CAN接口向设备发送SDO命令来修改设备配置,以图3中遥控接收机为例,网络节点配置方法如下:
1) CAN总线数据监测设备PcanView正确连接PC电脑与遥控接收机。
2) 接通接收机电源,打开PcanView软件。
3) 按如下格式建立发送数据,且发送次数为1:664 22 01 20 00 02 00 00 00
上述发送数据中,664为目前节点信息区,02为新的节点号。
4) 发送数据成功后,关闭接收机电源后再重新上电,节点号即变为2。
4 无线遥控接收机的防爆设计
煤矿井下用遥控接收机都是通过国家矿用产品安全标志中心检验取得安标证、防爆证的产品,该符合对煤矿井下使用设备的防爆要求,因此需按照GB 3836标准要求,应重新设计满足隔爆性能强度较高的金属材质壳体,并对其封装。一般情况下,防爆壳体尽量设计为非螺纹隔爆面,使加工更简单、方便,且更好地保证防爆壳体的隔爆性能。某型号连采机用遥控接收机防爆外壳如图4所示。由于遥控接收机外接线较少,其隔爆外壳大多设计为契合接收机外形的单腔结构,经引入装置分别引出通信线与其他剩余芯线,与控制系统进行电气连接;因其简单规整的外形特点,遥控接收机隔爆外壳采用螺栓连接的平面接合面,外壳内的空间大小决定了在满足防爆性能的前提条件下,隔爆接合面需满足最小宽度和最大间隙的要求;所选用螺栓的规格及螺栓间隔的设计,需满足在爆炸力条件下每个螺栓的受力不大于螺栓的紧固力矩,以保证隔爆接合面的间隙、盖板不松动。
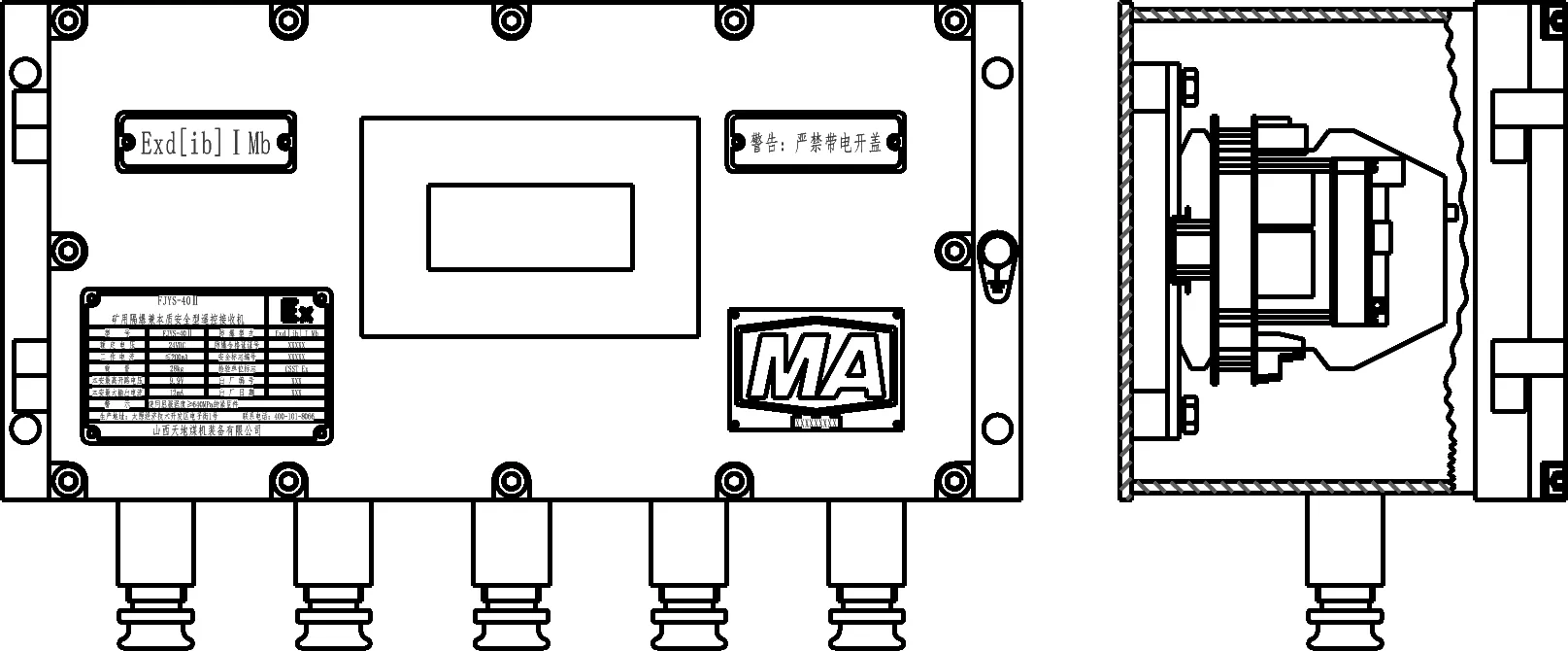
图4 遥控接收机防爆外壳
5 结论
1) 目前无线遥控装置在快速掘进系统、连续采煤机、掘锚机、掘进机、行走支架等采掘设备上广泛应用[6-9],该无线信号实现了对设备的远距离、实时、精准控制,提高了作业效率,改善了工人的作业环境,提高了井下作业的安全系数,效果反响良好。
2) 由于无线遥控技术已日趋成熟,目前正结合互联网、视频监控、激光定位技术等,在致力于远程智能化控制系统的研究上取得了一定的进展,这一研究的成功,必将推动井下无人工作面的目标变为现实。
