基于MC9S12XS128单片机的汽车智能照明系统设计
2020-06-02杨永鑫冯川
杨永鑫,冯川
(滨州学院机电工程学院,山东滨州 256600)
0 引言
现代汽车中,电器设备成本已占到整车成本的30%以上。据统计,汽车上70%的革新来自汽车电子技术及产品[1]。智能照明系统作为汽车电器设备重要的组成部分,关乎车辆夜间行驶的安全性。对于汽车类专业学生而言,掌握智能照明系统组成和工作原理非常重要。开发的汽车智能照明系统能够实现车灯的近远光切换、辅助车灯开闭和转向灯闪烁等功能,对帮助学生理解汽车照明系统的结构和控制过程具有积极的作用。
1 系统工作过程
系统工作过程如图1所示:由安装在车辆时速表的光电开关获取当前实时车速,根据装备在方向盘方向柱内的转角传感器检测汽车转弯时的转向角度,使用红外测距传感器和光敏电阻来共同测量车辆前方障碍物及会车情况;单片机接收并处理以上信号,对车辆的行驶速度、所处路况和光线环境的变化进行判断,驱动各执行机构,实现近远光切换、辅助车灯开闭及转向灯闪烁等功能,实现汽车照明系统的智能化控制。此外,通过检测照明系统中各机构的反馈信号判断系统是否处于正常的工作状态,如出现错误,及时提醒驾驶员进行处理。
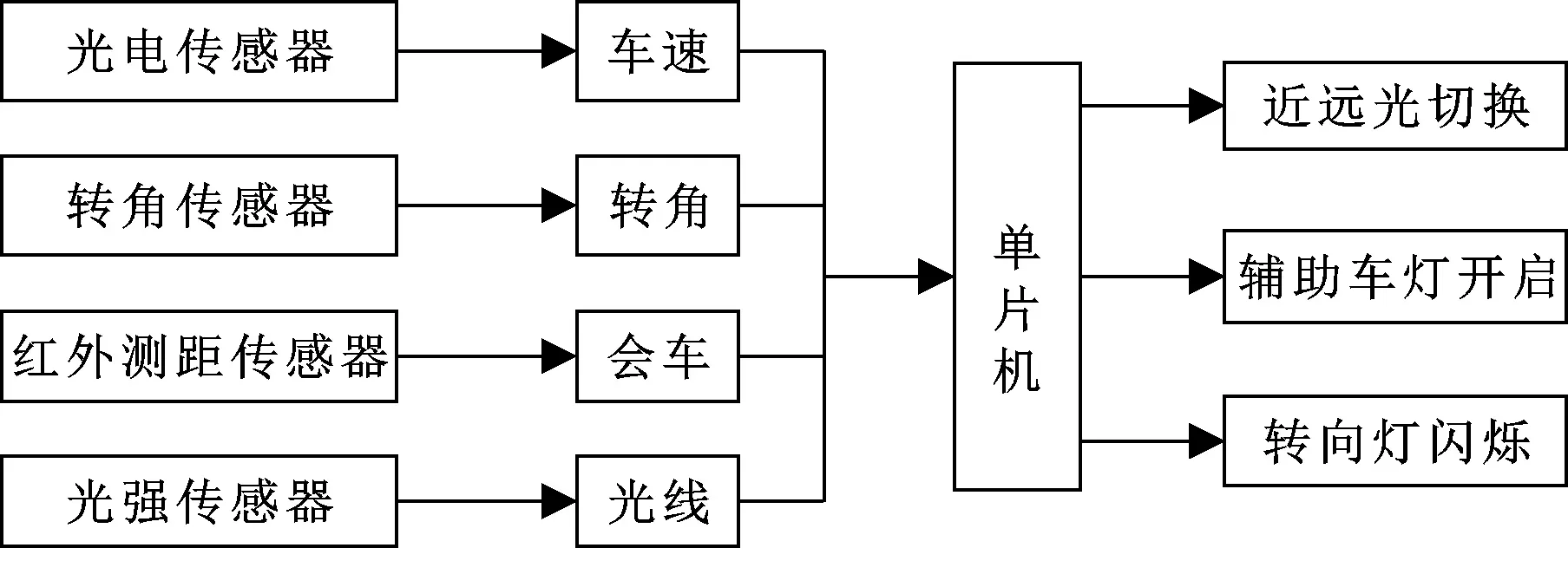
图1 汽车智能照明系统工作过程
2 系统硬件设计
汽车智能照明系统硬件电路主要由微处理器、电源稳压模块、前照灯驱动模块和信号采集模块等组成。
2.1 微处理器
微处理器选用Freescale公司推出的增强型16位单片机MC9S12XS128作为主控芯片,该单片机采用CPU12X V2内核,可运行40 MHz总线频率。片内集成以下资源[2]:
存储器:128 kB Flash,2 kB EEPROM,8 kB RAM;
A/D:16通道模数转换器,可选8位、10位和12位精度;
PWM:8位8通道或16位4通道PWM;
通信:包含2个异步串行通信接口和3个1Mb/s的CAN总线接口;
CRG时钟:具有锁相环、看门狗和实时中断。
2.2 电源稳压模块
系统中单片机和各模块电路工作电路均为5 V,车载蓄电池和交流发电机所提供电压为12 V左右,因此需设计专门的电压转换电路,实现降压稳压功能。
考虑到电源供电电压具有一定波动性,为保证系统稳定供电,选用LM2940作为此智能照明系统电源模块的稳压芯片,以此实现系统供电电压的平稳转换。
LM2940稳压芯片具有以下参数特点[3]:输出电流为1 A;输出电压为5 V;最大输入电压为26 V;具有过热保护、过流保护和短路保护等功能,完全能够满足系统的工作需求。电源稳压模块电路如图2所示。
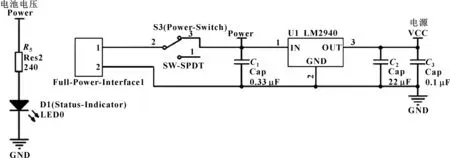
图2 电源稳压模块电路
2.3 驱动模块
智能照明系统转向灯的闪烁由闪光器电路驱动实现。闪光器多谐振荡器又称为无稳态触发器,即其没有稳定的输出状态,只存在两种暂时稳态。当电路处于某一暂时稳态后,经过一段时间可自行触发翻转到另一暂时稳态,两个暂时稳态自行相互转换输出一系列矩形波[4]。
此系统选用555定时器设计的闪光电路如图3所示。
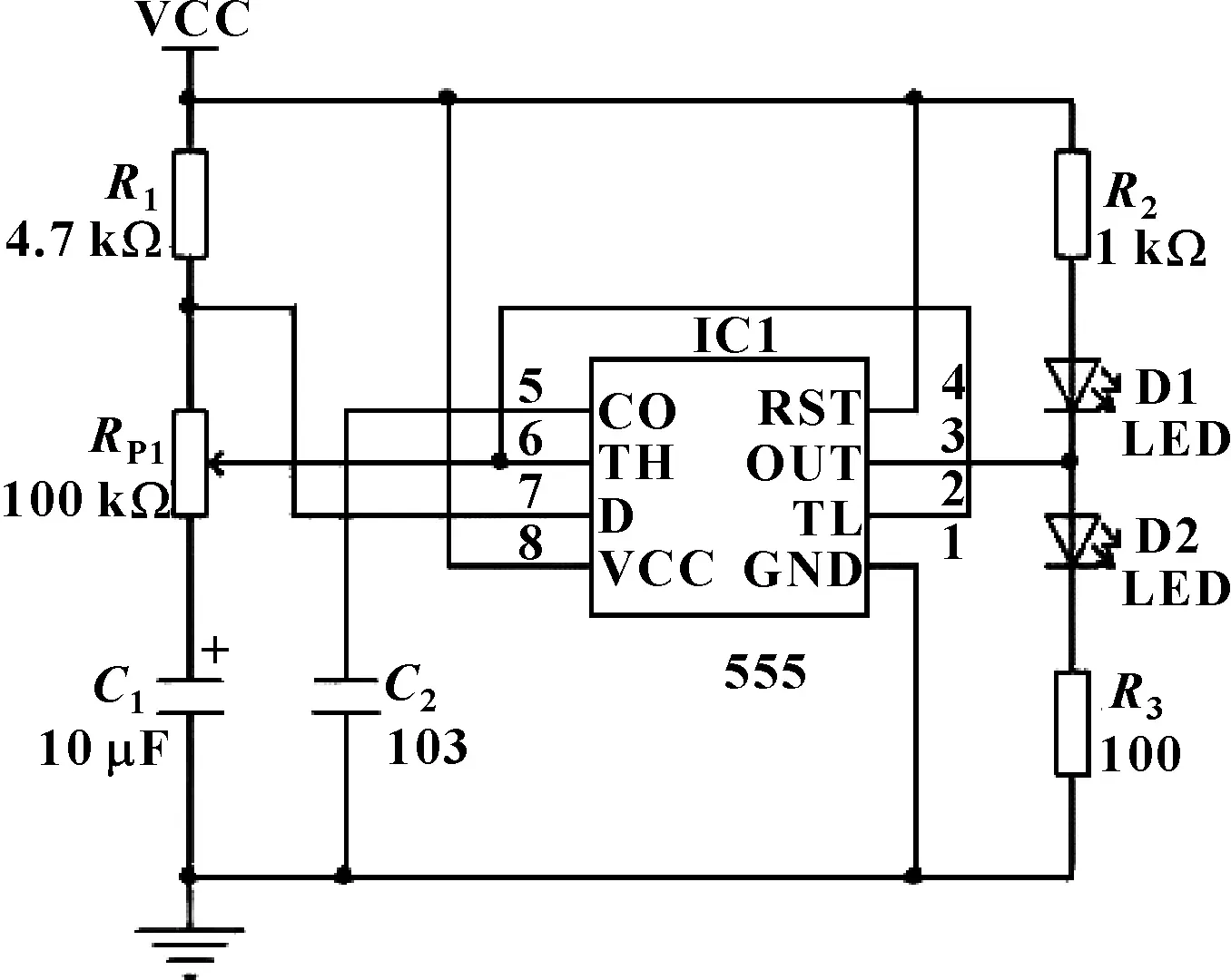
图3 闪光器驱动电路
接通电源后,如此时输出为高电平,则电容C1充电,充电回路由电源VCC经R1、RP1和C1到地。电容C1两端的电压按指数规律增长,当达到2/3电源电压,即TH和TL端电平大于2/3VCC时,输出翻转为低电平。若电源接通后为低电平输出,则电容C1放电,放电回路经C1、RP1、555芯片7引脚到地形成回路,C1端电压按指数规律下降,当下降到1/3电源电压,即TH和TL端电压小于1/3VCC时,输出电压翻转为高电平,电容C1再次充电。如此周而复始,产生振荡。系统主要参数为
输出高电平时间T1=(R1+RP1)×C×ln2
输出低电平时间T2=RP1×C×ln2
振荡周期T=(R1+2×RP1)×C×ln2
由以上分析可得,调节可变电阻RP1即可改变输出振荡信号的频率,驱动信号从引脚3输出一个高低电平,控制D1和D2两个前照灯的闪烁。当输出信号为高电平时,D2灯亮,D1灯不亮;当输出信号为低电平时,D2灯不亮,D1灯亮。可实现双灯闪烁的效果,且闪烁的速度可调。
2.4 信号采集模块
2.4.1 光强检测电路
此系统通过光照强度传感器检测车辆前方的光线情况,判断是否有会车发生,并驱动执行机构完成近远光切换操作。
光强检测电路主要包含光敏电阻和模数转换(A/D)两部分。光敏电阻可根据车辆所处环境光照强度的变化改变自身阻值,并通过检测电路转换为电压变化。车辆前方光照强度越强,电阻值变化越大,转换后的电压值也越大。该电压信号通过A/D转换为精确的数字信号,传递给单片机以作处理。光强检测电路如图4所示。
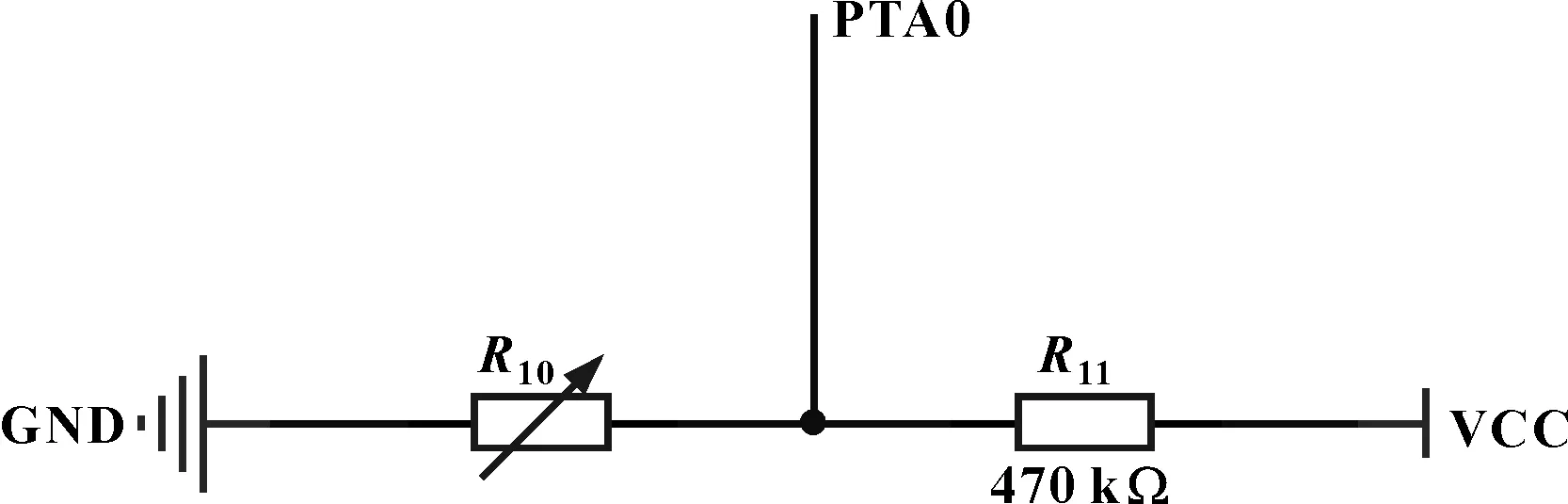
图4 光照检测电路
2.4.2 车速信号采集电路
车速表上安装的光电开关完成车速信号的采集。光电开关由作为光源的发光二极管和作为受光器的光敏二极管组成,信号盘装在两二极管中间,由发动机提供动力使其转动,信号盘转速与发动机转速成正比。发光二极管作为输入端,供电工作后发射光信号,此信号通过信号盘上的光孔被光敏二极管接收。
当信号盘转到光孔处,光线信号通过光孔,光敏二极管接收到光信号,电阻值变低,输出电压值升高。转到遮光处时,光线信号被遮挡,无法被光敏二极管接收,此时光敏二极管电阻值升高,输出电压值降低。综上所述,光电开关输出的是一个变频率的方波信号,其频率由车速决定。车速信号转换电路如图5所示。
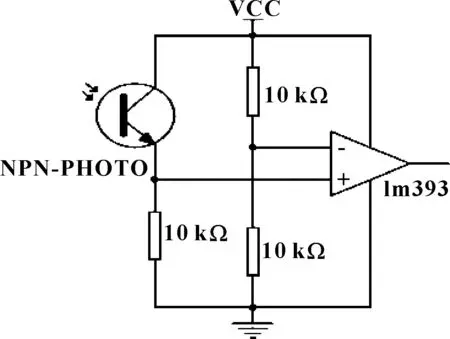
图5 车速信号转换电路
2.4.3 红外测距电路
红外测距电路主要由发射电路和接收电路两部分组成。工作时由发射电路的红外放光管发射红外光波,光波遇到被测物体反射回来,由接收电路中的光敏接收管吸收,根据所吸取光波强弱程度判断被测物体与传感器的实际距离。
(1)红外测距发射电路
红外测距发射电路如图6所示,由控制电路开闭的三极管和放大电路组成。单片机接收到红外测距传感器控制引脚Vin的信号后,驱动发射电路三极管导通,信号经放大后传送到与放大电路集电极连接的红外发光二极管,完成红外光波的发射。
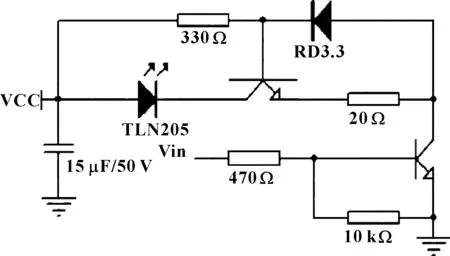
图6 红外测距发射电路
(2)红外测距接收电路
红外测距接收电路如图7所示,由光敏接收管和两级放大电路组成。光敏接收管TPS708吸收经被测物体反射回的红外光后,可根据光线强度产生对应大小的电流信号,该信号经两级放大器放大后转换为电压信号。此信号输入至单片机经A/D转化计算即可得出测量物体距传感器的实际距离。
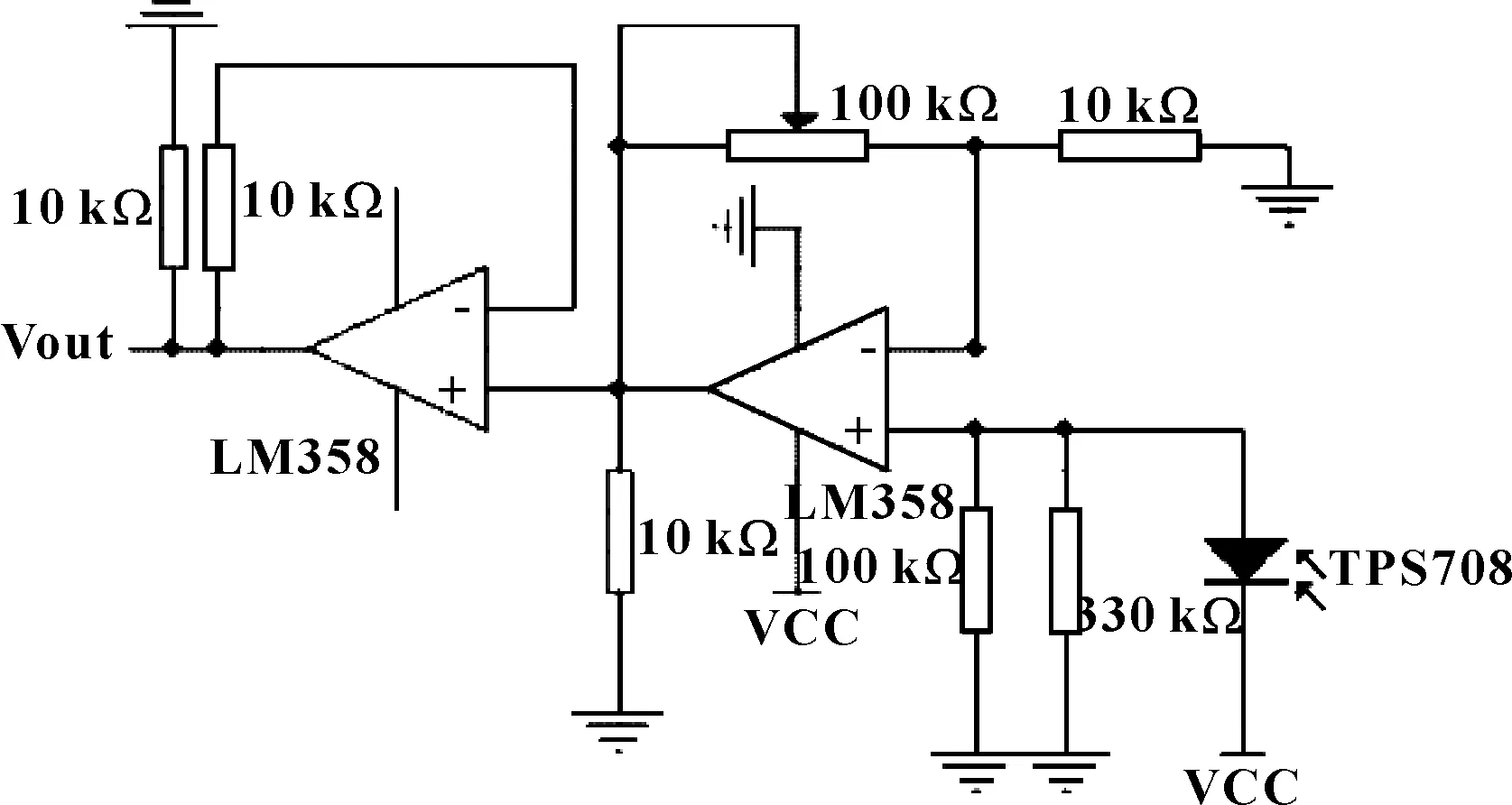
图7 红外测距接收电路
2.4.4 方向盘转角采集电路
智能照明系统以方向盘转角信号判断车辆转动时的偏转角和偏转方向,以此控制转向灯的开闭。方向盘转角传感器安装在方向盘转轴上,由中间的大齿轮和两侧的2个小齿轮组成。大齿轮跟随方向盘转动而转过相应角度,带动两侧的小齿轮运动。由于两小齿轮的齿数相差特定值,因此其转动的角度会发生差异,并产生不同相位的两个转角信号[5]。单片机可根据两个小齿轮输出的相位关系,计算得到方向转向及转角值。
方向盘转角采集处理电路如图8所示,传感器输出的模拟信号经过低通滤波处理,随后被接入电压跟随器,提高输入阻抗,最终信号传送至单片机进行计算处理。
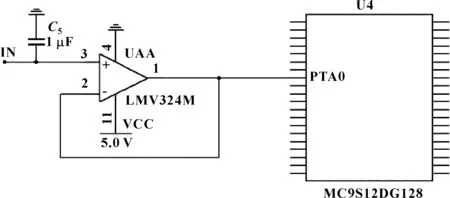
图8 方向盘转角采集处理电路
3 系统软件设计
3.1 灯光模式控制
微处理器根据车速及光照强度传感器信号判断车辆所处的路况环境,控制前照灯及辅助灯光的开闭模式。当车速传感器返回当前速度小于60 km/h时,单片机输出高电平,控制辅助车灯继电器通电,接通两侧辅助灯光电源,以拓展照明宽度满足当前行驶需要。当车速传感器返回当前速度大于60 km/h时,单片机输出低电平,与辅助车灯相接的继电器断电,切断两侧辅助灯光电源。根据光照强度传感器输出信号检测会车状态,无会车时,默认远光灯开启,增加照明强度,满足行驶需要。
3.2 近远光自动切换功能
微处理器根据红外测距传感器和光照强度传感器返回的信号,判断当前是否出现会车情况。在汽车行驶过程中,若红外测距传感器返回前方特定距离内出现被测物体信号且光照强度传感器同时返回前方具有特定光强信号时,即存在会车可能[6]。单片机控制与近光灯供电端相连的继电器接通,切换至近光灯状态。若两传感器输出信号发生变化,即表示会车过程结束,单片机控制与远光灯供电端相连的继电器接通,切换为远光灯状态。
4 系统工作情况
汽车智能照明系统如图9所示。
图9 实物模型
图10与图11分别表示系统执行远光及近光照明时的情况。可知:智能照明系统可稳定实现近远光的单独控制,并准确完成两者的自由切换。

图10 实物模型远光照明

图11 实物模型近光照明
图12—图14表示系统两侧辅助车灯单独及同时开启时的情况。可知:当汽车在转向过程中,智能照明系统可单独实现左、右任一侧辅助灯光开启,以使驾驶员获得更好的行车视线。此外,当前方视野复杂时,系统还可控制两侧辅助灯光同时开启,以增强照明效果。

图12 左侧辅助灯光开启 图13 右侧辅助灯光开启 图14 双侧辅助灯光开启
5 总结
基于MC9S12XS128单片机设计的汽车智能照明系统可根据光线强度、车速、距离及方向盘转角等传感器信号,判断当前车辆的行驶状态,选择合适的照明模式,实现近远光自动切换、辅助车灯开启及转向灯闪烁灯功能。实验结果表明,该智能照明系统具有良好的稳定性及可靠性。
