副井信号操车设备远程控制设计与应用
2020-05-28张卫李建
张 卫 李 建
(安徽开发矿业有限公司,安徽霍邱237400)
1 项目背景
2015年6月11日,国家安全监管总局下发的通知中提出建立较为完善的“机械化换人、自动化减人”标准体系,推动重点行业领域机械化、自动化程度大幅提升”。2017年8月,五矿矿业控股有限公司成立了智慧矿山研究院,以安徽开发矿业有限公司作为智慧矿山的依托单位,将自动化及信息化水平较好的安徽开发矿业有限公司作为试点矿山,积极研究智慧矿山的关键技术、制定智慧矿山建设的统一标准,打造安全、绿色、高效的智慧矿山。2018年5月1日起,《智慧矿山信息系统通用技术规范》(GB/T34679-2017)开始实施。意味着智慧矿山建设开始以国家标准的形式落地推广。2019年五矿矿业安徽开发矿业有限公司加快推进示范性智慧化矿山的建设,同时为了缓解企业人力资源紧张局面,改善井下从业人员工作环境,安徽开发矿业拟对在用2条副井提升机的信号操车设备进行远程集中控制和遥控改造升级。在确保副井提升机安全运行的前提下,取消井下各水平信号操车操作人员,井下信号操作设备改为远程集中控制或者专职信号工跟罐就地遥控控制,完成提升机井下各信号操作水平“无人值守”化运行。
2 项目概况
安徽开发矿业有限公司目前在用2条副井,分别为1#副井和联合副井,负担着全矿井下人员和物料的提升任务,1#副井总共有6个水平,联合副井总共有4个水平,现信号操车系统各水平配备1名专职信号操作工,负责本水平信号操车设备的操作和设备点巡检工作,未实现远控或遥控运行模式。
2条副井提升机的电气控制系统设备均采用的是ABB公司的传动系统(DCS800)、电控系统(PM861+PM856+CompactHMI6.0(Server-Client))和制动系统(Tube液压站+PM856+BCC闸控板);信号操车系统设备采用的是常熟市新虞电器有限责任公司的产品。
3 设计方案
3.1 设计目的、原则及要求
(1)本方案的设计目的是实现副井提升机信号操车系统的自动化。即在原相对独立的信号操车控制系统的基础上,增加井口信号台远程控制系统,实现对井下各水平信号操车设备的集中远程控制;增加各水平的遥控装置,实现跟罐信号工在罐笼里对到达水平的信号操车设备的遥控控制。
(2)设计原则。遵循“安全性、先进性、经济性、开放性”的基本原则。在已有的自动化及信息化系统的基础上进行改造提升,以达到智慧矿山的水平;采用当今先进的智能化装备和信息化技术,实施完成后整体相比较国内外先进矿山具有一定的先进性;改造优化过程中不破坏副井提升机的正常生产,改造后不会对设备的安全设施造成影响;改造后的系统具有良好的开放性,在需要的时候能够良好地兼容当前新技术、新设备及新系统,以实现矿山自动化的不断提升。
(3)设计要求。信号操车系统的优化设计需要按照《矿山安全规程》规定的要求进行设计和检验。多水平运行的副井提升机信号系统需要满足的要求有:①设置主点信号;②采用转发信号系统,由地表信号工汇总后统一发给提升机控制系统;③信号系统进行的相应操作要满足提升机闭锁的要求;④系统配置后备提升信号系统,在提升信号系统故障情况下可应急使用,可以发出“上提”、“下放”、“停车”、“紧停”4个声光信号;⑤急停信号报警功能,与提升机安全控制回路闭锁。
3.2 设计内容
3.2.1 控制系统结构
副井信号系统采用可编程控制器+远程I/O单元构成,通过分布式总线Profibus-DP连接,具有较灵活的调整性和扩展性。各水平的信号操车系统远程I/O单元将本水平的闭锁、急停、控制、保护、模拟信号、状态、故障等信息传输给信号系统的可编程控制器。信号系统的PLC将井口和井下信号系统处理好的闭锁、控制、保护等信号指令通过I/O传输给提升机控制系统,完成一次完整的副井提升机信号指令的控制传输过程。在原有的信息化控制系统的基础上新增信号远程控制操作系统,各水平新增信号遥控系统和就地控制系统来实现信号远程集中控制和遥控控制,新设计的信号操车控制系统结构示意图如图1。
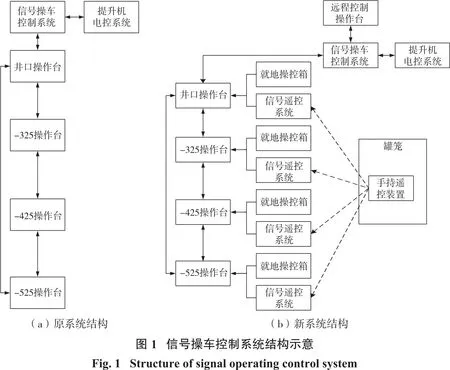
图1中,新增的井口远程控制操作台的作用是负 责井下各水平信号操车设备的远程控制;负责向提升机控制系统转发各水平的提升信号状态,其通讯方式是通过原信号操车通讯回路来实现的。井下各水平的操作台的作用是负责本水平信号操车设备的就地控制;负责向井口远程控制操作台发送本水平的提升信号状态。在各水平原有操作台的基础上新增信号操车就地控制箱和信号遥控系统,新增的就地控制箱是对原操作台个别功能的扩展,实现个别本地信号操车系统的功能。信号遥控系统是通过无线通讯的方式接收罐笼内的手持遥控装置的发送信号,再作用于原操作台控制回路来完成信号操车的相应动作。
3.2.2 远程控制系统
以联合副井为例,在原系统的控制方式和控制逻辑程序基础上,新增了远程集中控制操作系统;配备远程监视和操作信号工1名,所有的远程操作均满足原设备的运行闭锁条件。各水平中段的信号、限位、检测传感器的动作状态都在远程操作台上进行动态显示;当所有操作台按钮同时切换到“远程”时可实现远程操作模式,当任意按钮“远程/就地”不满足上述条件时,系统默认为现场操作台控制。远程控制系统的主要工况过程:
(1)副井提升机正常运行情况时(信号系统非检修模式),手持遥控设备非遥控模式,远程操作人员选择信号远程控制模式,选择远程控制的信号水平,在确保提升机停止运行的状态下,提升机罐笼在该水平的到位信号使能,可启动该水平液压站操作相应操车设备;当操车系统的闭锁1(安全门关闭到位)、闭锁2(摇台开启到位)、闭锁3(信号系统无硬件闭锁)满足提升机运行的条件时,远控操作台可以发出相应提升信号。
(2)副井提升机在信号系统检修模式时,远程操作人员选择信号远程控制模式,选择需要控制水平,在确保提升机停止运行的状态下,可启动该水平液压站操作相应操车设备。当操车系统闭锁3(信号系统无硬件闭锁)满足提升机运行的条件时,远控操作台可以选择提升模式、选择去向水平并发出去向方向等提升信号。
3.2.3 遥控控制系统
在原系统的控制方式的基础上,撤销原各水平的专职信号工,井口设置专职跟罐信号工1名,配备信号操作手持遥控装置;提升人员时,专职跟罐信号工负责跟随罐笼运行,完成各水平的操车设备的开闭操作和提升信号的发送;提物、下料时,停留在目的水平,担任该水平的专职信号工。遥控控制系统的主要工况过程:
(1)副井提升机正常运行情况时(信号系统非远控模式),跟罐人员手持信号操车控制器,选择信号遥控控制模式,提升机罐笼到达目标水平,在确保提升机停止运行的状态下,该水平的罐笼到位信号使能,跟罐人员可远程遥控打点停车信号、遥控启动该水平液压站操作相应操车设备;当操车系统的闭锁1(安全门关闭到位)、闭锁2(摇台开启到位)、闭锁3(信号系统无硬件闭锁)满足提升机运行的条件时,手持遥控设备可以选择提升模式、选择去向水平并发出去向方向等提升信号。
(2)当手持遥控装置出现故障时,跟罐信号工可根据实际情况操作就近控制箱控制该水平的信号操车设备,或通知远程操作人员来远程操作该水平的信号操车设备。
3.2.4 控制系统的硬件配置
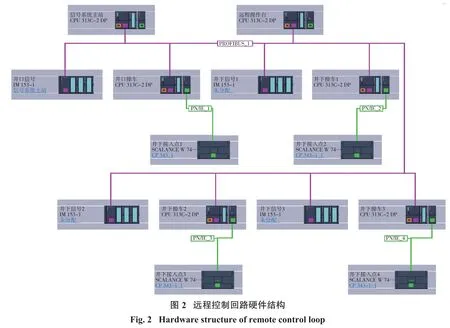
远程操作台需要实现与现场操作台完全一致的操控功能,所以选用西门子S7-300系列的I/O模块来配置一套新的远程控制系统。在所有信号操车操作台上新增加“远程/就地”选择按钮。远程安全回路主要设置信号系统紧急停车按钮和操车检修闭锁按钮。其控制方式为按钮硬线直接串入提升机控制系统的安全回路。远程上位机组态软件通过TCP/IP网络通讯协议与PLC实现数据交换。远程操作台与控制回路硬件结构示意图如图2
3.2.5 关键逻辑程序及注解
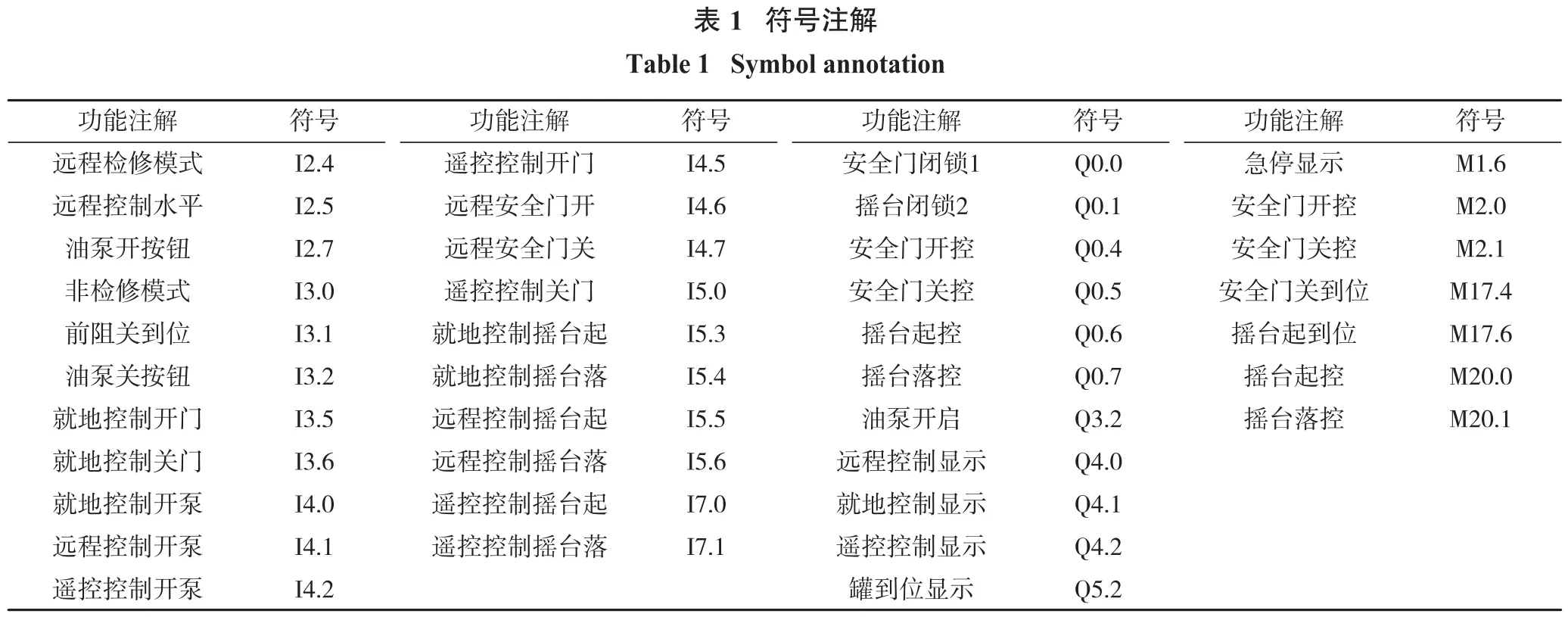
本设计是利用西门子公司的S7-300控制器编程软件对操车设备的远程、遥控和就地控制的关键逻辑控制程序进行设计和编译。在编程界面,新建硬件结构,添加通讯地址,设置模块通道变量,设计控制程序如下。符号注解如表1。
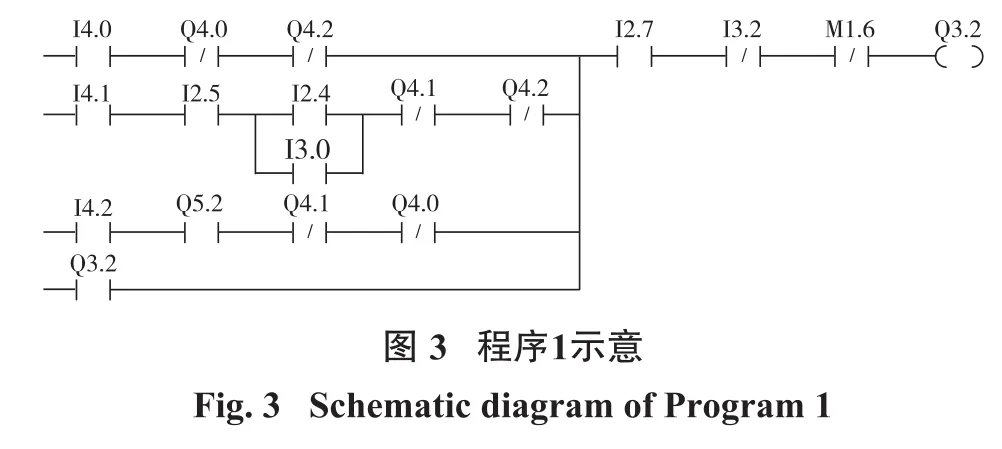
(1)程序1示意如图3,某水平操车液压站油泵控制程序逻辑,该程序主要实现的功能分别为就地模式/远程模式/遥控模式时,按下油泵启动按钮,油泵电机开启并保持输出状态的逻辑控制。
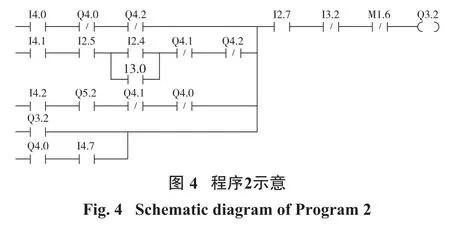
(2)程序2示意如图4,为某水平安全门开闭控制程序逻辑,该程序主要实现的功能分别为就地模式/远程模式/遥控模式下,按下安全门开启/关闭按钮时,安全门开启/关闭电磁阀输出状态的逻辑控制。
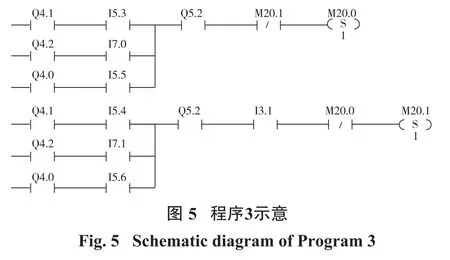
(3)程序3示意如图5,为某水平摇台起落控制程序逻辑,该程序主要实现的功能分别为就地模式/远程模式/遥控模式下,按下摇台抬起/落下按钮时,安全门抬起/落下电磁阀输出状态的逻辑控制。
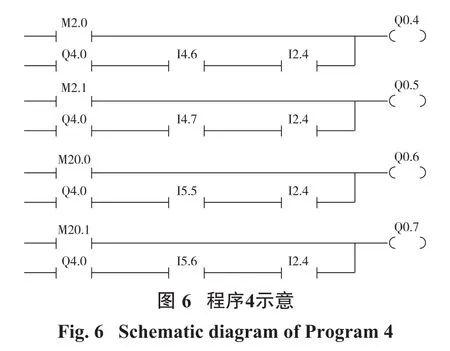
(4)程序4示意如图6,为某水平检修模式时,安全门和摇台的操作逻辑程序,该程序主要实现的功能在远程模式和检修模式同时满足条件时,通过操作安全门或摇台的启停按钮来实现目标水平安全门或摇台设备的启停功能。
?
其余程序内容不再赘述。
3.2.6 其他相关设备功能
(1)增加各水平乘罐人员要罐联络信号装置和视频监控装置,远程控制室和跟罐信号工能及时了解井下各水平的要罐需求,方便对罐笼的运行进行调度。
(2)增加各水平候罐区提升机运行状态显示功能,方便各水平候罐人员了解提升机的运行情况。
(3)增加联络呼叫功能,跟罐专职信号工能在井筒中与远程控制室的监控人员进行呼叫对讲,要求通讯设备通话质量清晰、待机时间长(20 h以上),通讯设备需一备一用。
4 风险分析及解决措施
副井提升机信号操作系统进过远程和遥控改造之后,无人值守岗位的安全风险都有所增加。其增加的风险点及解决措施如下:
(1)跟罐信号工的手持遥控装置通讯中断的风险,导致信号工不能遥控操作目标水平的信号操车设备。解决措施是在各水平的罐笼正常到位的合适位置安装该水平的就地控制箱,无线通讯故障时跟罐人员可通过就地控制箱来发送信号。
(2)井下无人值守时,操车设备出现闭锁信号的风险,导致提升机无法正常运行,且无人可以确认现场的设备闭锁情况。解决措施是各水平的操车重点部位增设监控设施和上位机的动态组态,地表可远程清晰查看故障水平闭锁位置的实际情况,远控旁路闭锁故障,运送维修工到达故障水平的二层平台,然后对闭锁问题进行处理恢复。
(3)无人值守时,候罐人员在井下误操作的风险。解决措施是加强乘罐须知培训,增加候罐区域的监控以及在各中段井口附近加装封闭的安全防护栏,避免乘罐人员进入原信号房对信号操车设备进行误操作。
(4)跟罐信号工跟地表远程监控人员通话不便的风险。解决措施是在罐笼里增加无线通讯设施,让跟罐信号工可随时跟地表远程监控人员进行对话通讯。
5 应用效果
5.1 设备功能的应用效果
(1)设计应用后,远程操作台新增了各水平信号操车设备的操作控制功能,通过控制权限的选择来远程实现了信号操车功能操作和监视管理,比原系统新增了一套远程功能。
(2)设计应用后,各水平新增加提升机运行状态显示,乘罐人员能提前知晓罐笼检修情况、罐笼去向水平、罐笼所在位置等候罐信息,方便了乘罐人员自由安排乘罐时间。
(3)设计应用后,原各水平信号改为由跟罐信号工通过无线遥控装置在罐笼里远程操作所在水平的信号和操车设备,改变了原有的固定操作方式,增加了操作范围。
(4)各水平操作台冗余了一套无线操作设备,减少了设备故障率。
5.2 人员优化的应用效果
以1条拥有4个水平的联合副井为例,在改造之前各水平设置1名信号工,1条井3班运行制计算,合计需要18名专职信号工。2条井合计需要36名信号工,副井信号操车系统经过远程控制改造以后每条井三班运行制时只设置9名信号工(井下4个水平1名,远程操作台1名)。2条副井提升系统减配18名信号操车的操作人员,大大优化了副井提升机的人力资源数量,提高了劳动效率和设备的自动化水平。
5.3 系统安全性的应用效果
(1)优化改造后的信号操车系统的I/O单元通讯仅用于闭锁、急停、控制、保护、信号的信息传输,现场总线的通讯用于模拟信号、状态、故障信息的传输,不参于闭锁、控制、保护、信号的传输。信号系统出现通讯中断的情况时,不会影响提升信号及副井提升机控制系统的正常运行。
(2)罐笼运行方式变为有专职跟罐信号工随罐运行时,提升机出现故障,乘罐人员被困井筒中间时,跟罐信号工能及时联系地表远控信号工,知悉提升机的恢复情况,并积极安抚和配合营救乘罐人员,避免了提升机被困井筒时造成的恐慌和未知的伤害。
6 结语
随着社会和产业的不断进步,绿色发展和本质安全的理念已经成为矿山企业的共识和硬性要求。借助智慧化矿山的系统建设趋势,降低生产管理成本,提高生产经营效果,改善职工劳动强度和作业环境,提升设备本质安全是“无人矿山、透明矿山、安全矿山、互联矿山”的必然选择。本项目设计的副井提升机信号操作远程和遥控控制系统是矿山企业自动化、信息化和智慧化建设的重要组成部分,它从根本上增强了设备的安全性能,优化了人力资源配置,提高了生产效率,达到了设计的预期效果。
