一种改进GMM-MRF模型的海上红外目标检测
2020-05-25仇国庆王艳涛杨海静魏雅婷
仇国庆,王艳涛,杨海静,魏雅婷,罗 盼
一种改进GMM-MRF模型的海上红外目标检测
仇国庆,王艳涛,杨海静,魏雅婷,罗 盼
(重庆邮电大学 自动化学院,重庆 400065)
目前海上目标检测已在民用和军事领域得到广泛的应用。由于海水波动大、目标成像面积少、特征不显著等特点增大了目标检测难度,为了消除上述的问题,首先提出了一种基于混合高斯-马尔科夫随机场目标检测模型,该模型利用所提出的混合高斯模型自适应调节学习率来抑制动态背景的干扰。然后,利用混合高斯模型对红外图像所计算的结果作为马尔科夫随机场的观测值,建立了马尔科夫随机场模型,可以解决混合高斯模型存在的不足。实验结果表明,本文的方法能够取得良好的检测效果。
红外图像;海上目标;混合高斯模型;马尔科夫随机场
0 引言
红外目标检测在许多领域中是不可缺少的关键技术,经常应用于海上监控,船舶检测和海上救援等等[1-2]。在复杂的海洋背景下,海水本身运动的复杂性,以及常常伴随着较大的动态背景干扰等。此外,在红外图像中,由于红外图像成像距离比较远,通常导致目标成像面积少、特征不显著等特点[3-4]。使得红外图像的海上目标检测变得非常地艰难。
目前,海上目标检测有以下几种:光流法、背景减法、核密度估计法等等。光流法因海上背景杂波会对光流场的计算结果产生影响等一系列因素,并且光流场计算相对而言较复杂,实时性比较差,需要特别配置的硬件支持;背景减法是一种常规的运动目标检测方法,适用于比较单一的场景中,故在本文中所提到的复杂场景中不能使用[5-8];核密度估计法是一种无参数的背景建模方法,由于红外图像成像距离比较远,通常导致这些目标成像面积少、目标特征不显著等特点。使核密度估计法无法准确地检测海上目标图像,另外根据核密度的原理可知其运算量较大,也很耗时。
对于海上杂波混合高斯模型能够很快速地随场景的变化而变化,也能够及时地检测出运动目标[9-10]。文献[9]提出了核函数-马尔科夫随机场前景分割模型,克服了核函数模型的缺陷,可以在平稳的海上红外图像中检测出运动目标,但海平面上的船舶与海水波动较大造成了红外图像不平稳,导致此类方法未能从海上运动图像中检测出目标;文献[10]提出了一种基于混合高斯模型算法,可以有效地解决海面杂波以及海水本身运动的复杂性,但在处理红外图像中目标信噪比低,目标具体特征不明显的问题未能有效地解决;文献[11]提出了一种改进结构协同稀疏检测算法,可以有效地解决红外图像中目标信噪比低,目标具体特征不明显,但在海水波动起伏以及海面杂波等因素影响时容易出现误检。
本文结合上述文献中出现的问题,提出了一种基于混合高斯-马尔科夫随机场目标检测模型,该模型利用所提出的混合高斯模型中的自适应调节学习率来抑制海上动态背景的干扰。然后,由于传统的混合高斯模型在处理序列红外图像时长时间的匹配,会使计算量增大,则采用一种动态调节混合高斯。最后,利用混合高斯模型对红外图像所计算的结果作为马尔科夫随机场的观测值,建立了马尔科夫随机场模型,可以解决混合高斯模型存在的不足。有效地检测出海上红外目标图像。
1 混合高斯模型
1.1 模型分布
对海上红外序列图像的每一个像素点的值建立与之相应的混合高斯模型,并通过一段时间的相互匹配检测。然后,根据每个高斯模型的持续性和变化性分布的差异,辨别出哪一个高斯分布更加接近于背景,则将该分布作为背景模型。背景建模时,若以序列{1,2, …,x}表示任意像素点(,)的一个时间序列上观测值序列,则时刻该像素点概率密度函数分布为:

式中:是像素X的维数;为高斯分布的个数;w,t是时刻第个高斯分布的权值;,t是时刻第个高斯分布的均值;,t是时刻第个高斯分布的协方差矩阵。
高斯模型在匹配过程中,传统的混合高斯分布设置固定的高斯模型,它是将图像中的每一个像素点的观察值与个分布中的前个高斯模型进行逐次比较。匹配原则如式(3)所示,如果它和个高斯分布都匹配,则需要对每一个混合高斯的权值,均值和方差进行更新。
式中:一般取值为2.5左右。
1.2 模型参数更新及匹配
混合高斯模型更新主要包括高斯模型学习率的更新和选取最合适的混合高斯模型匹配。在红外图像的像素点相互匹配过程中,则需要调节各高斯模型的权重、均值和方差,从而建立新的背景模型,以符合下一帧的前景提取,与像素点X相匹配的混合高斯参数按如下公式进行更新:



若该点像素X与个高斯分布相匹配,则M,t=1,否者M,t=0。在高斯模型的参数更新后需要对各个权重值进行归一化处理。其中为混合高斯模型的学习率,且0≤≤1。是参数学习率,且=(I|,t,,t2)。
2 改进的混合高斯模型算法
2.1 自适应调节学习率
由于混合高斯模型中的学习率影响了背景模型更新的速度,越小时,背景模型的更新速度就会变得越慢,然而对其噪声的抑制能力就越强,也会使海上船舶和水波一起被清除。越大时,背景模型变化的速度就会变的越快,同时也会带来较大的噪声,也会使海上船舶和水波一起被视为前景目标;为了能够完善传统混合高斯模型存在的不足。因此,本文为了地解决上述的问题。提出了用前景像素的个数来定义学习率如下式所示:

式中:f为当前时刻的前景像素个数;f-1为当前-1时刻的前景像素个数;为像素总数;为常数;一般取值为0.3。
2.2 动态调节和清除多余高斯分布
1)针对传统混合高斯算法为每一帧红外图像的像素值设定了固定的高斯分布个数,会导致资源浪费和降低传统混合高斯建模的速度,而且传统混合高斯算法的计算量比较大等相关因素。本文基于此问题提出了一种动态调节混合高斯模型分布个数的算法。如下式所示:

如果满足上式则说明新的像素值未能与任何高斯分布相匹配,故该像素值的高斯分布个数未能达到理想状态。则需要增加一个以当前像素值x为均值,init为标准差,init为权值的高斯分布;否者按照原来的方法更新优先级小的高斯分布。
2)由上式(8)可知混合高斯模型与背景模型在很长时间内处于相匹配状态,则高斯分量的权值会逐渐变大。然后,对权值进行归一化处理,会留下一些与背景模型不匹配的高斯分量,则权重将会逐渐变小。而在匹配算法当中只选择init/init值较大的个高斯分量来表达背景模型,对于那些权重逐渐变小的高斯分量可能没有被及时清除,会导致背景模型被误检。所以,如果存在某个高斯分量满足式(9),则该分量视为多余,并将其清除。

3 马尔科夫随机场模型
3.1 马尔科夫目标分割
由于海上红外图像成像距离比较远、目标成像面积少、目标特征不显著等特点,这通常会导致传统高斯方法在目标检测方面出现高误报率等问题[11-15]。因此,本文通过马尔科夫模型可以分割目标图像。在马尔科夫图像分割的问题可视为图像的标记问题[16-18]。平面上的像素点集为,满足:
={1,2, …,s×}
式中:×是图像像素点总数。

式中:()是标记场的先验概率;(/)是观察值的条件概率分布。()是观测场的概率。因为是上文计算得到的。因此有:

利用先验概率()和条件概率(/),就能够把目标图像分割出来。如下式:

3.2 算法主要步骤
Step1 输入海上红外序列图像。
Step2 根据上式(1)建立混合高斯背景模型。
Step3 ①若得到的海上红外图像的像素值满足上式(3)则利用上式(4), (5), (6), (7)对权值、均值和方差进行更新。②若得到的海上红外图像的像素值不满足则只更新式(6)。
Step4 利用上式(9)对得到的海上红外目标图像进行判断是否多余,多余则清除。
Step5 利用混合高斯模型对红外图像所计算的结果作为马尔科夫随机场的观测值,建立了马尔科夫随机场模型。
Step6 利用上式(10), (11), (12)对得到的观测值数据进行操作,完成一帧海上红外目标图像检测。
Step7 重复Step1~Step6完成序列海上红外目标图像检测。
4 实验结果及分析
4.1 实验环境及数据
仿真实验是在Intel(R) Core(TM) i5-3230M CPU @2.60GHz,8G内存上进行的,编译环境为Matlab 2016b。
实验中本文所用的图片大小为640×512,从图1~图6中海上红外目标图像检测中,能够清楚地看到本文的方法明显优于文中所提到的几种方法。为了验证本文算法对海上红外目标图像检测的有效性,采用了shipⅠ和shipⅡ进行对比。
4.2 实验结果分析
对于shipⅠ图中检测结果如图1~图3所示。图1采用的是传统混合高斯算法来对海上红外目标图像检测,从图1中可以明显地看出传统的混合高斯在对于海上红外目标图像检测中存在着很大的弊端,背景和前景未能完全分离,而目标检测中目标图像被清除。图2采用的是文献[9]中的算法对海上红外目标图像检测,算法背景虚化比较严重,目标检测仍有大量噪声存在。图3采用本文算法对海上红外目标图像进行检测,从图3中可以看出本文算法能够完全分离背景和目标图像。
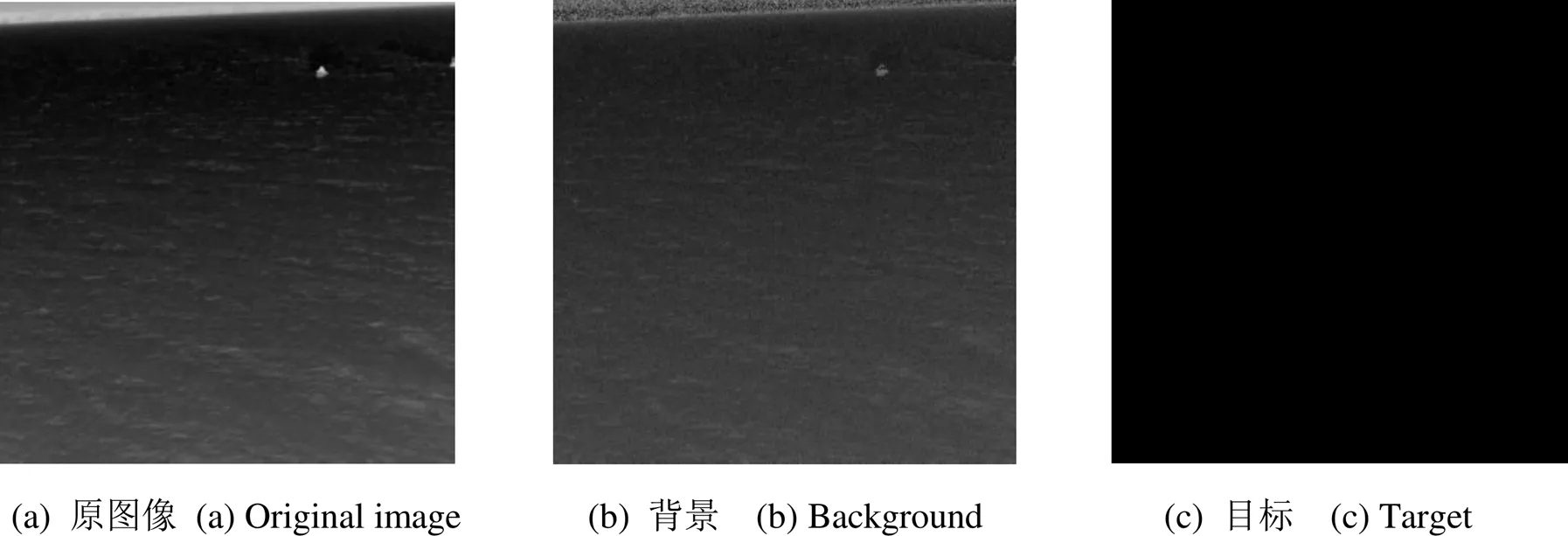
图1 传统GMM(Gaussian Mixed Model)算法对shipⅠ的检测
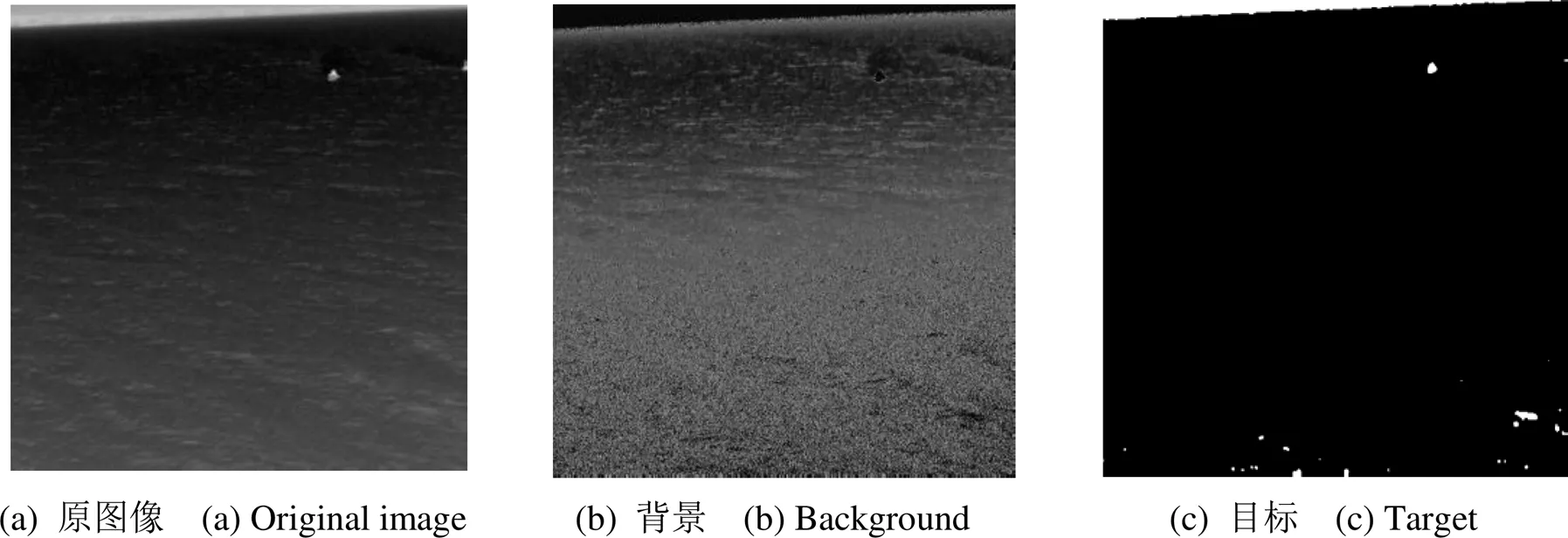
图2 文献[9]算法对shipⅠ的检测
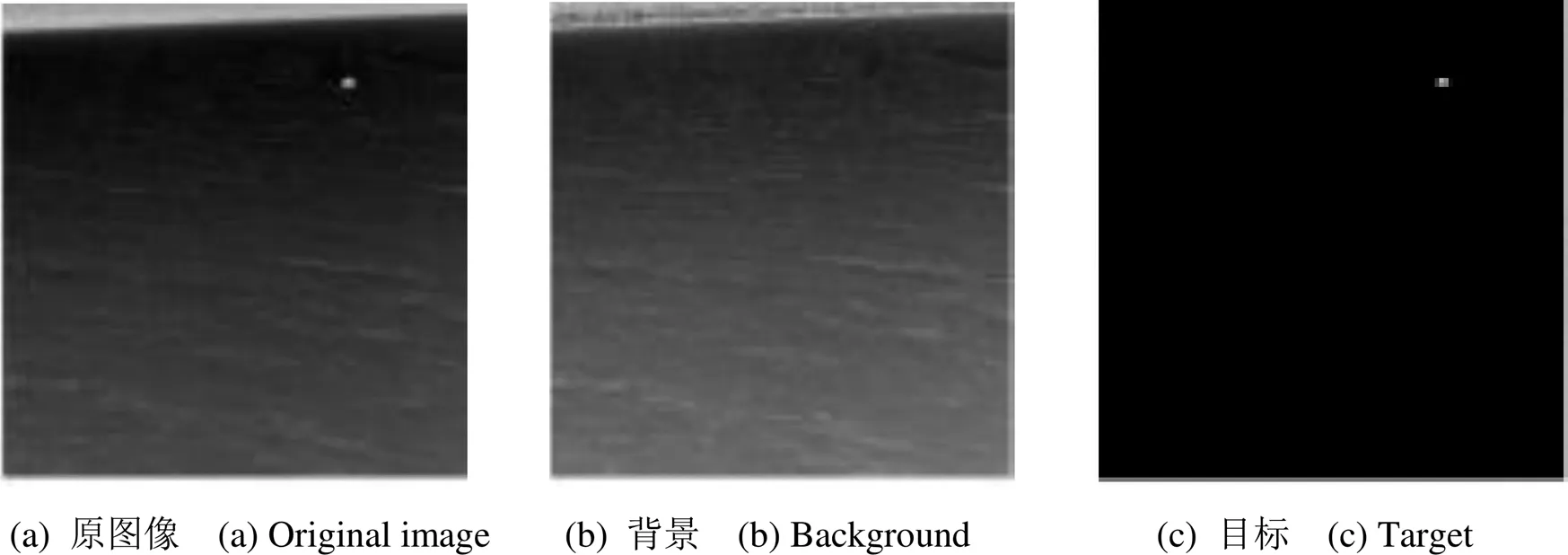
图3 本文算法对shipⅠ的检测
对于shipⅡ图中检测结果如图4~图6所示。图4采用的文献[19]中的算法检测,从图4中可以看出海上红外目标图像检测中背景图像模糊、不清晰,以及目标图像中噪声未能清除。图5采用的是文献[20]中的算法对海上红外目标图像进行检测,从图5中可以看出所检测到的背景图像明显优于文献[19]的算法,可以把背景和目标图像分离。但图5中目标图像仍然有部分噪声存在。图6是本文的算法,它克服了以上两种算法的弊端,能够把背景和目标图像分离。
从表1的实验结果可以看出,shipⅠ图中本文算法与以上两种算法相比运行时间缩短了31%、20%。shipⅡ图中本文算法与文献[19]算法、文献[20]算法相比运行时间分别缩短了25%、19%左右。因此,本文算法与以上4种算法相比节省了大量的运算时间,并且本文算法运行效率明显优于文中所提到的4种算法,而且检测效果优于这4种算法。
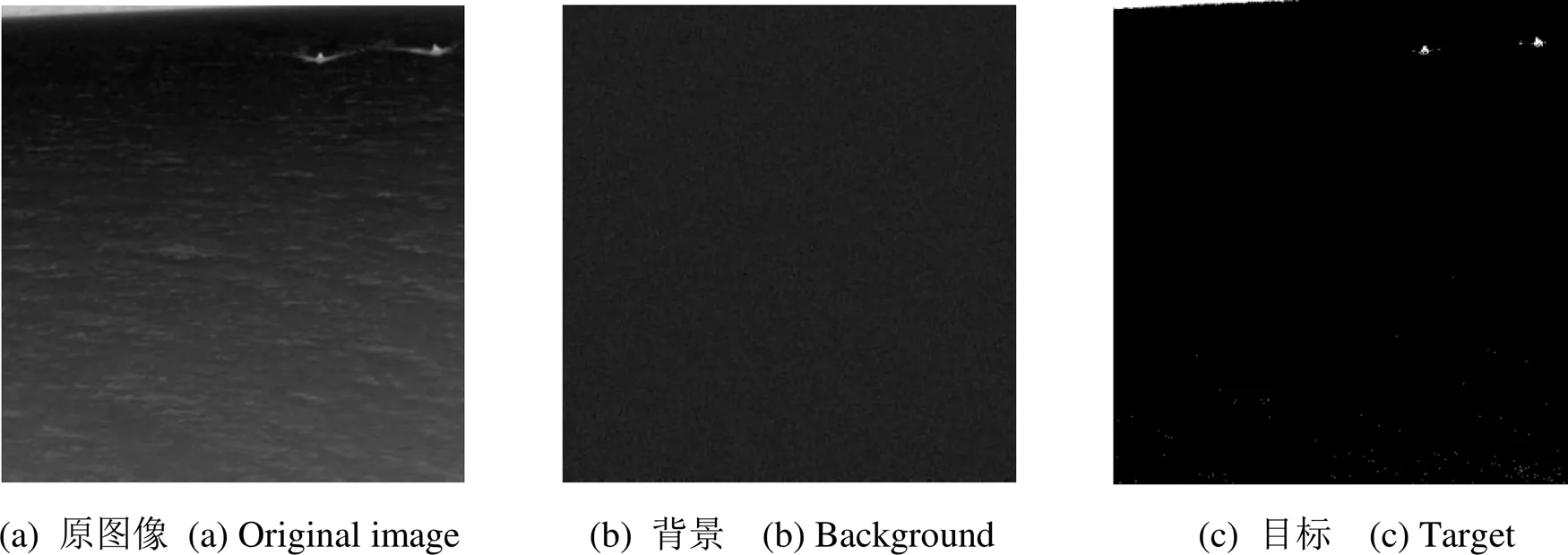
图4 文献[19]算法对shipⅡ的检测
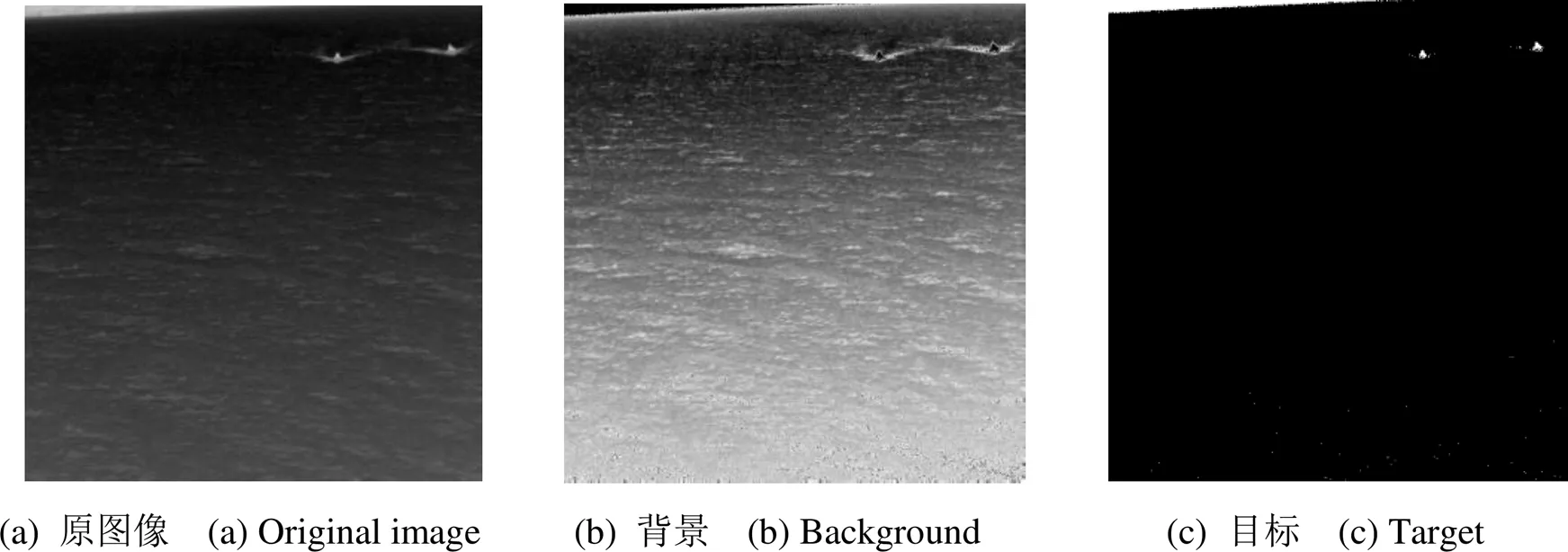
图5 文献[20]算法对shipⅡ的检测
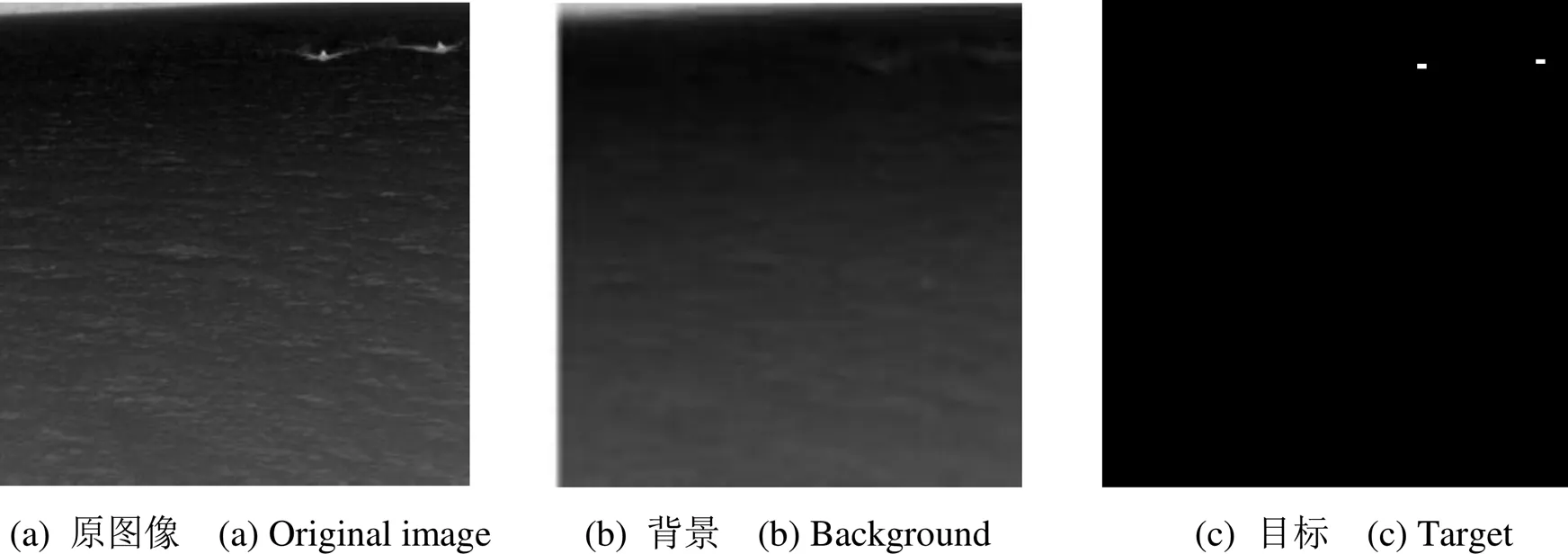
图6 本文算法对shipⅡ的检测
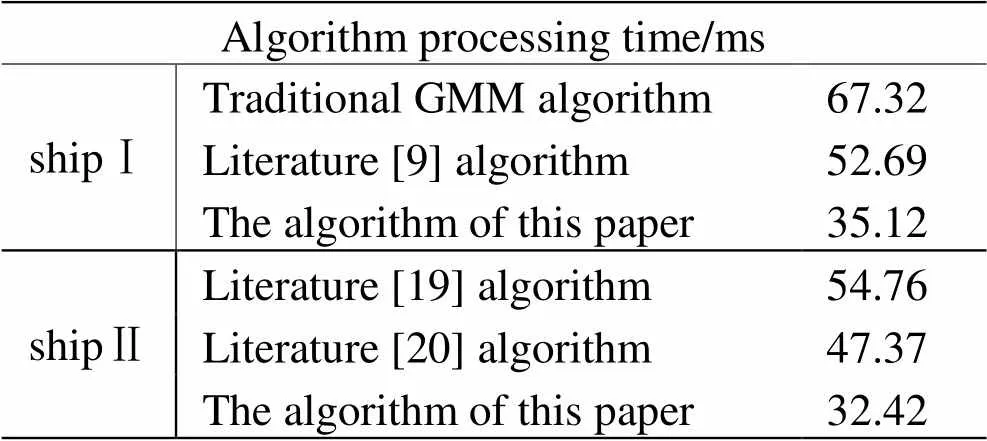
表1 各个算法运行时间
4.3 评价指标
为了对本文算法性能定性评价,引入以下参数:查准率(Precision)Pre=TP/(TP+FP)和误检率(FPR)FPR=FP/(TP+FN)。TP:表示检测正确的前景图像数目,FP:误检的前景图像数目,TP:表示检测正确的背景图像数目,FN:表示误检的背景图像数目。通过两组实验测试数据,绘制出相应的ROC曲线,可以很好地展示出一个整体的效果,具体的实验结果和数据显示如图7和图8所示。
分析实验测试shipⅠ,如图7所示,实验结果表明传统混合高斯算法和文献[9]中的算法对海上目标检测效果一般,比如在误检率FPR为0.012时,传统混合高斯算法和文献[9]中的算法的查准率(Precision)Pre分别为76.4%和81.2%,而本文算法的误检率FPR为0.012时,查准率(Precision)Pre为90.6%,分别提高了14.2%和9.4%。从图7中可以明显地看出本文的方法在检测出前景目标要比传统混合高斯算法和文献[9]中的算法好。
分析实验测试shipⅡ,如图8所示可知文献[19]和文献[20]的算法比传统的混合高斯算法以及文献[9]检测效果略胜一筹,但与本文算法相比还是略显不足。在误检率FPR为0.012时,文献[19]和文献[20]的算法查准率(Precision)Pre分别为84.1%和87.5%,而本文算法的误检率FPR为0.012时,查准率(Precision)Pre为94.6%,与上述两种算法相比分别提高了10.5%和7.1%。从图8中看出本文的算法比文献[19]和文献[20]的算法效果较好。
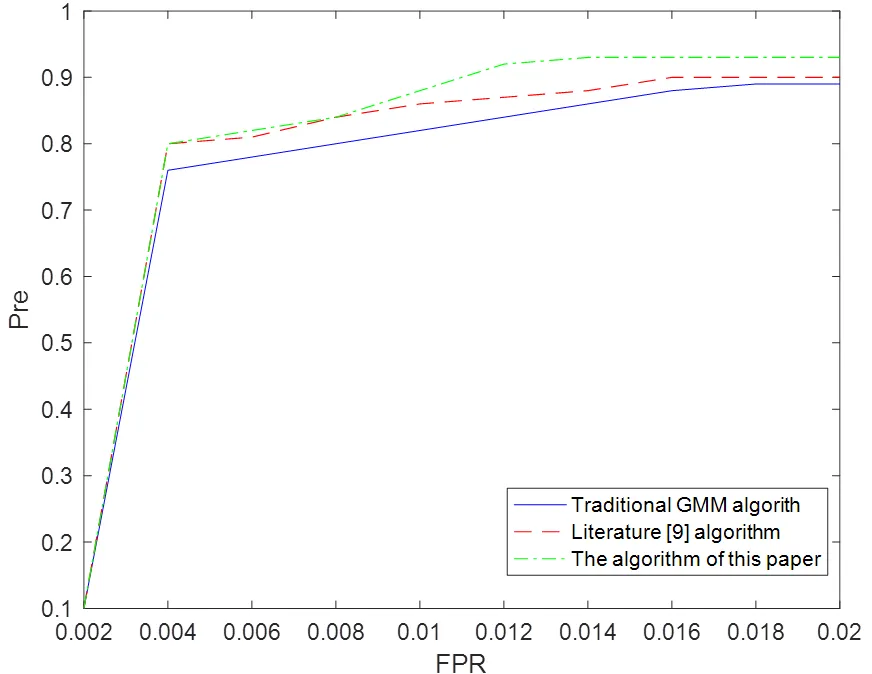
图7 ShipⅠ检测算法下ROC曲线
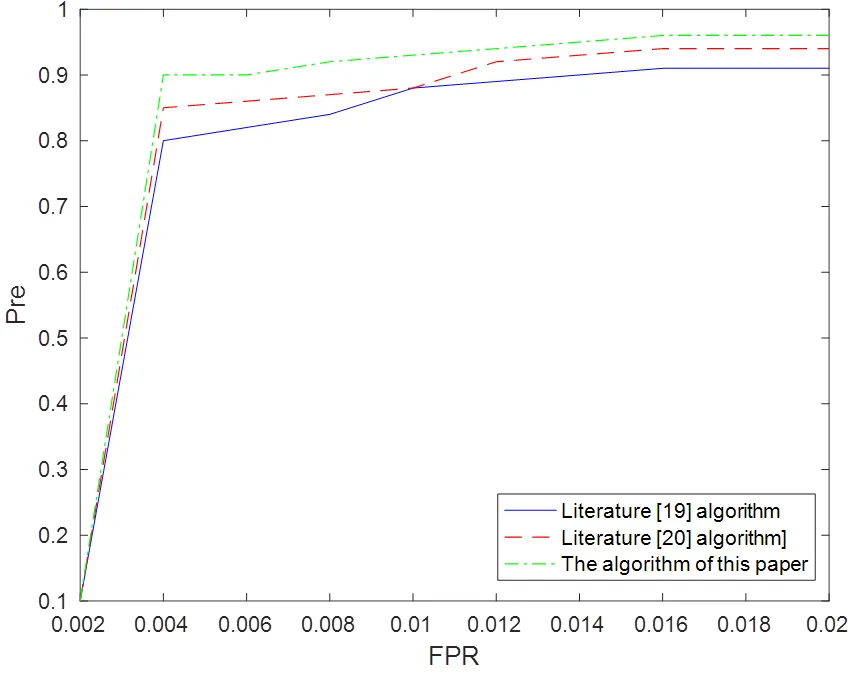
图8 ShipⅡ检测算法下ROC曲线
5 结论
针对海上红外目标图像检测,本文提出了一种改进混合高斯-马尔科夫随机场目标检测模型,本文算法在海上红外目标检测中处理速度快、运算时间短、运行效率高。在面对海水本身运动的复杂性和红外图像成像距离比较远、目标成像面积少等特征。本文算法能够快速地进行检测。该算法的优点是可以快速准确地检测出目标图像,提高了系统的实时性,具有一定的实用价值。
[1] 王文龙, 韩保君, 张红萍. 一种海空背景下红外小目标检测新算法[J]. 光子学报, 2009, 38(3): 725-728.
WANG Wenlong, HAN Baojun, ZHANG Hongping. A New Infrared Small Target Detection for Ifrared Image in background for Sea and Sky Background[J]., 2009, 38(3): 725-728.
[2] 刘博文, 戴永寿, 金久才, 等. 基于空间分布与统计特性的海面远景目标检测方法[J]. 海洋科学, 2018, 42(1): 88-92.
LIU Bowen, DAI Yongshou, JIN Jiucai, et al. Marine farsighted target-detection method based on spatial distribution and statistical characteristics[J]., 2018, 42(1): 88-92.
[3] DONG X, HUANG X, ZHENG Y, et al. A novel infrared small moving target detection method based on tracking interest points under complicated background[J]., 2014, 65: 36-42.
[4] HE Y, LI M, ZHANG J, et al. Small infrared target detection based on low-rank and sparse representation[J]., 2015, 68: 98-109.
[5] GUO J, Hsia C, LIU Y, et al. Fast Background Subtraction Based on a Multilayer Codebook Model for Moving Object Detection[C]//, 2013, 23(10): 1809-1821.
[6] XUE G, SUN J, SONG L. Background subtraction based on phase and distance transform under sudden illumination change[C]//, 2010: 3465-3468.
[7] Aslam N, Sharma V. Foreground detection of moving object using Gaussian mixture model[C]//(), 2017: 1071-1074.
[8] Pham V, Takahashi K, Naemura T. Foreground-background segmentation using iterated distribution matching[C]//, 2011: 2113-2120.
[9] 蒋永馨, 袁群哲, 邵承永, 等. 海上远景小目标检测方法的研究[J]. 光电工程, 2011, 38(10): 46-50, 56.
JIANG Yongxin, YUAN Qunzhe, SHAO Chengyong, et al. Detection Method of Long-range Small Object at Sea[J]., 2011, 38(10): 46-50, 56.
[10] J H Kim, J J Park, S H Ahn, et al. Small target detection using morphology and modified gaussian distance function[J].,2016, 9(6): 555-560 .
[11] S Hao, X Ma, Z Fu, et al. Landing Cooperative Target Robust Detection via Low Rank and Sparse Matrix Decomposition[C]//2016(IS3C), 2016: 172-175.
[12] GAO Chenqiang, WANG Lan, XIAO Yongxing, et al. Infrared small-dim target detection based on Markov random field guided noise modeling[J]., 2018, 76: 463-475.
[13] ZHANG H, SHI W, WANG Y, et al. Spatial-attraction-based Markov random field approach for classification of high spatial resolution multispectral imagery[J]., 2014, 11(2): 489-493.
[14] G Moser, S B Serpico, J A Benediktsson. Land-cover mapping by Markov modeling of spatial-contextual information in very-high-resolution remote sensing images[C]//, 2013, 101(3): 631-651.
[15] ZHAO Ji, FENG Chuang. Moving Object Detection and Segmentation Based on Adaptive Frame Difference and Level Set[J]., 2012, 41: 153-158.
[16] C Wang, N Komodakis, N Paragios. Markov random field modeling inference & learning in computer vision & image understanding: A survey[J]., 2013, 117(11): 1610-1627.
[17] L Sun, Z Wu, J Liu, et al. Supervised spectral-spatial hyperspectral image classification with weighted Markov random fields[J]., 2015, 53(3): 1490-1503.
[18] M Wei, H Chen, Q Wu, et al. Slow movement small targetdetecting method base on frame correlation[C]//, 2010, 2010, 26-28: 4742-4744.
[19] T Bouwmans, J Gonzalez, C Shan, et al. Special issue on background modeling for foreground detection in real-world dynamic scenes[J]., 2014, 25: 1101-1103.
[20] YANG Biao, ZOU Ling. Robust foreground detection using block-based RPCA[J]., 2015, 126: 4586-4590.
An Improved GMM-MRF Model for Maritime Infrared Target Detection
QIU Guoqing,WANG Yantao,YANG Haijing,WEI Yating,LUO Pan
(College of Automation, Chongqing University of Posts and Telecommunications, Chongqing 400065, China)
Currently, maritime target detection has been widely used in the civil and military fields. However, the difficulty of target detection is increased due to the large fluctuations of seawater, the small imaging area of the target, and the insignificant features.To eliminate these problems,a Gaussian mixed-Markov random field target detection model is proposed, which uses the Gaussian mixed model to adjust the learning rate and to suppress the interference of the dynamic background. Then, using the result of the Gaussian mixed model to calculate the infrared image as the observed value of the Markov random field, a Markov random field model is established. TheMarkov random field model can solve the existing defects of the Gaussian mixed model. The experimental results show that the method in this paper can achieve good detection results.
infrared image,maritime target,Gaussian mixed model,Markov random field
TN219
A
1001-8891(2020)01-0062-06
2019-03-25;
2020-01-05.
仇国庆(1963-),男,副教授,主要研究方向为智能仪器仪表及控制装置、运动控制系统,E-mail:wyt_superman@foxmail.com
国家重点研发计划(2018YFB1702200)。