基于红外图像特征与K-means的边缘检测
2020-05-25苏洪超洪少壮
苏洪超,胡 英,洪少壮
基于红外图像特征与K-means的边缘检测
苏洪超,胡 英,洪少壮
(大连海事大学 船舶电气工程学院,辽宁 大连 116026)
为解决红外图像边缘模糊导致边缘提取困难的问题,提出一种基于边缘特征与K-means结合的红外图像边缘检测方法。首先将人眼视觉特性与红外图像边缘点处的灰度分布特点结合,构造出反映其结构特征的数据集;再利用K-means将数据集分为边缘点和非边缘点,提取出图像边缘;最后利用二步法将边缘进行细化,以便实现红外图像边缘检测。实验结果表明:该方法能够通过自适应阈值提取出红外图像的完整外部轮廓,并保留内部边缘信息,对弱边缘起到良好的提取效果,并有效抑制噪声干扰。
红外图像;边缘检测;弱边缘;K均值聚类
0 引言
边缘检测通过寻找图像中灰度显著变化的区域,输出边缘图像,是计算机视觉和图像处理中解决各种问题的基本操作,广泛应用于目标跟踪[1]、图像分割[2]和图像融合[3]等领域。近年来,随着红外成像技术的迅猛发展,红外图像边缘检测成为图像处理中的热点问题之一。由于红外成像原理、外部环境失真和传感器本身热运动等原因,红外图像存在分辨率低、边缘模糊、细节损失、低图像对比度和背景噪声多等问题[4-5],使得其边缘检测的难度增加。因此,许多学者致力于研究能够适用于红外图像的边缘检测算法,如夏清[6]等人和许宏科[7]等人分别将Sobel算子和Canny算子进行改进,使其能够应用于红外图像的边缘提取。但上述算法只考虑了像素点单一的导数特征,对噪声的抑制能力不足,对于背景复杂的红外图像无法达到理想效果。此外,李会鸽[8]等人提出基于灰度简化B型关联度的灰度图像边缘检测,改进了传统算法中将单一导数特征用于边缘检测噪点过多的问题,为红外图像边缘提取提供思路。焦安波[9]等人提出基于改进的整体嵌套边缘检测(Holistically- Nested Edge Detection,HED)网络的图像边缘检测算法,利用深度学习技术为红外图像边缘提取提供了一种新方法。虽然经过改进的算法都提高了检测精度,但在不同场景不同应用背景下的适用性较低。由此,本文提出将边缘特征与K-means结合的边缘检测方法。根据边缘点附近灰度分布特点,建立边缘特征数据集,尽可能量化边缘点的全局信息。利用K-means对数据集进行聚类,将数据集分为边缘点与非边缘点,从而达到红外图像边缘提取的目的。实验表明,本文算法能够对红外图像中弱边缘进行提取,对粗大轮廓提取效果显著,并能最大程度上降低噪声的影响。
1 边缘点特征数据集构造
边缘检测的目的是将图像中灰度变化剧烈的地方检测出来,然后提取出与人眼视觉效果相符合的边缘信息,所以边缘提取应该与人眼视觉特征相结合。本文算法将人眼特性[10],如亮度视觉特性和结构视觉特性的概念应用到红外图像边缘检测中,将其与红外图像中两种固有信息即灰度信息和梯度信息相结合,构造出能描述红外图像边缘的3个基本特征:边缘灰度分布特征、边缘方向特征和边缘邻域一致特征。下面将详细说明如何对3大特征进行量化,并构造边缘特征数据集。
1.1 边缘灰度分布特征分量
由文献[10]中对人眼的视觉特性分析可知,亮度变化幅度大的区域容易引起人的视觉注意,被认为是边缘,而亮度均匀分布的区域则认为是背景或纹理。图像边缘提取应符合人眼的视觉特点,才能用于后续处理。红外成像系统是利用红外热辐射强度获取温度信息,利用灰度图像反映目标与背景的温度分布。其感兴趣区域的图像灰度必然会与周围背景有一定差别,可能是目标亮背景暗,或者相反。但无论是哪种情况,其亮度特点必在边缘处体现。所以整体较暗区域,不会存在目标边缘,只会是背景或纹理,而两者不是感兴趣区域,没有提取价值,不在本文算法提取范围内。因此,将红外图像灰度(,)作为边缘特征分量,排除其背景和纹理区域。
如图1所示,(a)为边缘灰度图像,(b)和(c)为背景和纹理图像。
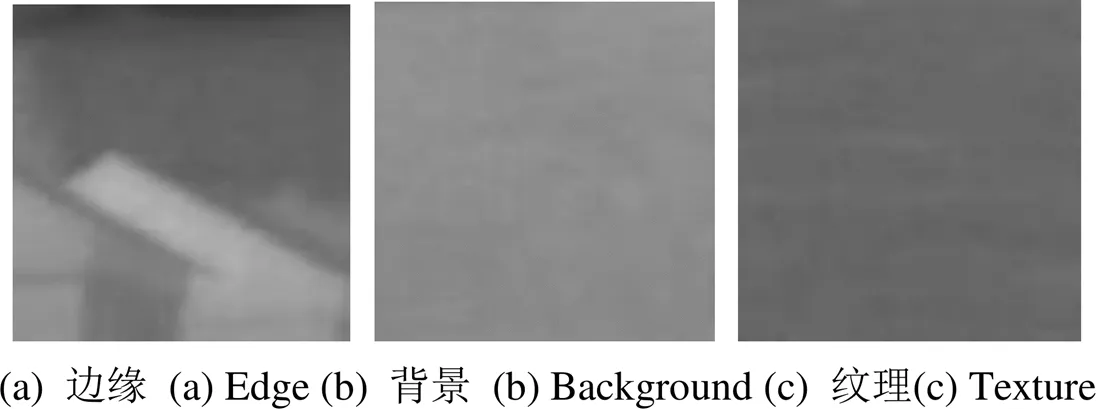
图1 边缘、背景和纹理灰度分布对比
1.2 边缘方向性特征分量
式中:为掩模边长;1和2为当前掩模白色区域1和黑色区域2的灰度和;计算方法如式(2)、(3)所示,其中(,)为图像(,)位置上像素值:
若点(,)为边缘点,则在边缘方向处(,)取得极大值。而平滑区域,无论何种方向,(,)都很小。由于本文算法没有采取传统梯度提取方法中将各方向梯度加权的提取方式,而是取各方向中最大值为梯度信息。因此,该方法能够尽可能保留红外图像弱边缘信息。
1.3 边缘结构特征分量
在红外图像中也有大量噪声带有明显方向性和较大的灰度突变,所以仅仅考虑灰度和边缘梯度特征是不充分的。基于人眼的结构视觉特性,将具有连续性的区域判断为边缘,而噪点分布散乱且随机。因此,本文引入结构一致性分量用来描述边缘与噪点在结构上的区别,尽可能的削弱噪声影响。以上一小节中梯度(,)为基础,生成一幅初步边缘图像,将初步提取的边缘图像进行二值化操作。通常二值化阈值选取中需要人为设定阈值,但人为选取具有主观性,且不同图像边缘分布具有随机性,所以人类视觉很难辨别出所有边缘位置,这将导致后续分类不准确。本文利用Otsu算法计算边缘信息中背景与边缘的类间方差,通过不断加大二值化阈值,当使类间方差达到极大值时停止迭代,此时认为边缘信息完整且能最大程度上降低噪声影响。但由于初步提取的边缘信息中含有大量噪点,边缘在整幅图像中占比较小,且传统Otsu算法对噪声和目标大小十分敏感,可能会得到局部非边缘区域的类间方差的极大值并输出错误的二值化阈值。为避免这种现象,本文算法利用文献[13]中的Otsu改进方法,将Otsu算法与图像熵结合,当达到式(4)、(5)附加终止条件时,递归停止:
式中:1,2视情况而定;0和1分别为整幅图像和大于阈值的灰度均值;0和1分别为整幅图像和大于阈值的像素熵。其中图像熵由式(6)方法求取:
式中:p为灰度值的频率。
该方法弥补了Otsu算法在多噪声小目标方面的缺陷,能够得到理想的分割结果。图3中从(a)到(d)为递归过程,可以看出本文引入改进Otsu算法后,能够得到完整的初步边缘图像,并满足后续边缘结构特征分量提取。
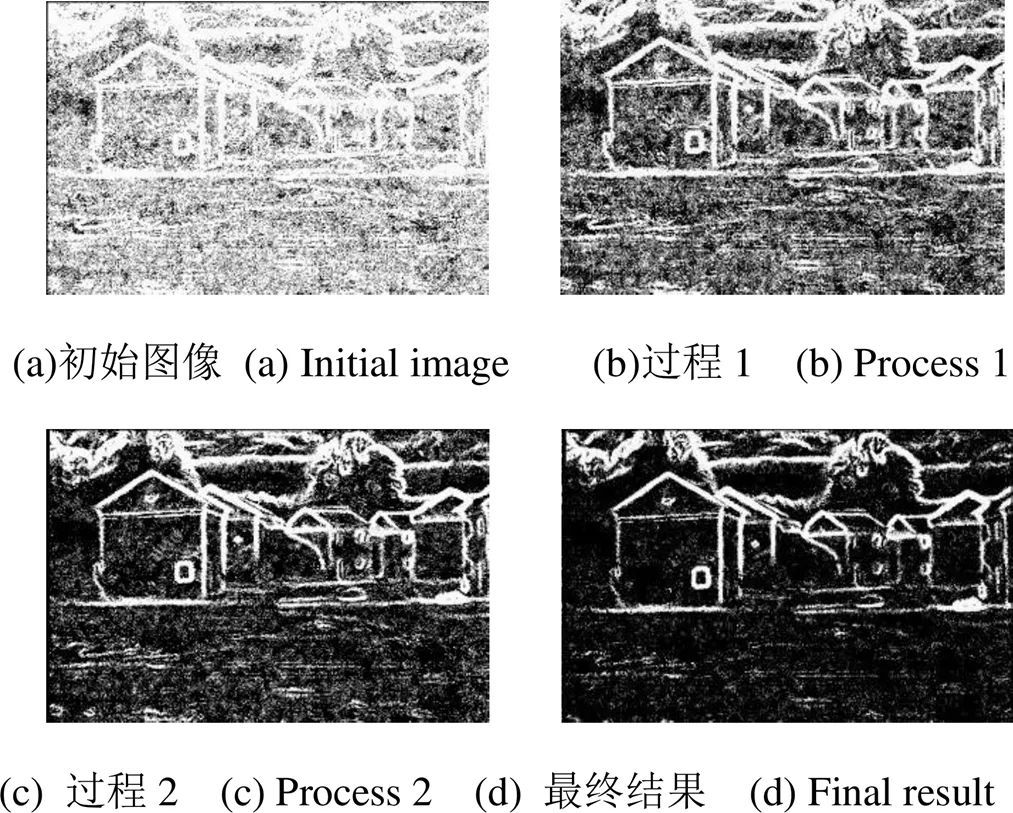
图3 初步边缘图像
在边缘初步提取图像的基础上,以边缘点(,)为中心,取大小为×的窗口,计算窗口内所有点与(,)相等的个数,生成边缘结构特征分量(,):

式中:(,)∈,={(,)||-|≤,|-|≤};(,)为边缘方向性特征分量。
当选取合适的反应级数n时,对lnk*与1/T进行线性拟合,由直线的斜率和截距即可得到样品动力学参数E和A,实现动力学求解。
由于得到的初步图像边缘具有一定的宽度和连续性,在边缘处的特征分量将出现比较高的值,而在噪声干扰处,其特征分量会很低。由此可以对噪声起到平滑作用,进一步抑制噪声对边缘检测的影响。
2 K-means聚类
K-means是一种聚类算法,即根据相似性原则,将具有高相似度的数据集划分为同一类。无需任何先验知识,是一种无监督过程,在人工智能、机器学习和模式识别领域中应用广泛。
K-means是目前最受欢迎的聚类方法之一,已被确定为数据挖掘十大算法之一[14]。该算法的描述及实现过程如下:
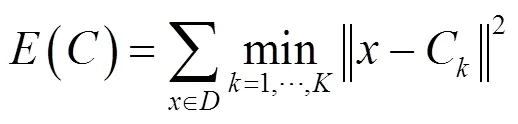
1)给定数据集={1, …, x},初始化个聚类中心={1, …, C}。
2)基于欧式距离将数据集中的点划分到某个分类之中。
3)计算新的聚类中心C:

4)当满足最小化误差函数()或达到迭代次数,迭代停止,否则转入2)继续迭代:
将上章定义的3个特征分量(,)、(,)和(,)分别归一化,并组成一个描述边缘特征的数据集(,):
(,)={(,),(,),(,)} (10)
利用K-means算法对其聚类,分为两类,即边缘点与非边缘点。由于边缘点数据集由3个特征向量组成,分别体现了红外图像边缘的3个基本特征。因此用K-means算法对其分类,实质是利用其逼近能力将3种特征有机整合在一起,以达到多尺度、多特征红外图像边缘检测的目的。
3 边缘细化
本文算法对图像边缘提取较“厚”。虽然检测到完整边缘信息,但不利于后续处理。所以应对边缘进行细化处理。现有边缘细化算法主要分为两类,分别为基于二值化边缘图像和基于形态学处理的方法。一个良好细化算法必须具有如下性质:
1)应给出单像素宽结构。
2)保持原本边缘连续性。
3)计算量小,不影响实时性。
本文采用林世毅[15]等人提出的基于二步法的边缘细化算法。其主要思想是利用模板将非边缘点逐步排除,在保持原有边缘的前提下,得到理想的单像素细化结果。如图4所示为边缘细化效果图,通过图中(a)、(b)可以看出,边缘细化算法效果显著,有利于后续处理。
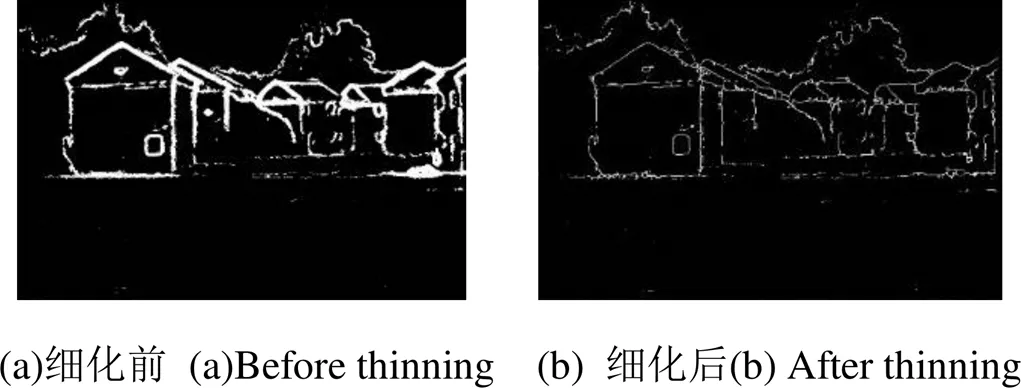
图4 边缘细化效果
4 实验结果分析
本文算法基于VS 2013环境和C++语言实现,并将文献[6]和文献[7]算法与本文算法进行对比测试。测试结果如图5、图6和图7所示。从图中可以看出,文献[6]算法对红外图像大轮廓提取效果显著,但内部轮廓提取不全。文献[7]算法边缘提取完整,但对噪声的抑制效果不够理想。本文算法对红外图像弱边缘检测能力优于另外两种检测方法,能够提取出完整边缘的基础上,有效抑制噪声影响。
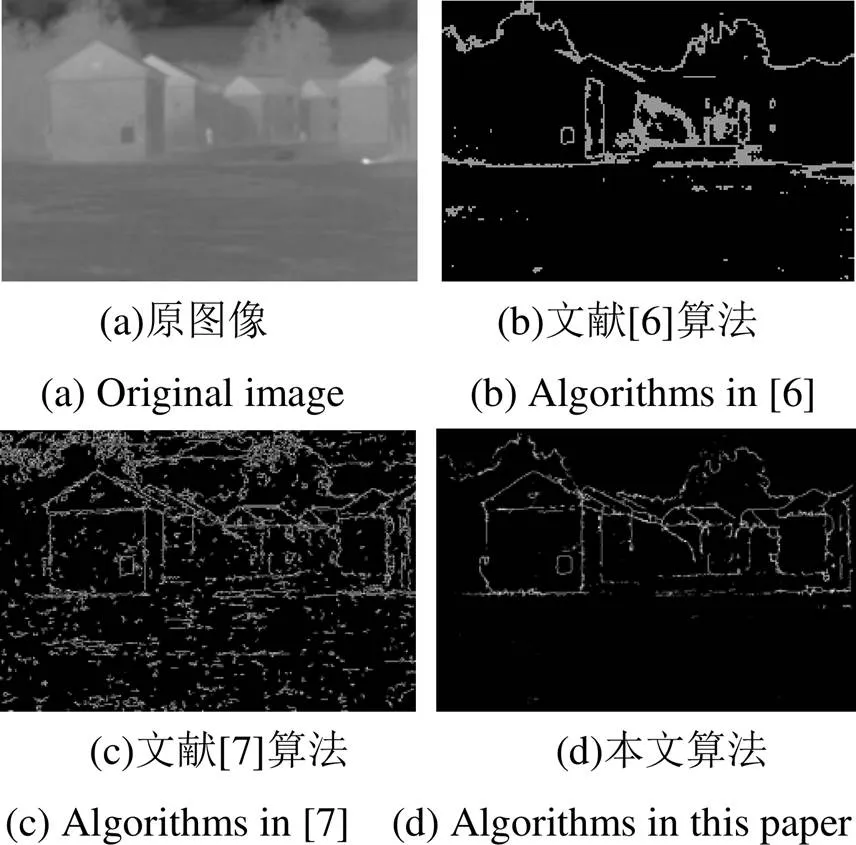
图5 实验结果1
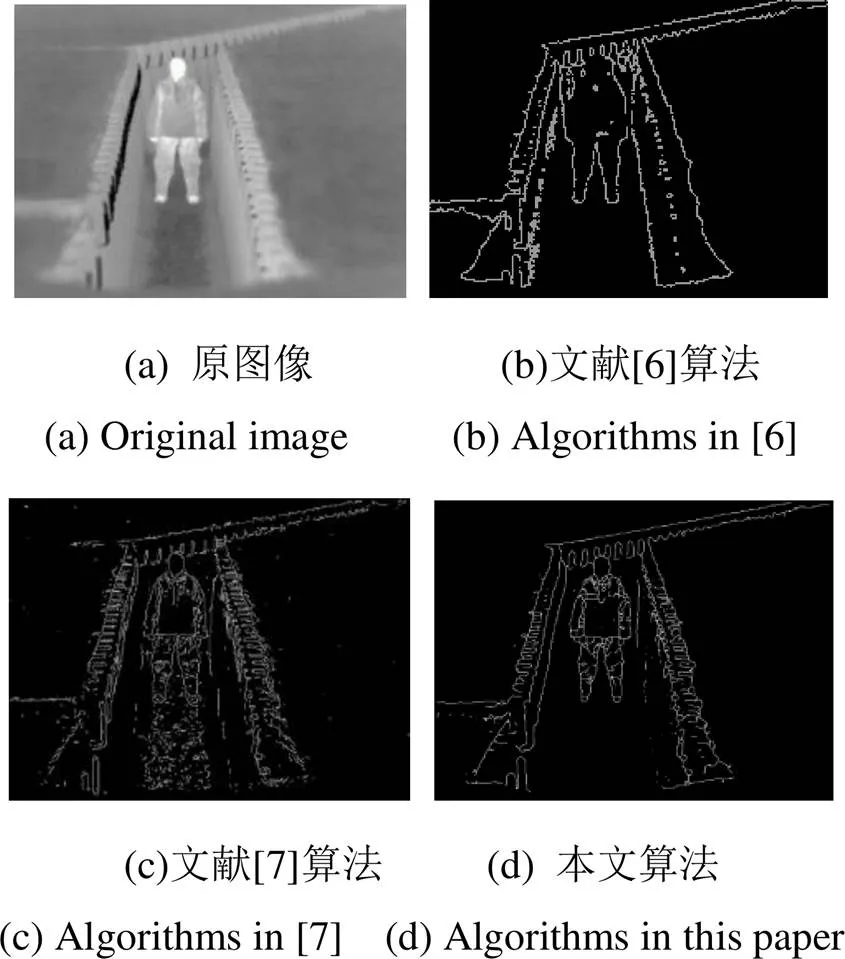
图6 实验结果2
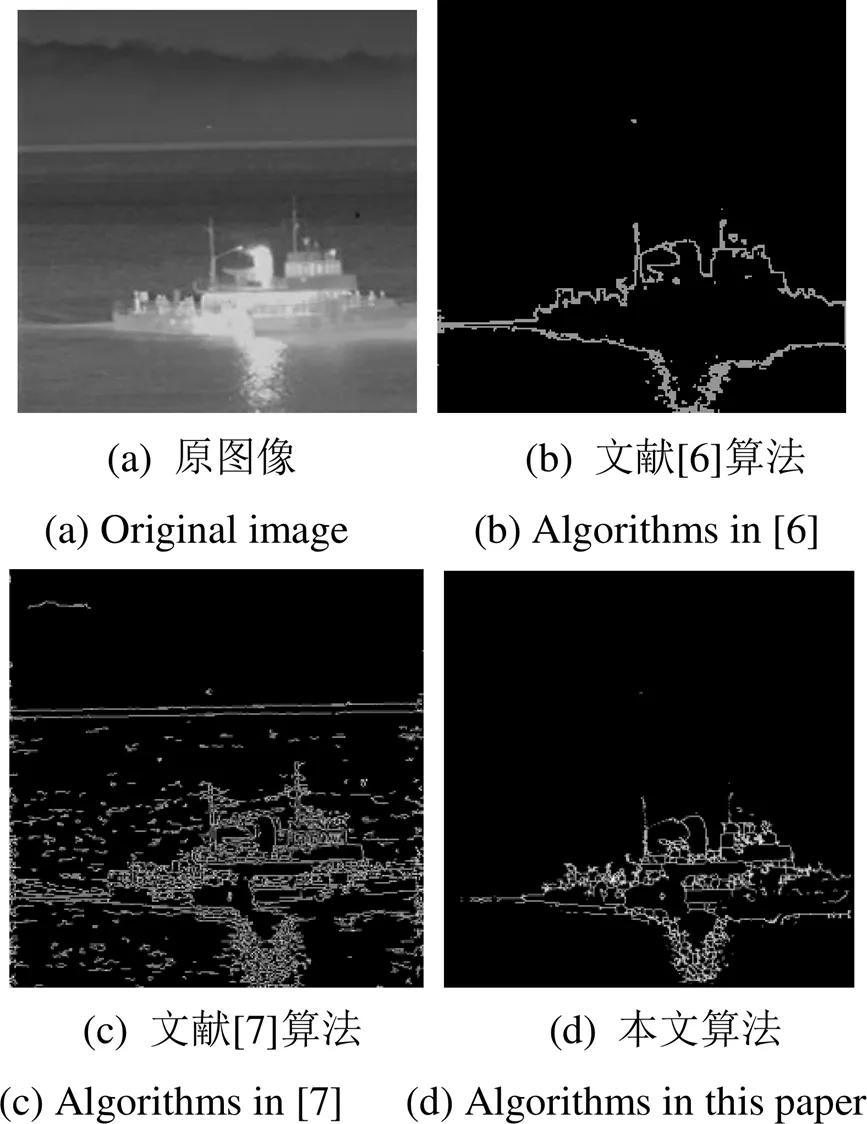
图7 实验结果3
5 结论
本文提出一种基于红外图像边缘特征和K-means结合的边缘检测算法,通过构造边缘特征数据集对红外图像的边缘灰度分布、梯度及结构性进行量化。由于该特征集在构造时充分考虑了红外图像边缘模糊不易提取和噪声点多的特点,因此对红外图像边缘有很好的提取效果,且能够抑制噪声的影响。此外,使用红外图像边缘的多特征而不是单一特征使得算法更具适应性。
[1] 修春波, 李欣. 融合分数阶微分边缘特征的自适应跟踪[J]. 光学精密工程, 2019, 27(1): 246-255.
XIU Chunbo, LI Xin. Adaptive tracking method with fractional differential edge feature[J]., 2019, 27(1): 246-255.
[2] 丁伟利, 谷朝, 王明魁, 等. 基于边缘预测与边缘增长的图像分割方法[J]. 高技术通讯, 2018(5): 409-416.
DING Weili, GU Zhao, WANG Mingkui, et al. Image Segmentation Based on Edge Prediction and edge growth[J]., 2018(5): 409-416.
[3] 邱泽敏. 结合区域与边缘特征的红外与可见光图像融合算法[J]. 红外技术, 2018, 40(5):53-58.
QIU Zemin. Infrared and Vision Image Fusion Algorithm Combined with Regional Characteristics and Edge Characteristics[J]., 2018, 40(5): 53-58.
[4] GAO C, MENG D, YANG Y, et al. Infrared Patch-Image Model for Small Target Detection in a Single Image[J]., 2013, 22(12): 4996-5009.
[5] MENG J. Edge enhancement and noise suppression for infrared image based on feature analysis[J]., 2018, 4(5): 142-152.
[6] 夏清, 胡振琪, 许立江, 等. 一种改进Sobel算子的热红外影像边缘检测方法[J]. 红外技术, 2015, 37(6): 462-466.
XIA Qing, HU Zhenqi, XU Lijiang, et al. A Modified Edge Extraction Algorithm of Infrared Thermal Image Based on Sobel Operator[J]., 2015, 37(6): 462-466.
[7] 许宏科, 秦严严, 陈会茹. 一种基于改进Canny的边缘检测算法[J].红外技术, 2014, 36(3): 210-214.
XU Hongke, QIN Yanyan, CHEN Huiru. An Improved for Edge Detection Based on Canny[J]., 2014, 36(3): 210-214.
[8] 李会鸽, 韩跃平, 郭静. 基于灰色简化B型关联度的图像边缘检测[J]. 红外技术, 2017, 39(2): 65-69.
LI Huige, HAN Yueping, GUO Jing. Image Edge Detection Based on Gray Relation of Simplified B-Mode[J]., 2017, 39(2): 65-69.
[9] 焦安波, 何淼, 罗海波. 一种改进的HED网络及其在边缘检测中的应用[J]. 红外技术, 2019, 41(1): 76-81.
JIAO Anbo, HE Miao, LUO Haibo. Research on Significant Edge Detection of Infrared Image Based on Deep Learning[J]., 2019, 41(1): 76-81.
[10] 贾其, 吕绪良, 吴超, 等. 基于人眼视觉特性的红外图像增强技术研究[J]. 红外技术, 2010, 32(12): 708-712.
JIA Qi, LV Xuliang, WU Chao, et al. Research on Infrared Image Enhancement Based on Human Visual System[J]., 2019, 41(1): 76-81.
[11] 杨昆, 张明新, 先晓兵, 等. 一种基于Sobel与K-means的边缘检测方法[J].光学技术, 2014(5): 394-398.
YANG Kun, ZHANG Mingxin, XIAN Xiaobing, et al. An Edge Detection Method Based on the Sobel and K-means[J]., 2014(5): 394-398.
[12] 陈锻生, 陈齐松, 刘政凯. 基于类灰度图的类Haar特征构建及其应用[J].郑州大学学报: 理学版, 2007, 39(1):33-39.
CHEN Duansheng, CHEN Qisong, LIU Zhengkai. Construction and Application of Haar-like Features Based on Gray-like Images[J].: Nat.Sci.Ed, 2007, 39(1): 33-39.
[13] 韩建涛, 姜卫东, 陈曾平. 基于OTSU准则及图像熵的局部递归分割算法研究[J]. 红外技术, 2004, 26(6): 89-92+96.
HAN Jiantao, JIANG Weidong, CHEN Zengping. Partial Recursive Segmentation Algorithm Based on Otsu and Image Entropy[J]., 2004, 26(6): 89-92+96.
[14] WONG J A H A. Algorithm AS 136: A K-Means Clustering Algorithm[J].(), 1979, 28(1): 100-108.
[15] 林世毅, 苏广川, 陈东, 等. 基于二步法的边缘细化算法研究[J]. 仪器仪表学报, 2004, 25(S1): 682-684.
LIN Shiyi , SU Guangchuan, CHEN Dong, et al. Study on Algorithm of Edge Thinning Based on Two-step Method[J]., 2004, 25(S1): 682-684.
Edge Detection Based on Characteristics of Infrared Image and K-means
SU Hongchao,HU Ying,HONG Shaozhuang
(School of Marine Electrical Engineering, Dalian Maritime University, Dalian 116026, China)
An infrared image edge detection method based on edge characteristics combined with K-means is proposed in this study to solve the problem of edge extraction caused by the blurring of infrared image edges. First, human visual characteristics are combined with gray distribution characteristics at the edge of the infrared image to construct a data set reflecting its structural characteristics. Second, K-means is used to classify the data set into edge and non-edge points to extract the image edges. Third, the edge is refined using a two-step method to achieve infrared image edge detection. The experimental results show that the proposed method can extract the complete external contour of the infrared image through the adaptive threshold and retain the internal edge information, which can extract the weak edge and effectively suppress noise interference.
infrared imagery, edge detection, weak edge, K-means
TP391
A
1001-8891(2020)01-0081-05
2019-07-08;
2019-12-24.
苏洪超(1996-),男,硕士研究生,研究方向为红外图像边缘提取、模式识别。E-mail:hongchaosuvip@163.com。
