一种新型宏动式3D鼠标设计
2020-05-19谢文娣彭瑞瑞许成奇
谢文娣 彭瑞瑞 许成奇


摘 要:新型宏动式3D鼠标具有空间三维位移变量和三维角度变量的同步检测功能,采用空间并联机构做机械本体,通过实时采集各导轨相关位移信号,由并联机构运动学解算出其真实的空间六维输入,能够大大简化人们使用普通鼠标加键盘的复杂操作,且成本低、实时性和可靠性好。
关键词:新型宏动式;3D鼠标;六维输入;空间并联机构
中图分类号:TP334.2文献标识码:A文章编号:1003-5168(2020)08-0076-03
Design of a New Type of Macro-motion 3D Mouse
XIE Wendi PENG Ruirui XU Chengqi
(Anhui Xinhua University,Hefei Anhui 230088)
Abstract: The new macro-motion 3D mouse has the synchronous detection function of three-dimensional spatial displacement variables and three-dimensional angular variables, uses a spatial parallel mechanism as the mechanical body, and calculates the real-time six-dimensional input of the space by collecting the relevant displacement signals of each guide in real time and using the kinematics of the parallel mechanism, which can greatly simplify the operated complex for people using ordinary mouse adding to keyboard, and has low cost, good real-time and reliability.
Keywords: new macro-motion;3D mouse;six-dimensional input;space parallel mechanism
随着三维技术的迅猛发展,三维操作系統应运而生,因此需要开发出具备空间操作能力的多维鼠标与之相匹配。市场上已有的六维输入设备大多采用基于力/力矩感知的技术,其主要问题在于操作复杂、控制精度低、缺乏操作真实感等[1-2]。为克服以上问题,本文设计一款具有空间六维操作能力的宏动式3D鼠标,可使操作者在宏动范围内有较真实的移动/转动感觉。其通过实时采集各导轨相关位移信号,运用并联机构运动学解算出其真实的空间六维输入。
新型宏动式3D鼠标的需求领域非常广阔,可以应用到娱乐、仿真、医学、工业虚拟装配、机器人等诸多领域。例如,飞行器仿真,结合虚拟现实VR技术,用户通过空间鼠标来自由控制系统中飞行模拟器的运动,实现飞行器在虚拟地形环境中的三维移动和三维转动,飞机可以在空间中实现前进、左右转弯、爬升、俯冲等真实飞机可实现的各种动作,使用户仿佛亲自操纵飞机在飞行,从而实现对真实世界中飞行器运动的仿真,给人一种比较真实的感觉,如图1所示。
1 硬件设计
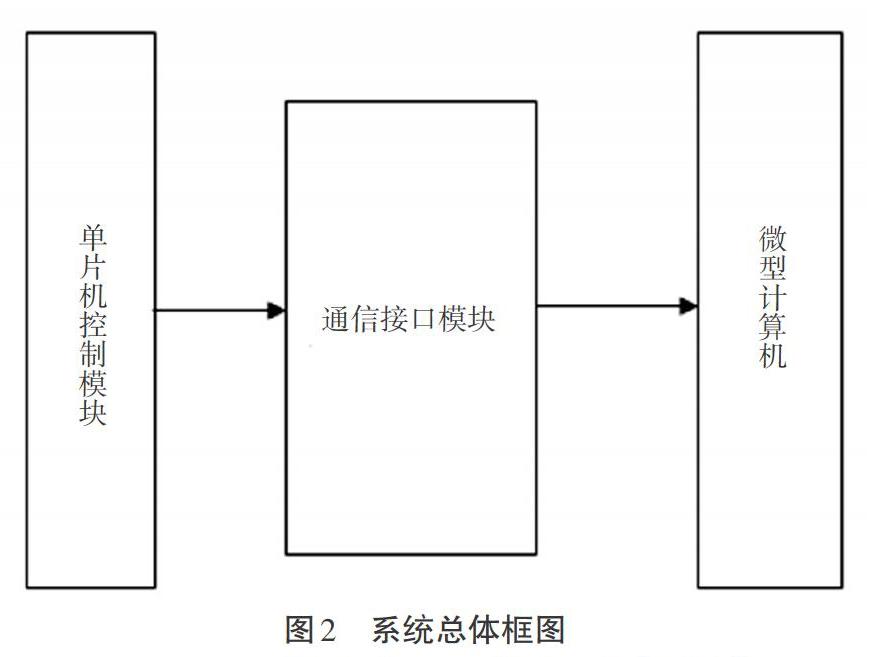
该3D鼠标主要由3个部分构成,分别单片机控制系统、通信接口模块和计算机模块。本设计选用STC89C52单片机作为鼠标控制器,选用TLC2543芯片完成A/D转换功能,选择CH375芯片作为单片机与PC机的接口芯片来实现单片机与计算机间的USB通信功能,USB驱动采用通用的CH372/CH375驱动程序。系统总体框图如图2所示。
STC89C52是一种低功耗、高性能8位微控制器,具有8K系统内可编程Flash存储器。单片机内拥有灵巧的8位CPU和系统可编程Flash,可直接使用串口下载,大大简化程序调试时间。传感器使用电位器,先将阻值的变化转化为电压变化,再经A/D转换芯片传给单片机。由于电位器的角度值或位移量与电压值一一对应,因而人们无须判断电位器的旋转方向。同时,A/D转换芯片是多路采集,分辨率高,故电路设计简单,成本低,鼠标分辨率高。USB全称为Universal Serial Bus(通用串行总线),使得计算机和外部设备的连接十分方便。本设计采用USB总线通用接口芯片CH375,在本地端,CH375具有8位数据总线和读、写、片选控制线,拥有中断输出功能,可以方便地挂接到单片机、DSP、MCU和MPU等控制器的系统总线上。CH375硬件接口电路如图3所示。
结构上,本设计选择基于3-UPS(3表示有三条相同的支链来连接动平台和底座,U代表虎克铰链,P代表移动副,S表示球关节)的具有六维运动的并联机构,以满足不同应用场合、不同自由度、不同灵巧度的需求[3-4]。3-UPS并联机构由动、静平台以及三个相同的UPS支链构成,其中虎克铰U由两个转动副构成,两个转动副的轴线分别垂直于和平行于静平台平面,且两轴线交于一点。六维位置姿态传感器并联机构由动平台、底座以及连接于动平台和底座之间的多条支链构成,动平台可以相对于底座移动或转动。通过改变支链的数目和支链自身的结构形式,动平台可以具有不同维数的运动特征,因此需要研究给定运动维数(如二维至六维)的并联机构的构造方法。空间多维鼠标要求具有空间六自由度的运动特征,因此本设计选用3-UPS并联机构,其运动平台作为操作球头,从而保证空间多维鼠标具有紧凑、小型的外观,便于操作的优势。
2 软件设计
上位机程序采用基于MFC的界面显示及控制程序,将单片机采集的九路传感器信号传到上位机程序显示,控制空间物体的运动,流程如图4所示。首先对USB通信芯片CH375进行初始化,上位机若不发出信号,则结束流程。否则单片机将会关闭中断,调用函数来采集传感器的信号,并向USB断点发送缓冲区写,再经过CH375向PC发数,之后PC机获取到单片机数据,送到界面显示。
USB通信程序流程是首先对OpenGL进行相关设置及初始化,然后导入三维模型,再对USB通信进行初始化,并设置循环时钟。随后,若CH375设备启动成功,将会接收USB通信数据,根据数据改变相应的变量,最后进行画面的更新。若设备启动失败,则结束程序相关操作,如图5所示。
3 结论
3D鼠标可以用来模拟控制工业上常用的并联机械手,二者在原理上是相似的,都具有六个自由度。所以,3D鼠标适用于手动控制并联机器人,在3D鼠标的控制下,机械手可以实现前后左右上下六个方向的平移,而且可以在空间里转动。
参考文献:
[1]于红英,刘鹏,赵娣.基于支链的并联机构位置分析及工作空间分析[J].吉林大学学报(工学版),2019(11):1-9.
[2]肖霄.一种基于3-UPS并联机构的六维控制器运动学分析[J].山东理工大学学报(自然科学版),2012(12):81-84.
[3]王志军,刘琬钰,崔冰艳,等.新型并联式六维力传感器及静态性能分析[J].机械设计与研究,2015(4):44-48.
[4]张珂,朱志涵,石钢,等.基于ANSYS的六轴力传感器的模态分析[J].上海应用技术学院学报(自然科学版),2015(15):66.
