大采高智能化工作面液压支架自动跟机研究与应用
2020-05-19李小磊秦志强
李小磊 秦志强
(焦作煤业(集团)有限责任公司,河南 焦作454100)
为深化煤炭行业供给侧结构性改革,推动煤炭产业转型升级,提升煤矿安全生产水平,河南省下发《河南省煤矿智能化建设实施方案》。河南能源焦煤公司赵固二矿积极落实推进,2019年11 月完成14030 一次采全高工作面的智能化升级改造,但工作面矿压大,存在煤壁片帮、冒顶情况,技术人员对液压支架自动跟机控制程序进行优化,保证了工作面安全高效生产。
1 工作面概况
14030 工作面位于赵固二矿四盘区中部,工作面上顺槽长度2109.5m,下顺槽长度2284.4m,切眼倾斜长度201m。14030 工作面采用走向长壁后退式采煤方法、一次采全高综合机械化采煤工艺,沿煤层顶析回采,采高4.5~6.1m(基岩厚度为42~52m区域限制最大采高4.5m),基岩厚度大于52m 区域最大采高6.1m,一个循环推进度800mm;液压支架支护顶析,采用全部垮落法处理采空区。
2 工作面液压支架参数
14030 大采高智能化工作面共安装液压支架102 台,ZY18000/30/65D 型中间液压支架92 台,主要技术参数:支撑高度3000~6500mm,支护宽度1900~2150mm,初撑力12370kN(P=31.5MPa),额定工作阻力18000kN(P=45.8MPa),支护强度1.63~1.86MPa,底座比压2.98~3.13MPa,支架中心距2050mm,支架推移步距800mm,推移千斤顶行程900mm,电液控制操纵方式,泵站额定压力31.5MPa,支架重量约65t。
3 工作面液压支架电液控制系统
液压支架电液控制系统实现液压支架各种动作的控制及数据信息的采集和上传。配合采煤机、刮析输送机完成自动跟机拉架和自动推移刮析输送机,是智能化不可或缺的重要组成部分[1]。ZE07 型液压支架电液控制系统主要元件安装配置情况:每架支架安装有立柱压力传感器、推移行程传感器、红外接收器、4 个倾角传感器、电控先导阀;支架与支架之间使用控制线串联,每隔4 架安装1 个隔离耦合器和电源箱,每隔6 架各安装1 台交换机和云台摄像仪。通过工作面端头架处的交换机,将工作面每架支架的动作与状态数据信息及实时视频信息传输到上顺槽设备列车集控中心,实现实时监测和控制。
液压支架电液控制系统可根据工作面的实际情况和采煤工艺具体要求,通过动作时间和顺序设置,实现单台或多台支架推溜、移架、伸收护帮和伸缩梁动作的自动控制,其主要功能如下:
a.控制器显示界面: 显示立柱压力、推移行程、采煤机位置、跟机、上行(下行)状态等。
b.单架控制功能: 分为邻架、隔架、成组和集控中心远程控制。
c.成组控制功能: 以单支架为操作架,向左或向右连续相邻的多台支架为1 组、执行支架的某个单一动作或联合动作。如推移刮析输送机、伸护帮、伸伸缩梁、喷雾等。
d.自动补压功能: 实时检测支架立柱的下腔压力,在支撑过程中如因某种原因发生立柱下腔压力降落,并当压力降至某一设定的阈值时,系统会自动执行升柱动作,从而将立柱下腔压力补充到规定安全压力值以上。
e.自动跟机功能: 随着采煤机割煤作业进行,根据采煤机与液压支架的相对位置完成收护帮析、收伸缩梁、推移运输机、降架、移架及升架等连续动作。
4 液压支架自动跟机控制策略
4.1 自动跟机中移架推溜动作的执行顺序
根据14030 工作面现场实际情况,决定自动跟机移架推溜动作的执行顺序:工作面煤壁和顶析条件较好时,无严重片帮和冒顶时,执行先移架后推溜;工作面煤壁和顶析条件较差,片帮和冒顶严重时,工作面支架需全部拉超前架加强顶析和帮部支护,执行先推溜后拉架。
4.2 工作面自动跟机割煤工艺流程
4.2.1 采煤机从机头向机尾方向运行
采煤机从机头向机尾方向运行,即采煤机越过6#(机头斜切完成架),开始进入中部割煤,采煤机过后达到移架距离(距离红外接收器位置14 架)的支架进行跟机拉架,达到推溜条件(从开跟机时的采煤机位置开始,采煤机位置每变化3 架推一次)开始推溜(移架距离+移架区域+推溜距离),推溜架数为6架。
4.2.2 采煤机从机尾向机头方向运行
采煤机从机尾向机头方向运行,即采煤机越过97#(机尾斜切完成架),开始进入中部割煤,采煤机过后达到移架距离(距离红外接收器位置14 架)的支架进行跟机拉架,达到推溜条件(从开跟机时的采煤机位置开始,采煤机位置每变化3 架推一次)开始推溜(移架距离+移架区域+推溜距离),推溜架数6架。
4.3 液压支架自动跟机程序优化设置
通过优化收侧护和护帮、降柱、抬底、移架和升柱等动作的控制逻辑,达到了理想支护效果,且保持支架的最佳姿态,液压支架“自动降- 移- 升”共分为七个阶段,具体参数设置见表1。
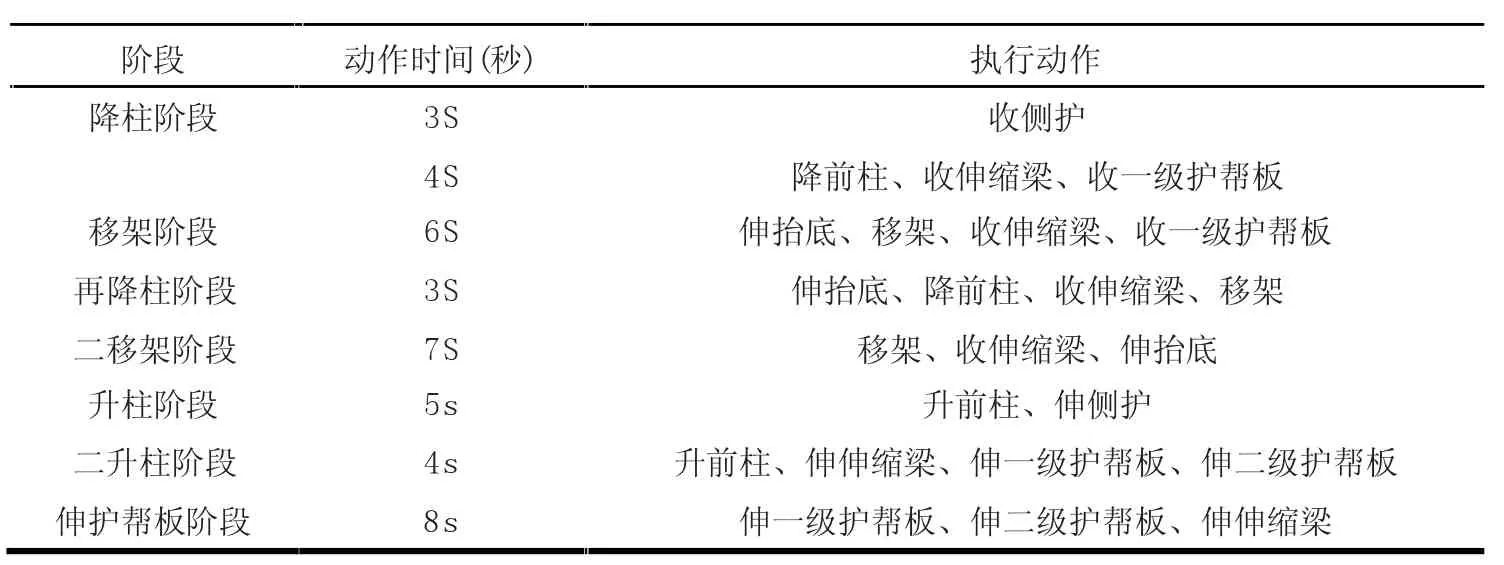
表1 液压支架“自动降- 移- 升”参数设置表
5 液压支架自动跟机过程中存在问题与优化方案
根据14030 工作面现场实际情况,工作面煤壁和顶析条件较差,片帮和冒顶严重时,工作面支架需全部拉超前架加强顶析和帮部支护,系统运行过程中存在问题,在生产过程中对液压支架跟机程序进行优化,逐步适应工作面条件。大采高智能化工作面运行期间遇到问题及解决方案如下:(1)自动跟机出现支架拉不到位或拉到位重复拉架破坏顶析。工作面自动跟机移架过程中,根据工作面情况不同,设置自动跟机移架动作2 次。部分支架自动跟机移架时可一次移架到位,程序仍然进行二次降架、拉架破坏顶析;部分支架拉因两侧支架挤压出现拉不动现象。优化方案:设置“自动降- 移- 升”降架压力小于5MPa(初定)停止降架动作、降架前增加3s 收侧护动作,解决降架不到位导致的支架拉不动情况;根据推拉油缸位移传感器,增加拉架行程大于750mm 停止拉架动作,避免一次拉到位后重复降架拉架破坏顶析;降架时增加移架动作,实现快速拉架功能。(2)液压支架自动补压功能,在顶析破碎条件下不适用工作面生产过程中,支架压力达到要求是保证顶析支护的首要条件。电液控制系统自动补压功能投用,在顶析破碎区域循环补压升柱导致冒顶、错差、倒架等情况发生。优化方案:根据工作面支架压力规律,当支架初撑力达到16MPa 时,顶析基本不存在破碎问题。优化自动补压程序,设置当支架压力≥16MPa 时,自动补压功能方可启动,达到24MPa 时,停止补压。解决了顶析破碎条件下自动补压功能应用的问题。
6 结论
通过对焦煤公司赵固二矿14030 大采高智能化工作面液压支架自动跟机过程中存在问题分析,制定可靠的自动跟机策略,优化了自动跟机程序,逐步适应工作面煤壁片帮和顶析冒落的特殊条件,保证了大采高智能化工作面安全高效生产。