定量铺放自走式大葱联合收获机研制
2020-05-19侯加林陈彦宇李玉华李广华
侯加林,陈彦宇,李玉华,王 文,李广华
(1. 山东农业大学机械与电子工程学院,泰安 271018;2. 山东省农业装备智能化工程实验室,泰安 271018;3. 山东华龙农业装备股份有限公司,青州 262500)
0 引 言
中国是世界上最大的大葱生产国和出口国,2018 年大葱种植面积达60 万hm2,成为带动地区经济发展的重要经济作物[1]。大葱收获有人工收获、分段收获和联合收获3 种方式。目前,中国的大葱收获仍以人工为主,分段收获技术基本成熟并在部分地区得到推广应用,但分段收获仅对大葱进行简单松土挖掘,后期仍需人工拔取抖土、分堆打捆,作业工序复杂,劳动量大,制约了大葱产业的进一步发展。因此,研发一种性能可靠、通用性强的大葱联合收获装置具有重要意义[2-3]。
欧美发达国家研发的大葱联合收获机主要针对韭葱收获,不适于国内的大葱收获[4-6],日本针对中小地块研发的HG 型大葱联合收获机,配套动力小,作业效率低,国内难以大面积推广应用[7]。近几年,随着大葱种植面积的增长以及规模化生产的发展,科研院校和企业分别研发了大葱联合收获设备,山东农业大学研制的双行自走式大葱联合收获机[8],不能有效完成双行汇集作业,伤葱率较高,无法满足市场需求。青岛理工大学研发的双行自走式大葱联合收获机仅进行了理论分析和图纸设计,尚未进行样机试制[9]。山东华龙农业装备股份有限公司与青岛农业大学联合研制的4CL-1 型大葱联合收获机[10],与日本HG 型大葱联合收获机的结构原理相同,主要针对中小地块,作业效率低,无法实现分堆铺放,不适合大面积作业。
目前国内针对根茎类收获机械的研究较多[11-18],叶茎类收获机械的研究相对较少,本文参考已有的大葱收获装备,并结合国内大葱种植模式和农艺制度,设计了一种自走式大葱联合收获机,能够一次完成大葱的挖掘、抖土、喂入、夹持输送、二次去土清杂、收集、成堆铺放等作业。加工样机并进行了田间收获试验,并确定了样机最优工作参数。该机的研发将为自走式大葱联合收获机的结构完善和作业性能优化提供参考,具有重要的现实意义。
1 整机结构及技术参数
1.1 大葱种植模式和农艺制度
通过实地调研发现,中国大葱种植品种多样,其中“日本钢葱”的种植范围最广,本文重点针对“日本钢葱”的收获展开研究。“日本钢葱”有人工栽植和机械栽植方式,随着蔬菜移栽机械的发展,大葱机械栽植逐渐取代了人工栽植[19-22]。机械栽植时,大葱的行距为900~1 000 mm,沟顶宽为250~350 mm,沟底宽为120~150 mm,沟深为200~300 mm[23]。在大葱葱白形成期需要进行3~4 次培土作业,以软化葱白,防止大葱倒伏[24]。到收获期,大葱植株的总长度约为900~1 200 mm,其中地下部分长度约为240~270 mm,葱白直径约为15~25 mm,葱白长度约为170~270 mm,葱垄的垄顶宽度约为260~280 mm,垄低宽度约为380~400 mm,垄距约为900~950 mm,如图1 所示。

图1 收获期大葱生长模式 Fig.1 Growth model of green onion in harvest period
1.2 整机结构及工作原理
针对“日本钢葱”的种植模式和农艺制度,设计的自走式大葱联合收获机主要由操作台、动力底盘、散热系统、传动系统、限深装置、挖掘抖土装置、柔性夹持输送装置、夹持角度调节装置、收集卸料装置等组成,其结构如图2 所示。

图2 定量铺放自走式大葱联合收获机结构示意图 Fig.2 Structural schematic of quantitatively-laying and self-propelled green onion combine harvester
作业时,挖掘抖土装置实现大葱的挖掘、抖土作业;疏土装置及时疏导土壤,避免壅土,同时耕整葱地,为后期大葱铺放创造条件;完成一次抖土作业后的大葱进入夹持输送装置依序向后输送;经二次去土清杂处理后依次进入收集卸料装置,成堆的大葱定时定量铺放到耕整后的土壤上,进而完成大葱收获作业。收获机主要技术参数如表1 所示。

表1 定量铺放自走式大葱联合收获机技术参数 Table 1 Technical parameters of quantitatively-laying and self-propelled green onion combine harvester
2 关键部件设计
2.1 挖掘抖土装置
挖掘抖土装置主要由机架、挖掘铲、抖土筛、疏土装置和液压马达等组成,如图3 所示,作业时,挖掘铲和抖土筛联合作业,完成大葱挖掘和一次去土清杂。

图3 挖掘抖土装置结构示意图 Fig.3 Structural schematic of digging and shaking device
2.1.1 挖掘铲结构与关键参数设计
挖掘铲采用三角平面铲的设计原理,针对挖掘铲和掘起物进行受力分析,如图4 所示。根据《农业机械设计手册》,为了保证挖掘铲在行走过程中能够自动清理铲刃泥土,铲刃斜角γ 与土壤对挖掘铲的摩擦角φ 的关系需满足:

铲刃斜角γ 越小,挖掘铲的入土性能越好,但铲长增加,铲尖变锐,易断铲和伤葱;铲刃斜角γ 越大,挖掘铲的入土性能越差,功耗增加。考虑钢与土壤的摩擦系数(0.4~0.7)[25],结合实际情况,设计铲刃斜角γ=60°。根据《农业机械设计手册》和大葱生长特点,为了保证挖掘铲低阻高效地挖起大葱,避免壅土,挖掘铲铲宽应不小于葱垄垄顶宽度,结合预试验情况,挖掘铲铲宽W 应满足:

式中s 为葱垄垄顶宽度,mm,结合试验测试结果取s=270 mm;c 为机器的挖掘偏差,mm,取c=50 mm。因此,设计挖掘铲铲宽为320 mm。
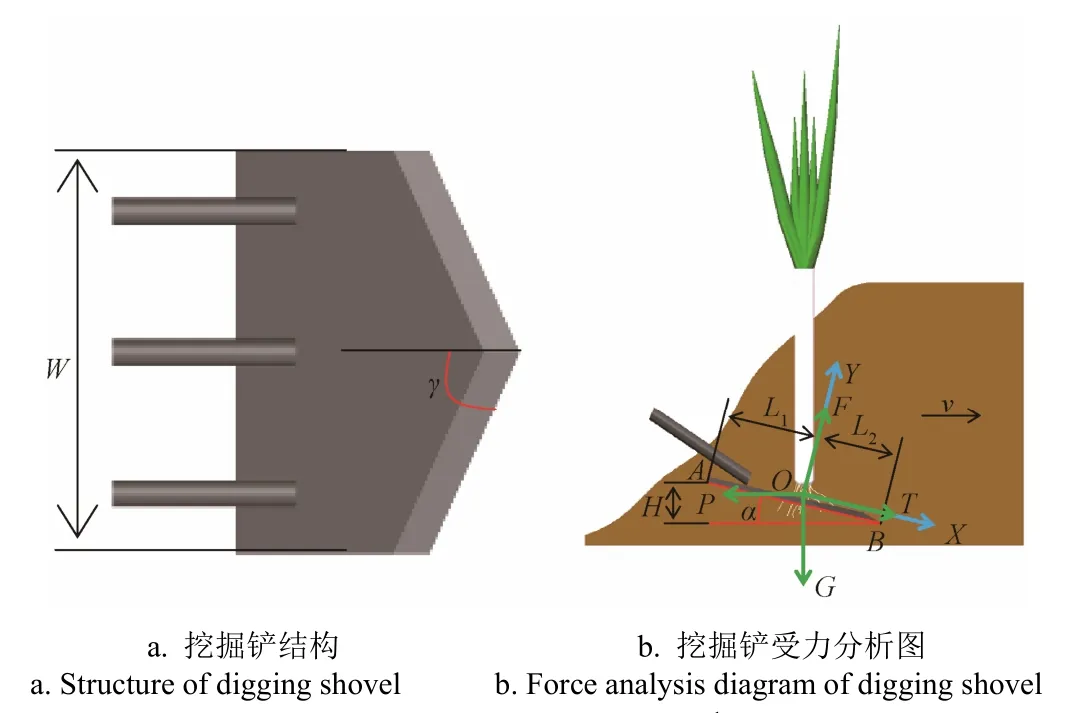
图4 挖掘铲结构及受力分析 Fig.4 Structure of digging shovel and force analysis
挖掘铲水平倾角α 的大小直接影响挖掘铲的作业性能和大葱收获质量[26-27]。为了保证大葱的顺利挖掘和输送,挖掘铲掘起物的受力方程应满足:

由式(3)~(4)得出挖掘铲水平倾角α 为

挖掘铲的总长度为

分析式(3)~(6)可知,挖掘铲水平倾角α 越小,挖掘铲的入土性能越好,作业阻力越小,但挖掘深度不足,容易出现铲断大葱和壅土现象;反之,挖掘铲水平倾角α 越大,挖掘深度越大,铲断大葱的可能性降低,但挖掘铲的入土性能变差,作业阻力变大,能耗增加[28]。根据《农业机械设计手册》[29],参考马铃薯收获机挖掘铲参数,结合大葱和马铃薯种植农艺制度的差异,设计大葱收获机挖掘铲水平倾角α 的调节范围为30°~40°,铲长为200 mm。
2.1.2 抖土筛的结构与关键参数设计
大葱在夹持输送过程中完成抖土作业,抖土筛往复摆动,既完成了抖土作业,又通过筛面抖动细碎土壤,避免壅土,抖土筛采用方形筛孔,其运动简图如图5 所示。

图5 抖土筛运动简图 Fig.5 Diagram of shaking screen motion
根据图5,设抖土筛左摆的最远点为B1,右摆的最远点为B2,由于抖土筛摆动幅度小,摆动周期短,故B 点的周期摆动可近似为在X 轴上的直线往复运动。
根据图5 可得B 点的运动位移xB为

进一步得出B 点的运动速度和加速度为
B 点的近似速度和加速度为

根据《农业机械设计手册》并结合大葱种植农艺,设计曲柄长30 mm,连杆AB 长110 mm,筛柄CD 长850 mm,筛面DF 长400 mm。利用MATLAB 软件并结合液压马达实际功率,求解得到曲柄OA 的角速度3~5 rad/s,B 点在X 轴上周期摆动幅度为80~140 mm,速度范围为 0 ~200 mm/s,加速度范围为 0.3 ~0.8 rad/s2。
2.2 柔性夹持输送装置的设计
柔性夹持输送装置主要由动力输入装置、支撑架、张紧装置、定位调节装置、扶持喂入装置、二次去土清杂装置和柔性夹持输送带等组成,如图6 所示。挖掘后前倾的大葱经扶持喂入装置向后调节一定角度后喂入柔性夹持输送带,输送带拔取大葱的同时抖土筛完成抖土作业,二次去土清杂装置清除大葱根部的土壤、杂草、死皮等,完成二次清杂作业后的大葱依序输送到收集卸料装置。

图6 柔性夹持输送装置结构示意图 Fig.6 Structural schematic of flexible clamping and conveying device
2.2.1 扶持喂入装置
扶持喂入装置主要作用于大葱叶身部位,调整大葱的姿态。如图7 所示,根据试验统计测量,葱白充实期的大葱叶身最大幅宽为400 mm,最小幅宽为320 mm。根据物料弹性变形特性[30-31]及试验测试,左右扶持喂入装置分别安装在支撑架前端的左右两侧,驱动辊安装距离为240 mm,扶持喂入装置开口角度η 为120°,左右扶持带的运动速度vv与输送带同速,保证大葱既不会大面积损伤,又能顺利喂入输送带。
2.2.2 柔性夹持输送带
柔性夹持输送带由内侧的橡胶带和固接于橡胶带外侧由帆布包裹的柔性海绵缝合制成,考虑大葱长度,夹持输送带宽度设计为280 mm。张紧装置安装在支撑架上,可根据葱白直径调节2 个柔性夹持输送带的间距,确保夹持输送的可靠性和连续性。由于扶持喂入装置的调节作用,柔性夹持输送装置拔取大葱时,大葱已向后倾斜约5°~15°,夹持拔取示意图如图8 所示,根据图8 几何关系可知:

联立式(12)~(13)得

结合式(14)以及实际田间作业情况,整机前进速度对大葱夹持输送装置的输送速度影响较大。研究分析整机前进速度对大葱收获质量的影响,可为柔性夹持输送装置的完善设计和参数优化提供相应的理论参考[32]。

图7 扶持喂入装置结构示意图 Fig.7 Structural schematic of support feeding device

图8 大葱拔取过程示意图 Fig.8 Schematic diagram of the green onion extraction process
2.2.3 去土清杂装置
去土清杂装置采用梳刷结构,由橡胶制成的左右2个锯齿辊相对旋转,振动梳刷附着在大葱假茎和葱根上的土壤颗粒和死皮等杂质[33-34],其工作原理如图9 所示。经试验测试,锯齿辊的半径和转速对大葱含杂率和损伤率影响较大,锯齿辊的半径过小,转速过低,梳刷能力差,锯齿辊半径过大,转速过大,能耗和大葱损伤增加,根据试验调试初步设计锯齿辊半径r 为75 mm,转速vq为240 r/min。为了保证良好的去土清杂效果和降低损伤率,左右锯齿辊的安装间距应满足:

式中m 为左右锯齿辊安装间距,mm; dcb为葱白直径, dcb=25 mm; Δ 为大葱左右摆动距离,mm,试验测试Δ=15 mm。因此,左右锯齿辊的安装间距m 为205 mm。
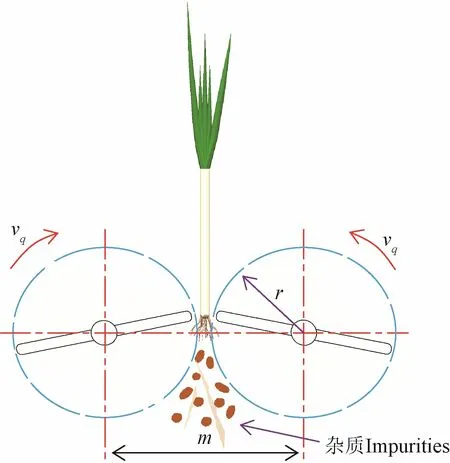
图9 去土清杂工作原理图 Fig.9 Working principle diagram of soil removing and cleaning
2.3 收集卸料装置设计
收集卸料装置主要由导葱装置、载葱台、接葱装置、阻葱装置、铺放装置、气缸等组成,如图10 所示。载葱台和阻葱装置为收集部件,接葱装置为卸料部件,载葱台收集后的大葱依次落入接葱装置,经铺放装置成堆铺放到葱地上,依序循环,实现大葱有序铺放。气缸伸缩周期可调,根据市场调研确定有序铺放后每堆大葱的质量为5~7 kg,满足目前的市场需求[35]。

图10 收集卸料装置结构示意图 Fig.10 Schematic diagram of collecting and unloading device
2.3.1 载葱台
载葱台的结构如图11 所示,驱动轴带动传送带收集大葱,为了确保气缸伸缩时下落的大葱质量满足作业要求,同时尽量减少大葱损伤,结合大葱生长高度和试验调试结果,载葱台传送带的速度vcs初步设计为0.5 m/s,传送带宽度dcs设计为1 200 mm,驱动轴和从动轴的安装间距lcs设计为500 mm。

图11 载葱台结构示意图 Fig.11 Schematic diagram of green onion loading platform
2.3.2 接葱和卸葱作业
如图12 所示,通过连杆机构实现阻葱装置和接葱装置的有序开合,为了保证大葱能够及时有序地铺放,避免堵塞,根据试验调试,阻葱装置的开合角度τzc初步设计为60°,接葱装置的开合角度τjc初步设计为30°,载葱台和挡板安装角度τzd初步设计为120°。
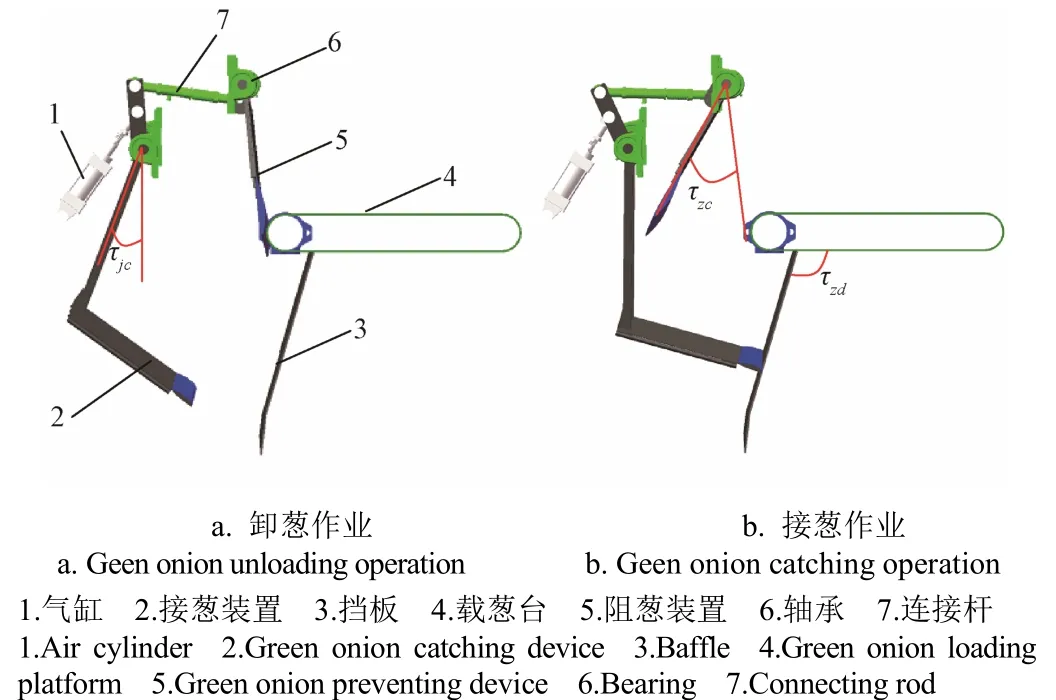
图12 接葱和卸葱作业过程示意图 Fig.12 Schematic diagram of green onion catching and unloading operations
机器平稳作业时,通过气缸的周期性伸缩实现接葱和卸葱作业,气缸缩回,阻葱装置打开,接葱装置闭合,载葱台上的大葱全部落入接葱装置,完成接葱作业;气缸伸出,阻葱装置闭合,载葱台继续收集大葱,接葱装置打开,大葱经铺放装置成堆铺放到地面,完成卸葱作业。气缸伸缩周期直接影响每堆大葱的铺放质量,进而影响大葱收获质量,根据试验测试,气缸伸缩周期与每堆大葱铺放质量的对应关系如表2 所示。

表2 气缸伸缩周期与大葱铺放质量的对应关系 Table 2 Corresponding relationship between the cylinder expansion cycle and the quality of green onion laying
3 大葱收获试验与结果分析
3.1 试验条件
为了验证定量铺放自走式大葱联合收获机的工作性能和设计参数的可靠性,2019 年7 月在安丘市大葱试验基地进行田间试验,试验基地土壤类型为沙壤土,土壤含水率22.34%,大葱品种为日本钢葱,大葱植株总长度约1 000~1 200 mm,葱白直径约15~22 mm,葱白长度约200~280 mm,株距48 mm,垄高370 mm,垄距900 mm,垄顶宽度270 mm,垄底宽度380 mm,发动机配套动力42 kW。
试验仪器与设备包括自走式大葱联合收获机、电子称、水分测定仪、卷尺、游标卡尺、钢尺等,田间试验如图13 所示。

图13 田间试验 Fig.13 Field test
3.2 试验方法及标准
目前,中国还没有针对大葱收获装备制定详细的国家技术标准,依据中国农业机械学会发布的《自走式大葱收获机》标准和有关农业机械试验方法[36-38],采用Box-Behnken 试验设计方案。收获机对行作业很少发生漏挖、漏拔和夹持掉落现象,对大葱收获损失率进行考察意义不大,故以大葱含杂率、损伤率作为评价指标,对整机前进速度、挖掘铲水平倾角、抖土频率、气缸伸缩周期进行响应面试验研究,根据前期调试试验结果,确定各试验因素和水平如表3 所示。
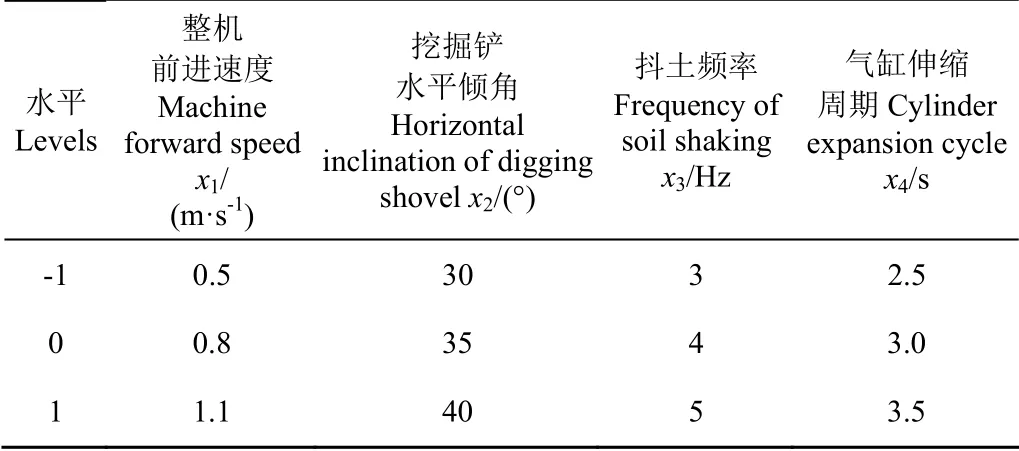
表3 响应面试验因素和水平 Table 3 Factors and levels of response surface test
机器每次行走距离为50 m(准备区15 m,测试区20 m,调整区15 m),每组试验重复进行3 次,对测试区内收获大葱的含杂率、损伤率进行计算。
1)大葱杂质是指大葱收获后含有的泥土、死皮及石粒等,将测试区内收获的大葱进行收集,测得大葱总质量为W (kg),去除杂质测得干净大葱的质量为Wj(kg),大葱含杂率Tzz(%)计算公式为

2)大葱损伤是指大葱收获作业过程中,葱根铲断、葱叶破损、葱白揉搓等损伤,将测试区内损伤的大葱进行收集,测得损伤大葱总质量为Wss(kg),大葱损伤率Tss(%)计算公式为

3.3 试验结果与分析
根据Box-Behnken 中心组合设计四因素三水平分析试验,试验方案采用29 个试验点,其中包括24 个分析因子,5 个0 点估计误差[39],试验方案及响应值如表4所示。
3.3.1 回归模型的建立与显著性检验
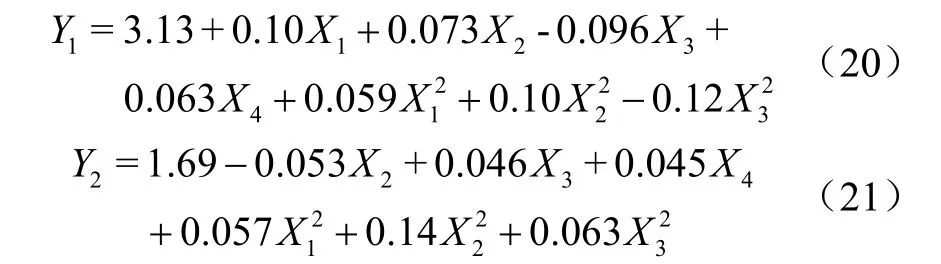
根据表4 的试验方案与试验结果,利用Design- Export8.0.6.1 数据分析软件进行多元回归拟合分析寻求最优工作参数[40-41],建立大葱含杂率Y1、损伤率Y2对整机前进速度X1、挖掘铲水平倾角X2、抖土频率X3、气缸伸缩周期X4的二次多项式回归模型,如式(18)~(19)所示,方差分析如表5 所示。

由表5 可知,大葱含杂率Y1、损伤率Y2模型的P 值均小于0.01,表明回归模型高度显著;失拟项P 值均大于0.05,表明回归模型拟合度高;决定系数R2分别为0.950和0.944,表明回归模型对样本数据解释程度高达94%以上,回归模型可用来预测和分析收获大葱的含杂率和损伤率。因素X1、X2、X3、X4、X12、X22、X32对大葱含质率Y1影响极显著,其他因素影响不显著,各因素对大葱含杂率影响显著性的大小顺序为X1>X3>X2>X4;因素X2、X3、X4、X12、X22、X32对大葱损伤率Y2影响极显著,其他因素影响不显著,各因素对大葱损伤率影响显著性的大小顺序为X2>X3>X4>X1。
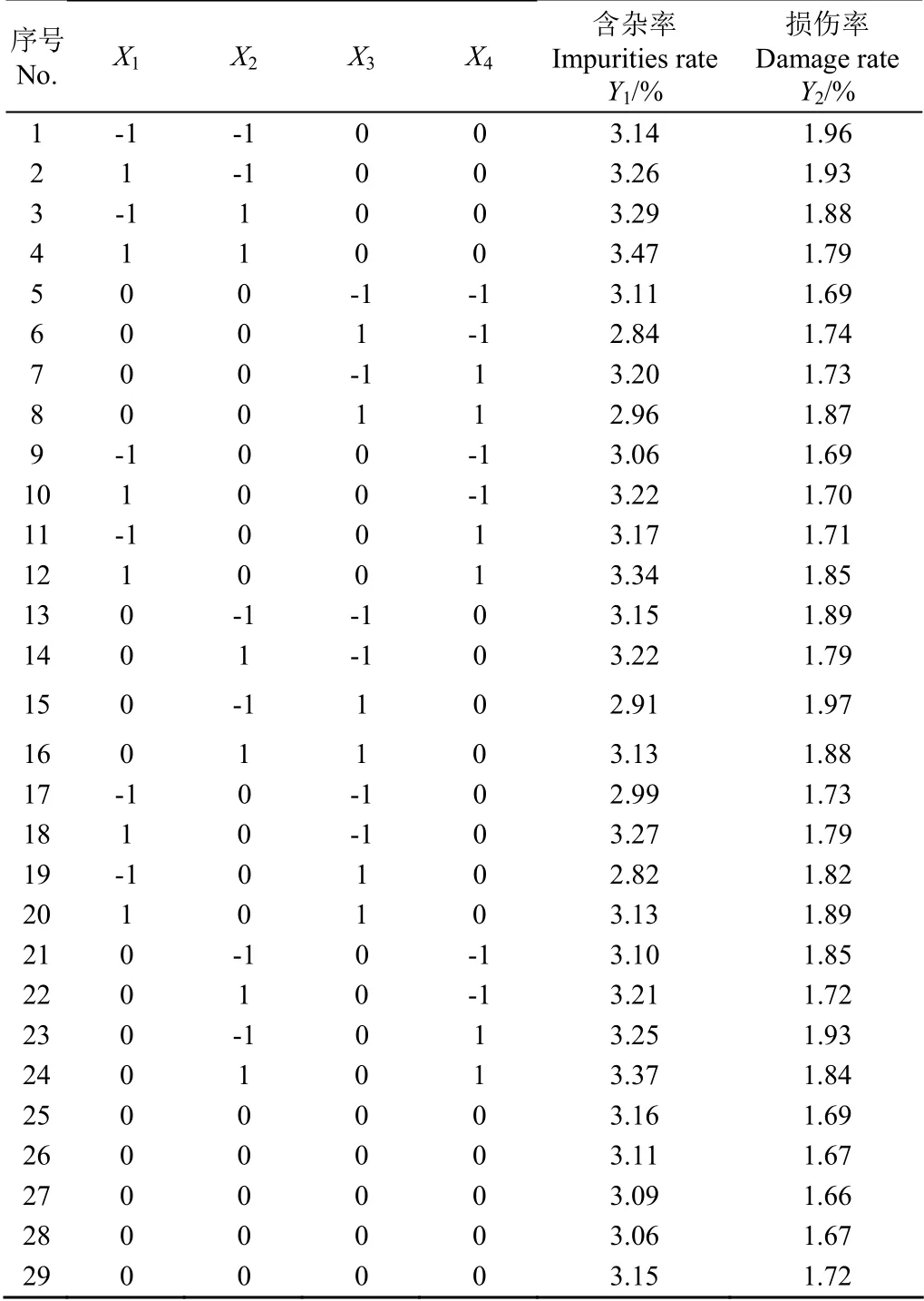
表4 试验方案及响应值结果 Table 4 Experiment design and response values
3.3.2 响应面分析
根据大葱含杂率和损伤率回归模型,将试验因素X1、X2、X3、X4中的2 个因素置于0 水平,分析其他因素对评价指标的影响,绘制相应的响应面图,如图14、图15所示。
1)大葱含杂率响应面分析
图14a 为抖土频率和气缸伸缩周期位于中心水平(X3=0,X4=0)时,整机前进速度和挖掘铲水平倾角之间的响应曲面图。当挖掘铲水平倾角固定在某一水平时,随着整机前进速度的增加,挖掘抖土和二次清杂效果变差,含杂率增加;整机前进速度一定时,大葱含杂率随着挖掘铲水平倾角的增加呈现先缓慢降低而后增加的趋势,在32°~36°有最优值。
图14b 为挖掘铲水平倾角和气缸伸缩周期位于中心水平(X2=0,X4=0)时,整机前进速度和抖土频率之间的响应曲面图。当抖土频率固定在某一水平时,随着整机前进速度的增加,挖掘抖土和二次清杂效果变差,含杂率增加;整机前进速度一定时,大葱含杂率随着抖土频率的增加呈现先缓慢增加而后降低的趋势,在4.0~5.0 Hz 有最优值。
图14c 为挖掘铲水平倾角和抖土频率位于中心水平(X2=0,X3=0)时,整机前进速度和气缸伸缩周期的响应曲面图。当气缸伸缩周期固定在某一水平时,随着整机前进速度的增加,挖掘抖土和二次清杂效果变差,含杂率增加;整机前进速度一定时,随着气缸伸缩作业周期的增加,每堆大葱质量增加,大葱间夹杂的杂质增加,含杂率增加。
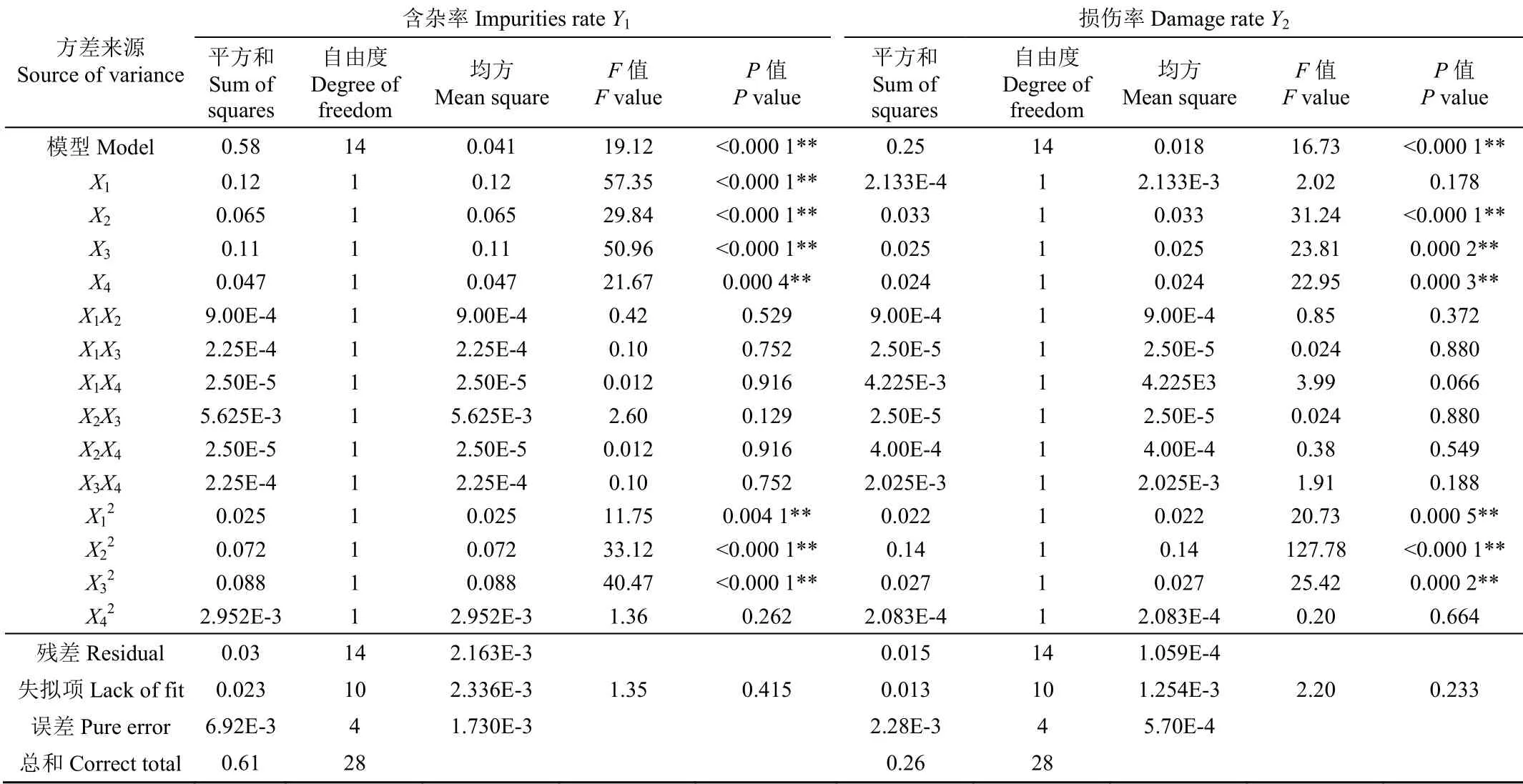
表5 回归方程方差分析 Table 5 Variance analysis of regression equation
图14d 为整机前进速度和气缸伸缩周期位于中心水平(X1=0,X4=0)时,抖土频率和挖掘铲水平倾角之间的响应曲面图。当抖土频率固定在某一水平时,大葱含杂率随着挖掘铲水平倾角的增加呈现先缓慢降低而后增加的趋势,在32°~36°有最优值;挖掘铲水平倾角一定时,大葱含杂率随抖土频率的增加呈现先缓慢增加而后降低的趋势,在4.0~5.0 Hz 有最优值。
图14e 为整机前进速度和抖土频率位于中心水平(X1=0,X3=0)时,挖掘铲水平倾角和气缸伸缩周期之间的响应曲面图。当气缸伸缩周期固定在某一水平时,大葱含杂率随着挖掘铲水平倾角的增加呈现先缓慢降低而后增加的趋势,在32°~36°有最优值;挖掘铲水平倾角一定时,随着气缸伸缩周期的增加,每堆大葱的质量增加,大葱间夹杂的杂质增加,含杂率增加。
图14f 为整机前进速度和挖掘铲水平倾角位于水平(X1=0,X2=0)时,气缸伸缩周期和抖土频率之间的响应曲面图。当气缸伸缩周期固定在某一水平时,大葱含杂率随着抖土频率的增加呈现先缓慢增加而后降低的趋势,在4.0~5.0 Hz 有最优值;抖土频率一定时,随着气缸伸缩周期的增加,每堆大葱的质量增加,大葱间夹杂的杂质增加,含杂率增加。
2)大葱损伤率响应面分析
图15a 为抖土频率和气缸伸缩周期位于中心水平(X3=0,X4=0)时,整机前进速度和挖掘铲水平倾角之间的响应曲面图。当挖掘铲水平倾角固定在某一水平时,大葱损伤率随着整机前进速度的增加呈现先缓慢降低后缓慢增加的趋势,在0.6~0.9 m/s 有最优值;整机前进速度一定时,大葱损伤率随着挖掘铲水平倾角的增加呈现先降低而后增加的趋势,在34°~38°有最优值。

图14 各因素对大葱含杂率的响应曲面 Fig.14 Response surface of various factors to the impurities rate of green onion
图15 b 为挖掘铲水平倾角和气缸伸缩周期位于中心水平(X2=0,X4=0)时,整机前进速度和抖土频率之间的响应曲面图。当抖土频率固定在某一水平时,大葱损伤率随着整机前进速度的增加呈现先缓慢降低后缓慢增加的趋势,在0.6 m/s~0.9 m/s 有最优值;整机前进速度一定时,大葱损伤率随着抖土频率的增加呈现先缓慢降低而后增加的趋势,在3.0~4.5 Hz 有最优值。
图15c 为挖掘铲水平倾角和抖土频率位于中心水平(X2=0,X3=0)时,整机前进速度和气缸伸缩周期的响应曲面图。当气缸伸缩周期固定在某一水平时,大葱损伤率随着整机前进速度的增加呈现先缓慢降低后增加的趋势,在0.5~1.0 m/s 有最优值;整机前进速度一定时,随着气缸伸缩周期的增加,每堆大葱质量增加,大葱间挤压作用增强,损伤率增加。
图15d 为整机前进速度和气缸伸缩周期位于中心水平(X1=0,X4=0)时,抖土频率和挖掘铲水平倾角之间的响应曲面图。当抖土频率固定在某一水平时,大葱损伤率随着挖掘铲水平倾角的增加呈现先降低而后增加的趋势,在34°~38°有最优值;挖掘铲水平倾角一定时,大葱损伤率随时抖土频率的增加呈现先缓慢降低而后增加的趋势,在3.0~4.5 Hz 有最优值。
图15e 为整机前进速度和抖土频率位于中心水平(X1=0,X3=0)时,挖掘铲水平倾角和气缸伸缩周期之间的响应曲面图。当气缸伸缩周期固定在某一水平时,大葱损伤率随着挖掘铲水平倾角的增加呈现先降低而后增加的趋势,在34°~38°有最优值;挖掘铲水平倾角一定时,随着气缸伸缩周期的增加,每堆大葱质量增加,大葱间挤压作用增强,损伤率增加。
图15f 为整机前进速度和挖掘铲水平倾角位于水平(X1=0,X2=0)时,气缸伸缩周期和抖土频率之间的响应曲面图。当气缸伸缩周期固定在某一水平时,大葱损伤率随着抖土频率的增加呈现先缓慢降低而后增加的趋势,在3.0~4.5 Hz 有最优值;抖土频率一定时,随着气缸伸缩周期的增加,每堆大葱质量增加,大葱间挤压作用增强,损伤率增加。

图15 各因素对大葱损伤率的响应曲面 Fig.15 Response surface of various factors to the damage rate of green onion
3.3.3 最优工作参数确定与试验验证
根据方差分析和响应面分析结果,在满足大葱收获要求的前提下,利用Design-Export8.0.6.1 软件对上述大葱含杂率Y1和大葱损伤率Y2的回归模型进行优化,剔除不显著项,结果如式(19)~(20)
根据田间试验情况及中国农业机械学会发布《自走式大葱收获机》标准等相关理论依据选择确定优化约束条件[42],如式(21)所示。

求解目标函数,得到各影响因素最优值:整机前进速度0.69 m/s,挖掘铲水平倾角35.21°,抖土频率4.28 Hz,气缸伸缩周期2.5 s,此时模型预测的大葱含杂率为3.00%,损伤率为1.66%。对优化参数进行适当圆整:整机前进速度0.7 m/s,挖掘铲水平倾角35°,抖土频率4.3 Hz,气缸伸缩周期2.5 s,根据取整优化结果进行试验验证,试验重复进行5 次,结果如表6 所示,田间作业效果如图16 所示。
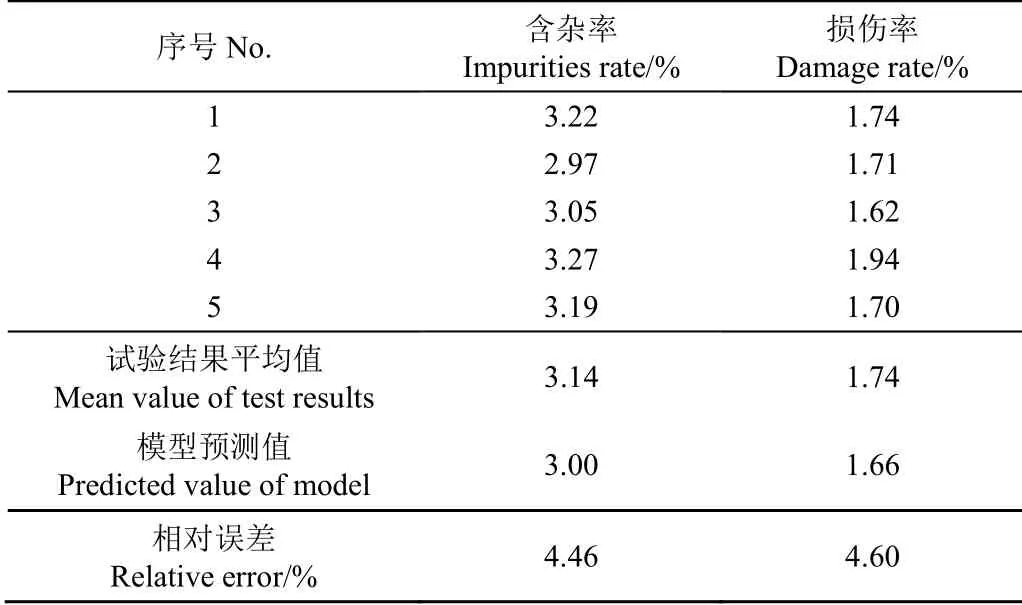
表6 验证试验结果 Table 6 Verification testing results

图16 田间作业效果 Fig.16 Field working effects
试验结果表明,大葱含杂率和损伤率的试验平均值和模型预测值的相对误差均小于5%,说明模型参数优化是具有参考价值的,采用上述最优工作参数组合能够有效降低大葱含杂率和损伤率。
4 结 论
1)本文设计了一种自走式大葱联合收获机,该机能够一次实现大葱的挖掘、抖土、夹持输送、二次清杂、收集、成堆铺放作业。通过理论分析和试验确定了挖掘抖土装置、柔性夹持输送装置、收集卸料装置等关键部件的结构及参数,解决了大葱联合收获的难题。
2)采用Box-Behnken 中心组合设计方案建立了以大葱含杂率和损伤率为评价指标的响应面回归模型,通过方差分析和响应面分析,得出了整机前进速度、挖掘铲水平倾角、抖土频率、每堆大葱质量对评价指标的影响变化规律。
3)应用Design-Export8.0.6.1 数据分析软件对建立的模型进行优化求解,并通过试验验证了优化结果的准确性。最优工作参数组合为:整机前进速度0.7 m/s,挖掘铲水平倾角35°,抖土频率4.3 Hz,气缸伸缩周期2.5 s,此时大葱含杂率为3.14%,损伤率为1.74%,完全能够满足大葱收获标准。
