海洋环境变化下渔港渔船安全监管可追溯系统设计*
2020-05-18陈添铮
严 岩, 陈添铮, 何 伟
(1.福建信息职业技术学院,福建 福州 350001;2.福州市海洋与渔业技术中心,福建 福州 350001;3.闽江学院经济与管理学院,福建 福州 350108)
引言
在海洋变化的环境下,渔港渔船出海具有不可预测性,需要进行渔港渔船安全监管优化设计,结合海洋变化进行渔港渔船安全监管和可追溯系统设计,提高渔港渔船安全监管能力[1].相关的海洋环境变化下渔港渔船安全监管可追溯系统设计方法研究受到人们的极大关注[2].
冯如等[3]研究FDA事故致因模型在海上船舶碰撞事故安全管理中的运用,从个体运行渔船、海运事业到海事局三个方面进行安全信息视角下事故成因的分析,以此构建海上渔船安全监管致因模型,完成船舶碰撞事故安全检测.陈惠红等[4]研究基于物联网技术的船舶危险品货物监测系统,首先提出以RFID技术和GPS定位技术设计了船舶危险品货物监测系统,然后设计嵌入式无线传感器网络检测方案,最后完成船舶危险品货物实时检测.虽然上述研究取得一定进展,但在海洋环境变化下,对渔港渔船安全监管研究不足,为此提出基于嵌入式模糊信息调度的海洋环境变化下渔港渔船安全监管可追溯系统设计方案.结合模糊信息调度方法进行渔港渔船安全监管可追溯信息处理设计,系统主要功能模块有渔港渔船安全监管信息采集模块、嵌入式模糊信息调度模块、交叉编译模块、远程监控模块、视频信息分析模块和人机交互模块,首先进行了总体构架和功能模块分析,然后进行海洋环境变化下渔港渔船安全监管可追溯系统的硬件模块化开发和软件开发设计,最后进行仿真测试分析,得出有效性结论.
1 渔港渔船安全监管可追溯系统总体构架设计
对渔港渔船安全监管设计是建立在系统的软件平台设计基础上[5],结合嵌入式的信息处理模块,进行海洋环境变化下渔港渔船安全监管可追溯系统优化构造,采用交叉编译技术,进行海洋环境变化下渔港渔船安全监管可追溯系统的人机交互设计,采用模糊信息处理技术,进行海洋环境变化下渔港渔船安全监管和可追溯设计.
1.1 系统的总体设计构架
为了实现海洋环境变化下渔港渔船安全监管和可追溯控制,构建海洋环境变化下渔港渔船安全监管系统的总体构架,采用嵌入式的Linux进行系统的集成模块设计,进行海洋环境变化下渔港渔船安全监管可追溯控制,构建海洋环境变化下渔港渔船安全监管可追溯系统的基阵模块[6].采用收发转换控制方法进行海洋环境变化下渔港渔船安全监管和功率放大控制,建立海洋环境变化下渔港渔船安全监管可追溯系统的人机交互模块,采用嵌入式的集成控制方法,进行海洋环境变化下渔港渔船安全监管可追溯系统人机交互设计,在嵌入式的Linux平台中进行系统的总体设计构架,采用构架协议进行渔港渔船安全监管可追溯系统的总线开发,系统的总体设计构架如图1所示.
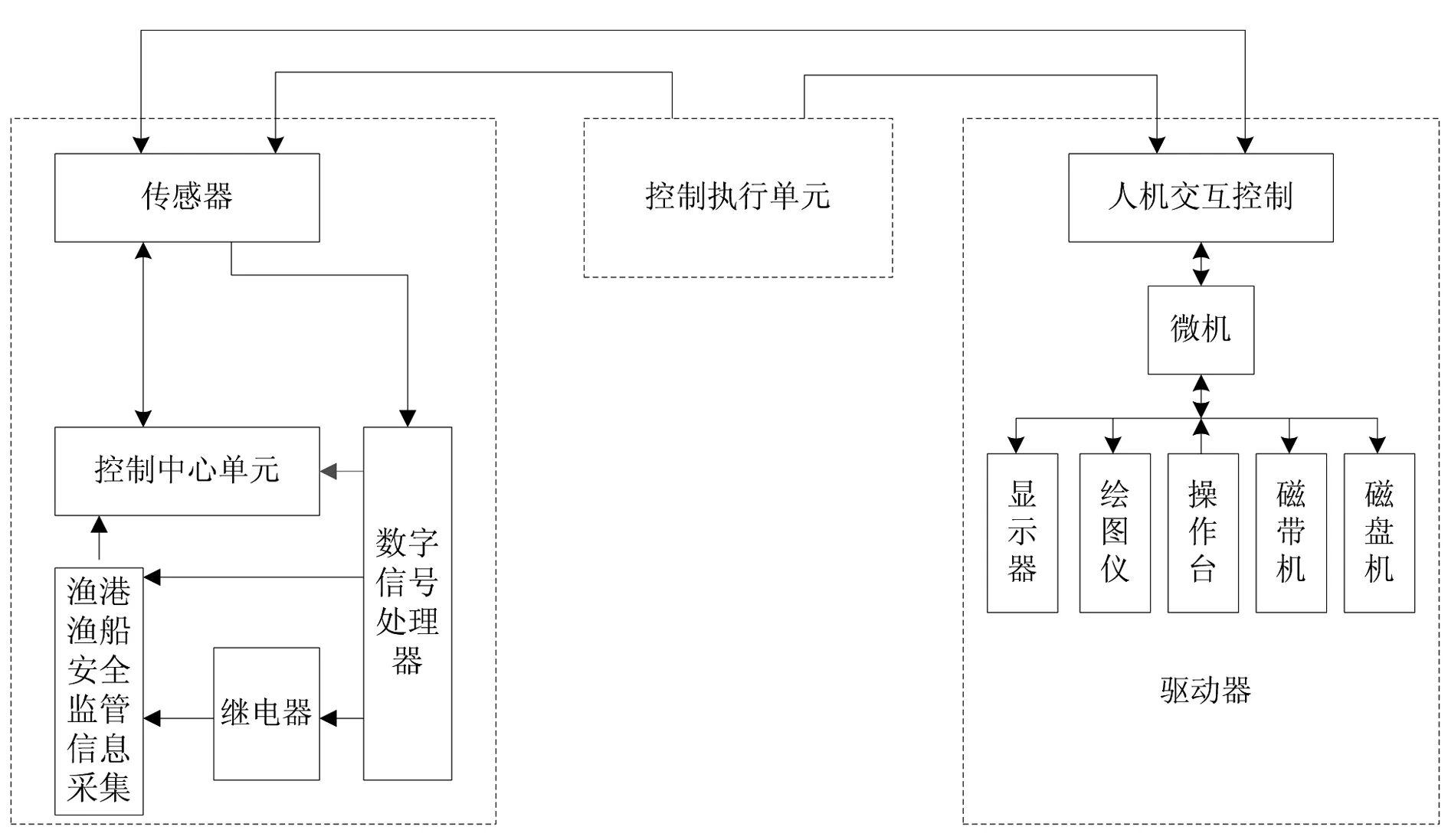
图1 系统总体设计构架
采用一个32位RISC型指令集进行渔港渔船安全监管可追溯系统的软件设计,通过双16位的人机接口进行渔港渔船安全监管可追溯系统的人机交互设计,设计累加器(MAC)进行系统的程序交叉编译,采用PCI总线控制方法,在嵌入式总线中进行渔港渔船安全监管信息采集,采用ADSP-BF537BBC-5A实现海洋环境变化下渔港渔船安全监管的集成信息处理,得到系统的总线控制模型如图2所示.
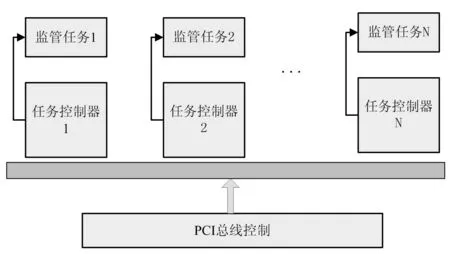
图2 系统的总线控制模型
1.2 功能模块分析
结合模糊信息调度方法进行渔港渔船安全监管可追溯信息处理设计,系统主要功能模块有渔港渔船安全监管信息采集模块、嵌入式模糊信息调度模块、交叉编译模块、远程监控模块、视频信息分析模块和人机交互模块,渔港渔船安全监管信息采集实现对物理信息采样和海洋信息采集功能,在嵌入式的集成信息处理模块实现海洋环境变化下渔港渔船工况信息采样,采用嵌入式的交叉编译技术进行海洋环境变化下渔港渔船安全监管可追溯系统的程序编译,在MCU控制单元进行渔港渔船安全监管可追溯系统的APP控制[7],系统的功能模块化构成如图3所示.
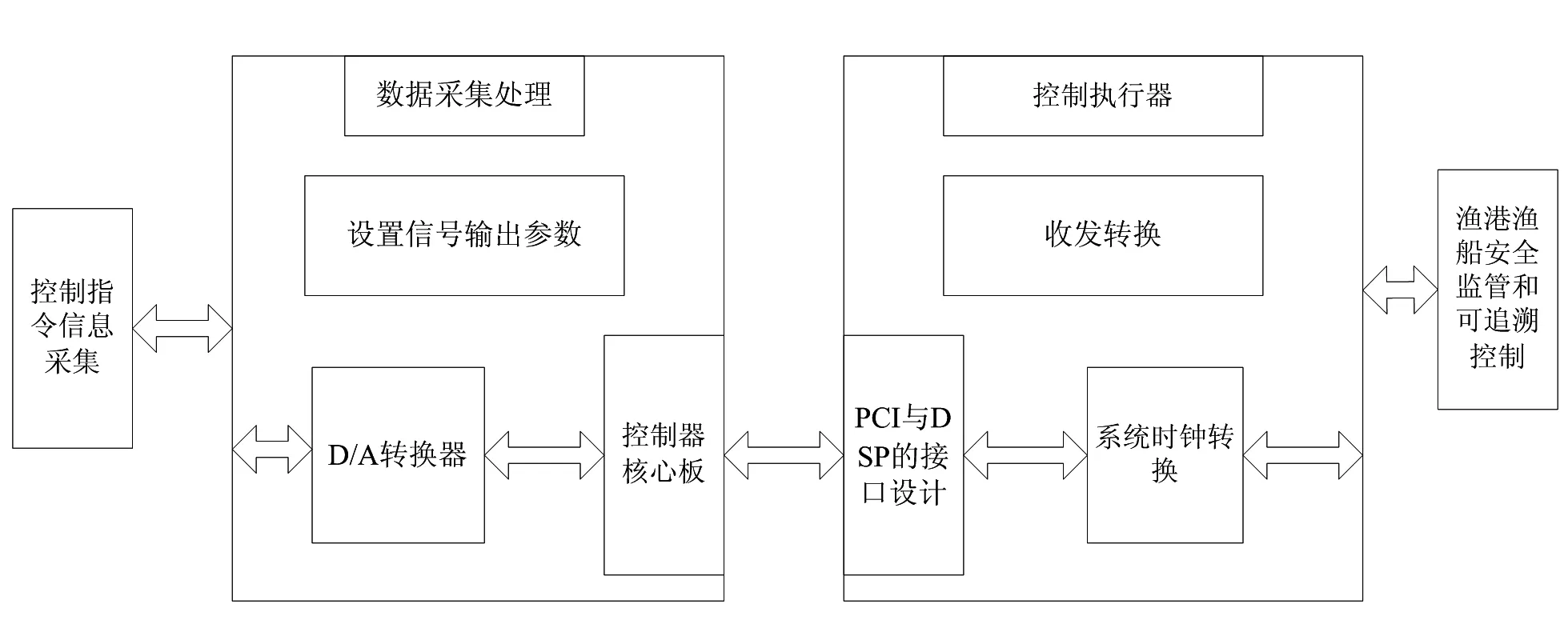
图3 系统的功能模块化构成
2 系统的开发设计与实现
在上述进行了系统的总体构架设计的基础上,进行渔港渔船安全监管可追溯系统的硬件开发设计.结合模糊信息调度方法进行渔港渔船安全监管可追溯信息处理设计,系统主要功能模块有渔港渔船安全监管信息采集模块、嵌入式模糊信息调度模块、交叉编译模块、远程监控模块、视频信息分析模块和人机交互模块,对各个模块进行硬件设计.
2.1 渔港渔船安全监管信息采集模块
渔港渔船安全监管信息采集模块采用嵌入式传感信息采样方法进行物理信息采集,结合信息跟踪识别方法,进行渔港渔船安全监管信息融合处理.同时利用交叉编译控制的方法,进行渔港渔船安全监管可追溯的网络控制[8].在ZigBee协议下,建立渔港渔船安全监管可追溯系统的中央控制器,结合模糊信息调度方法,进行渔港渔船安全监管可追溯系统的AD信息采集,得到渔港渔船安全监管可追溯信息采集模块,如图4所示.
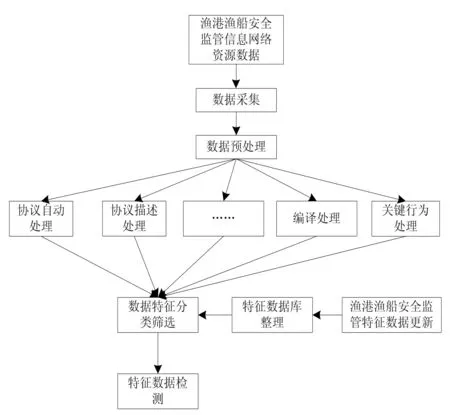
图4 渔港渔船安全监管可追溯信息采集模块
2.2 嵌入式模糊信息调度模块
嵌入式模糊信息调度模块实现对海洋环境变化下渔港渔船安全监管可追溯系统信息集成处理功能,在总线控制协议下,进行嵌入式模糊信息调度的嵌入式信息融合,在嵌入式的Linux平台中进行海洋环境变化下渔港渔船安全监管的成像控制和信息传输,采用专家系统引擎控制的方法进行海洋环境变化下渔港渔船安全监管的程序加载,使用GPRS模块进行嵌入式人机交互设计,在Buffer中执行交叉编译控制,在Cache组件中进行海洋环境变化下渔港渔船安全监管的缓存控制[9],得到嵌入式模糊信息调度避障指标的计算公式为:
(1)
式中,Ga1表示嵌入式模糊信息调度避障指标,M表示嵌入式模糊信息调度平均传输速率,N1、N2分别表示系统辅助参量.在实现海洋环境变化下渔港渔船安全监管可追溯系统信息集成处理能力,嵌入式模糊信息调度模块发挥着重要的作用.
2.3 交叉编译模块
交叉编译模块结合VIX总线控制协议,进行渔港渔船安全监管信息采样和DSP集成信息处理,采用ADSP-BF537作为渔港渔船安全监管可追溯系统的内部时钟振荡器,在时钟输入模块中进行渔港渔船安全监管可追溯系统的时钟中断控制,建立渔港渔船安全监管可追溯系统的有源晶振,通过外部晶体配合渔港渔船安全监管可追溯系统的内部振荡电路进行系统的环境适应性控制[10],得到交叉编译模块的硬件构成,获取交叉编译处理规则如公式(2)所示:
Ga2=Ga1×ky(i×l)
(2)
式中,Ga2表示交叉编译处理规则,ky表示渔港渔船安全监管可追溯系统交叉内外监测循迹指标,i、l分别表示内外两种循迹方式监测指标相关监测系数.
2.4 渔港渔船安全监管远程监控模块
远程监控模块采用DSP系统进行集成控制,在时钟电路中采用数字电路进行渔港渔船安全监管可追溯系统的数字信息处理,设定渔港渔船安全监管可追溯系统的内部时钟为120 MHz,I/O电压为3.3 V,渔港渔船安全监管可追溯系统的最大倍频数为64倍,利用继电保护控制方法进行渔港渔船安全监管信息采集过程中的中断保护控制,根据直流输电性能参数进行远程监控模块的输出参数自适应调节,得到远程监控模块构成.
2.5 视频信息分析模块和人机交互模块
视频信息分析模块和人机交互模块是系统的输出终端,结合特征信息采样和模糊信息融合方法,进行渔港渔船安全监管可追溯控制,在海洋环境变化下,进行渔港渔船安全监管过程中的大数据分析和优化调度,提高渔港渔船安全监管可追溯能力.采用ITU-656 PPI模式识别方法进行海洋环境变化下渔港渔船安全监管可追溯系统的智能控制,采用DS18B20作为海洋环境变化下渔港渔船安全监管可追溯系统的外围器,采用32位嵌入式设计方法进行海洋环境变化下渔港渔船安全监管可追溯系统的输出人机交互设计,得到人机交互模块如图5所示.
图5 人机交互模块硬件设计
综上设计,实现了海洋环境变化下渔港渔船安全监管可追溯系统的硬件集成设计.
3 系统测试分析
为了测试设计的海洋环境变化下渔港渔船安全监管可追溯系统的应用性能,在集成Visual DSP++仿真平台中进行海洋环境变化下渔港渔船安全监管可追溯系统的输出性能测试,采用ADSP-BF537BBC-5A实现渔港渔船安全监管可追溯系统的嵌入式开发,使用ADI公司的EE-NOTE68设计振荡器进行输出稳定性测试,设定系统的D/A转换速率为200 kHz,特征采样率为120 kHz,根据上述分析和参数设定,进行渔港渔船安全监管可追溯系统的输出稳定性测试,得到结果如图6所示.
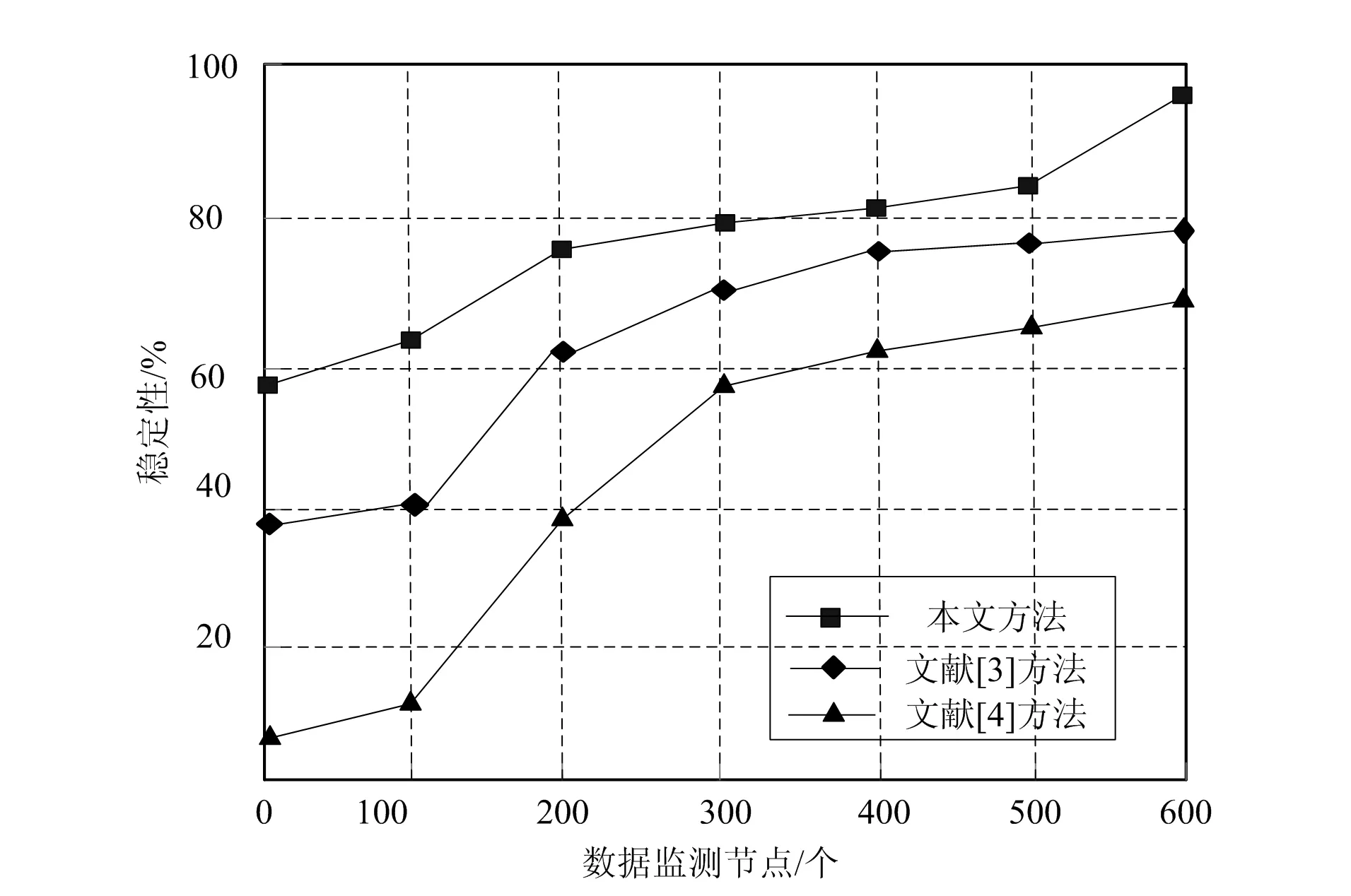
图6 渔港渔船安全监管可追溯系统的输出稳定性
由图6可知,对比文献[3]方法、文献[4]方法,采用本文方法进行渔港渔船安全监管可追溯系统设计的输出稳定性较好,人机交互能力较强,在进行多次数据监测节点的测试中,文献[3]方法和文献[4]方法的输出稳定性最高达到79%和70%,本文方法渔港渔船安全监管可追溯系统的输出稳定性最高达到96%.为进一步验证本文方法海洋变化环境下渔港渔船安全监管可追溯能力,利用文献[3]方法、文献[4]方法对比试验所需时间,其时间对比结果如表1所示:
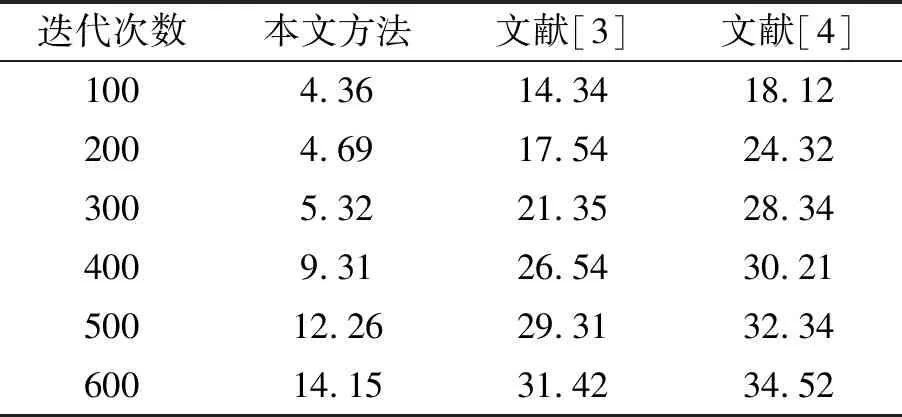
表1 时间开销测试对比结果 s
由表1可知,是利用三种方法进行测试的系统时间开销,本文方法进行渔港渔船安全监管可追溯的时间开销较短,在最终进行600次实验时,本文方法所需时间开销仅仅为14.15 s,相对比文献[3]方法、文献[4]方法所需时间较少.
采用数据读写时序对渔港渔船安全监管可追溯系统监测效果进行验证分析,同时对比文献[3]方法和文献[4]方法进行渔港渔船数据读写时序,其对比结果如图7所示,其中图7(a)为本文方法进行渔港渔船数据输入输出读写时序情况,图7(b)为文献[3]方法进行渔港渔船数据输入输出读写时序情况,图7(c)为文献[4]方法进行渔港渔船数据输入输出读写时序情况.
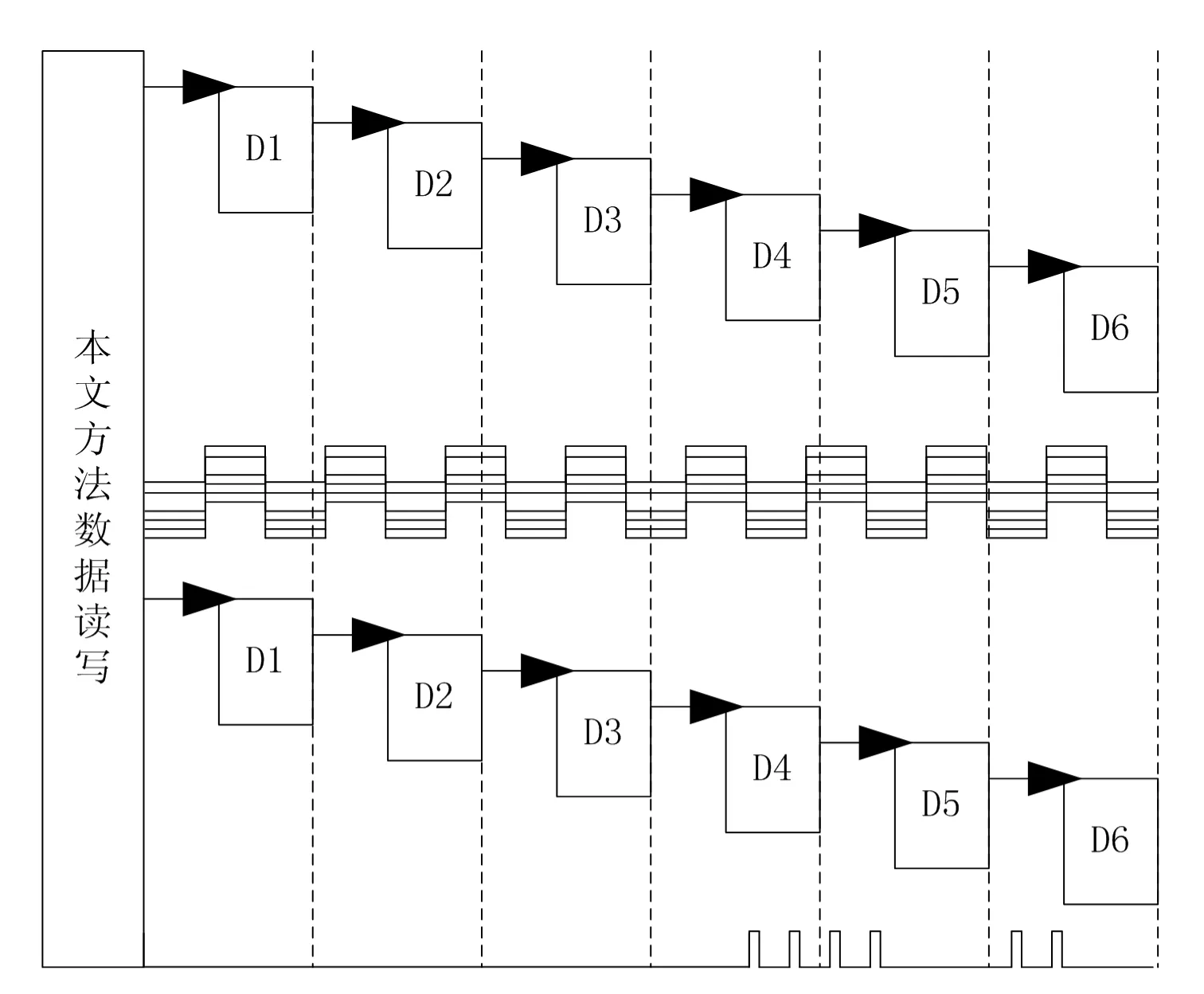
(a)本文方法
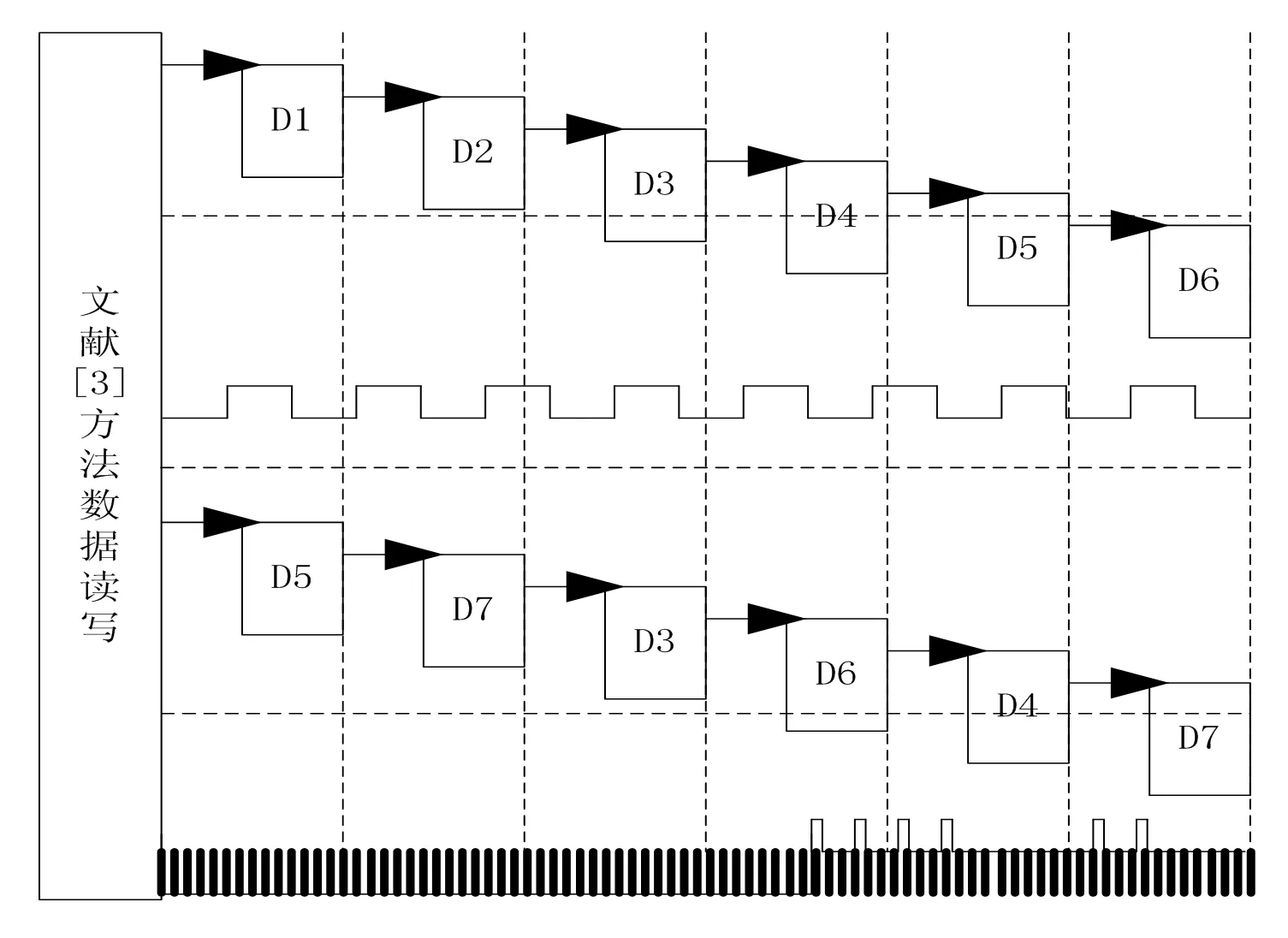
(b)文献[3]方法
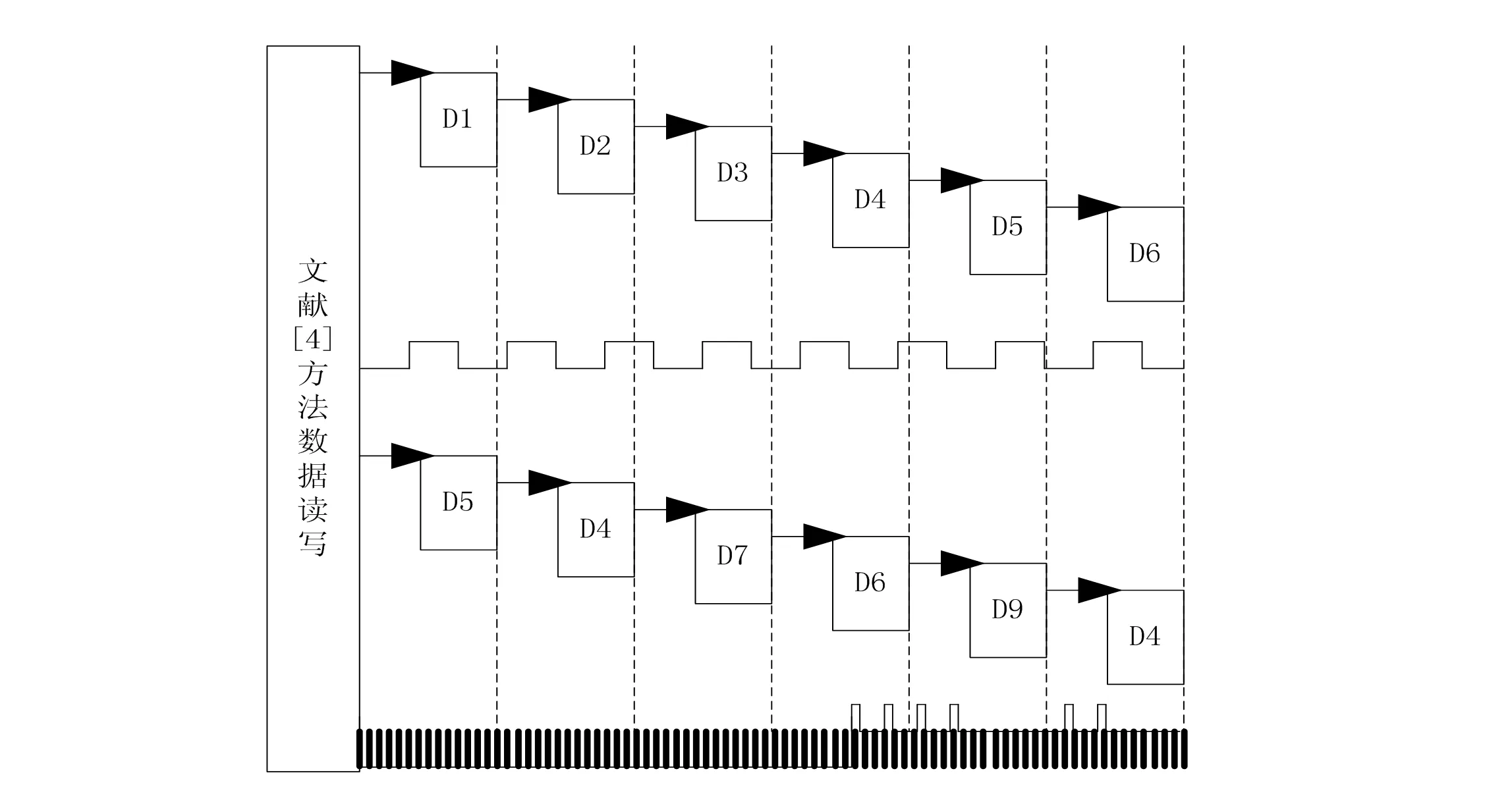
(c)文献[4]方法
图7 三种方法进行渔港渔船数据读写时序输入输出对比结果
由图7可知,在实际海洋环境变化下,文献[3]方法和文献[4]方法进行渔港渔船数据读写时序实际输入结果为D1、D2、D3、D4、D5、D6,而输出结果分别是D5、D7、D3、D6、D4、D7和D5、D4、D7、D6、D9、D4,与实际输入结果一致.而本文方法进行渔港渔船数据读写时序,其输入输出结果保持一致,其原因是本文在海洋环境变化下进行渔港渔船安全监管可追溯系统设计时采用构架协议进行渔港渔船安全监管可追溯系统的总线开发进行信息集成信息处理.
4 结论
结合海洋变化进行渔港渔船安全监管和可追溯系统设计,提高渔港渔船安全监管能力,采用收发转换控制方法进行海洋环境变化下渔港渔船安全监管和功率放大控制,建立海洋环境变化下渔港渔船安全监管可追溯系统的人机交互模块,采用嵌入式的交叉编译技术进行海洋环境变化下渔港渔船安全监管可追溯系统的程序编译,结合信息跟踪识别方法,进行渔港渔船安全监管信息融合处理,利用继电保护控制方法进行渔港渔船安全监管信息采集过程中的中断保护控制,根据直流输电性能参数进行远程监控模块的输出参数自适应调节和输出控制.实验结果表明,所设计的方法稳定性能较好,所需时间开销较少,时间响应能力较好,同时渔港渔船数据输入输出结果保持一致.