异步电动机的建模仿真方法研究
2020-05-16李世涛
李世涛
(大连工业大学艺术与信息工程学院,辽宁 大连 116400)
0 引言
由于我国经济在不断的攀升发展,我国的各种类型的加工工厂发展的也非常迅速,但是在日常的发展过程中,也会受到外在的影响,例如阴雨,雷电的天气就会对工厂的电压造成一定的影响,这就很有可能出现电动机的问题,会给工厂的正常工作带来影响,会给工厂带来很大的损失,也会给内部的工作人员带来很大的人身危害,而对一些特殊的工厂来说,发生异步电动机相关问题,危害更加严重,严重的有可能会发生火灾和爆炸,因此,工厂出现异步电动机“存在的”问题就需要我们加以重视和研究,因此,本文就将以探究异动电动机所“存在的”问题,对这些问题的现状和出现的原因以及解决异步电动机问题的措施三方面进行逐步的分析与讨论[1]。
1 异步电动机的建模仿真概况
在进行异步电动机的建模仿真情况分析过程中首先对于异步电动机进行解释,它是一种感应电动机,这种感应电动机工作的原理就是通过气隙旋转磁场和转子绕组感应电流两者相互作用从而行成的一种电磁转矩,进而可以形成一种将机电能量转换为机械能量的一种交流电机。因此,异步电动机会按照转子的结构进行划分,划分成鼠笼式和绕线式异步电动机。
在进行各领域的研究分析以及进行进一步设计的过程中,为这些复杂的系统服务的工具有系统建模和仿真方式。在进行建模的过程中可以根据模拟想象的方法去进行物理系统的设计;但同时仿真就可以对于各种控制策略和方案及逆行比较对照处理,进而对于其相关的参照系数进行优化。随着时间的増长,对于仿真领域的研究重点就是在进行仿真模型的建立过程中,也就是说,在进行系统模型的建立完成之后可以进行算法的设计,并且让系统模型可以倍计算机使用,进而将这些进行编制处理,设计成计算机系统程序,进而可以让其在计算机上进行运行。但是为了完成理想的目的,就需要在这个过程中进行仿真程序的建立,这就需要进行编程的应用[2]。
在近几年的发展过程中,Matlab软件已经可以对于系统建模和仿真模拟过程中遇到的问题进行很好的解决。也就是说,异步电机的动态数学系统已经可以很好的进行进一步的改善和分析完善。其是一种较为高阶的同时是非线性的多变量的一个系统。在进行这次的设计过程中主要就是借助这个软件中的Simulink组件进行动态数学模型的建立的。
对于异步电动机来说,转子绕组设计的过程并不需要和其他电源进行连接,但是其定子电流则必须要是取自交流电力系统的。在进行其他电机比较的过程中,异步电机的组成相对较为简单。同时其在制造和使用以及维护的过程也就相对较为方柏霓,其在运行过程中的可靠性也相对较高。但是对于这种机器来说,他的旋转磁场在进行运转的过程中还是存在一定的使用场合的差距,也就是说其在使用的过程中和直流电动机的经济和方便是有很大的区别的。因此,在其进行高动态性能的调速系统进行工作的过程中,异步电动机并不能对其完全适应。因此,为了保证其可以更好的发挥它的作用,就需要对于异步电动机的动态数学模型进行细致的研究[3]。
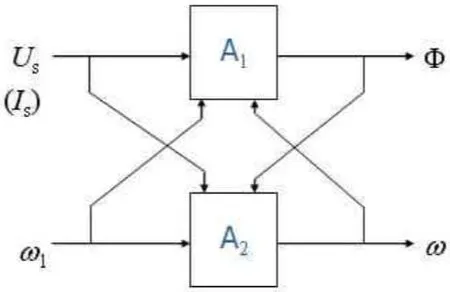
图1 异步电机动态数学模型Fig.1 Dynamic mathematical model of asynchronous motor
2 多变量非线性模型的建立
在进行多变量的非线性模型的建立过程中,需要根据主要的工作过程进行相关系统的建立的监督和设计。对于旋转正交坐标系上的异步电动机来说,其主要是有4阶电压方程和1阶运动方程进行设计的,因此还需要选取5个状态变量来进行计算分析。对于这个工作过程来说,可选择的变量一共有9个,同时这9个变量又可以分为转速、定子电流、转子电流和定子磁链以及转子磁链五个组别。其中,转速是输出变量中必需选取的。而之后的两组可以从另外4组变量中进行选择[3]。
2.1 模型建立的假设前提
在对于异步电动机的多变量非线性数学模型进行研究的过程中,需要做出假设来对其进行进一步分析。主要有以下几点,比如对于空间谐波的忽略可以假设这三相是绕组对称的状态,并且在空间中的夹角为120°,并且其会产生沿气隙周围按照正弦规律进行分布的磁动势。其次,就是对于磁路饱和的状态会有一定的忽视,并且其中产生的自感和互感都是恒定的一种状态。还有就是对于铁心的损耗会有一定的忽视,并且对于频率的变化和温度的变化从而导致的的队友绕组电阻产生关于频率变化的影响。
在队友电机转子的形态进行研究的过程中,主要有绕线型和笼型两种,并且其主要是可以形成等效的三相绕线转子,并且还需要其进行折算,同时将其可以折算到绕组匝数相等[4]。主要的有定子三相的绕组轴线的方式在空间中是固定的,并且一般情况下都是以A轴为坐标轴进行的。对于转子来说,其中的电角度因为空间角的位移而发生相应改变。同时对于各绕线组的电压和电流以及磁链的正方向都有一定的规定,一般是符合电动机管理和右手螺旋定则。除此之外,还需要对于数学模型下的磁链方程以及转矩方程还有运动方程进行细致的分析和研究,从而对其动态模型及逆行掌握。在对于控制对象来说,其中主要有挤点时间和常数 TA以及电枢回路中的电磁时间常数,如果在进行计算的过程中,往往可以对于相应的变量产生影响,从而导致其可以对于经典的线性控制理论进行一定的分析和具体的设计[5]。
2.2 坐标变换的基本思路
在进行坐标变化的思路研究过程中,主要的想法就是将物理模型进行有效的转换,可以将其转换成和直流电机较为类似的模式,从而将其曾经复杂的分析和控制过程进行简化,而坐标的变换也是跟据此来进行的一种思路。但是不同的坐标系中对于电机模型的等效原则是有很大的区别的。但是在不同的坐标系下产生的合成磁动势却是相等的[6-7]。

图2 坐标转换图Fig.2 Coordinate transformation diagram
3 建模
在图2-1中,定子三相绕组轴线A、B、C在空间是固定的,转子绕组轴线 a、b、c以角转速随转子旋转。如以A轴为参考坐标轴,转子a轴和定子A轴间的电角度θ为空间角位移变量。规定各绕组电压、电流、磁链的正方向符合电动机惯例和右手螺旋定则。
3.1 异步电动机三相动态模型的数学表达式
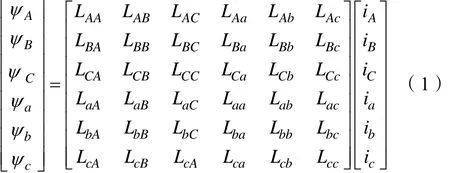
异步电动机的动态数学模型由磁链方程、电压方程、转矩方程和运动方程组成,其中磁链方程和转矩方程为代数方程,电压方程和运动方程为微分方程。
(1)磁链方程Flux linkage equation。
(2)电压方程。

三相转子绕组折算到定子侧后的电压方程为。

(3)电磁转矩方程。

(4)运动方程。

根据上述模型用 matlab软件建立 simulink模型,如图所示。
4 数据建模
在对异步电动机进行分析的过程来看,其实从两相静止的坐标系首先进行分析的,其为了更好的进行分析,建立了Simulink模块图来进行仿真模型的建立,并且针对移动电动机编成了S函数程序和相关的DEE功能的模块,并且对其提出的三种电机的模型运行特性以及实际的电机进行对比分析,发现是一致的,并且还对于异步电动机的建模很好的完成了。
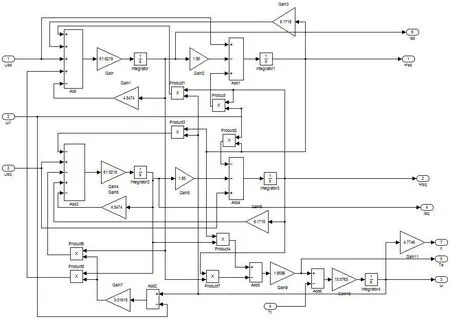
图3 Simulink模型Fig.3 Simulink

图4 数据建模工作流程Fig.4 Data modeling workflow
在进行软件的建模过程中,其方法是根据良好的用户界面和模型结构进行设计的,并且其对于系统参数和仿真参数的使用是完善的。但是这种方式对于高阶数学来说还是显得较为繁杂。而DEE建模方式则较为简单,并且其可以在微分方程的编辑过程中针对方程的状态进行编辑,并且对其的多个数值进行合理的利用。降低最终误差产生的可能性[8-10]。反而S模型的建立是非常简洁明了的,同时出错率相对较低,并且在使用过程中也是较为方便的。因此,为了对其中的参数化进行扩展,就需要更好的利用Simulink的能力来进行研究分析,这是对于研究过程中提出的一种很好的清大的机制,在未来的运用过程中奠定了基础。
5 结语
在对于异动电动机存在的问题进行分析以及对其进行相应的解决方案探究和提出的过程中,相应对于其中的不认识的问题以及解决问题的方法进行探析,并且对于其相关的参数进行分析研究,这是对于异动电动机相关问题解决的最好的一种途径。同时在进行异动电动机方程的建立过程中还是存在一定的问题的,比如对于仿真的结果存在一定的疑问,同时其针对性也并不明显。因此,在进行相关的程序的使用之前就需要针对这些方面进行细致的分析和研究,从而燃气仿真的精确度更高。仿真的结果相对于之前来说更加可靠。
