某无人直升机设备平台随机振动分析
2020-05-14范汪明姜年朝
范汪明,姜年朝
(南京模拟技术研究所,南京 210016)
0 引言
近年来,随着直升机和电子技术的快速发展,相继出现了各种型号的直升机和多样化的精密集成电子设备。根据直升机平台用户的多样化需求,各种不同类型的精密集成电子设备被应用搭载到直升机平台上,由于直升机是一个运动性平台,因此需严格考虑这些设备在直升机平台上工作的稳定性和可靠性,其中如何保证任务设备在直升机平台振动环境下顺利实现功能是一项非常重要的任务。而电子任务设备通常安装在设备平台上,其在直升机上的作用主要是承受电子设备的载荷冲击,因此对其在整机动态振动载荷作用下的强度、刚度需要严格设计[1]。
本文介绍了随机振动谱响应的原理,详细推导了多自由度系统在随机振动谱下的响应值。以某无人直升机设备平台为研究对象,首先根据能量近似原理对其宽频随机加正弦振动谱转化为宽频加窄带随机振动谱,其次对平台系统进行有限元建模以及模态扩展分析,最后基于随机振动谱下进行结构系统的强度分析以及挂载基线的位移响应分析。
1 多自由度系统随机振动分析原理
随机信号对系统进行激励时,用不确定的时间变量表示的函数可表达系统的激励信号和响应信号[2]。针对一个稳定的随机过程,其响应的自相关函数可表示如下:

由于:

即响应功率谱密度函数等于激励功率谱密度函数与系统频率响应函数模的平方的乘积。
响应加速度均方根值为:

式中:ω1和ω2分别为激励谱的下限和上限。
对于单自由度系统,若激励谱已知,系统的频率函数经过简单的计算即可获得,因此其对应的加速度响应可由式(4)直接求出。但本文中研究的对象显然不是一个单自由度系统,而是一个多自由度系统,其随机振动响应谱及响应加速度均方根值的计算方法与单自由度相比有所差别。
在进行随机响应谱计算分析之前,需要对研究对象进行模态计算分析。在模态分析中,进行坐标系计算变换,将多自由度系统进行解耦,获得主坐标系下的频率响应函数[2]。分别令M、K、C表示多自由度系统的质量、刚度和阻尼矩阵,令 χ表示相对于基础的响应加速度,ÿ表示基础加速度激励,则该系统对应的动力学方程为:

为方便推导,将式(5)改写为下面的形式:

式中:ωj和ξj分别为第j阶振型的圆频率和阻尼比。
因此由式(8)得:


将其在频域上积分,可得第j个自由度相对于基础的加速度响应的均方值为:

式中:ω1和ω2分别为基础加速度平稳随机激励的起始圆频率和终止圆频率。
2 随机振动分析
2.1 振动谱转化
随机振动分析是将模态分析结果与一个已知的随机振动谱联系起来计算模型位移和应力的分析技术。主要用于确定系统对随机载荷或随时间变化荷载(如地震、风荷载等)的动力响应情况。文中主要针对某电子设备平台系统在直升机振动环境谱下的动响应分析。首先,根据直升机的振动特点及标准[4]设计了直升机的振动环境谱,具体环境谱由图1所示,数值说明如表1所示。
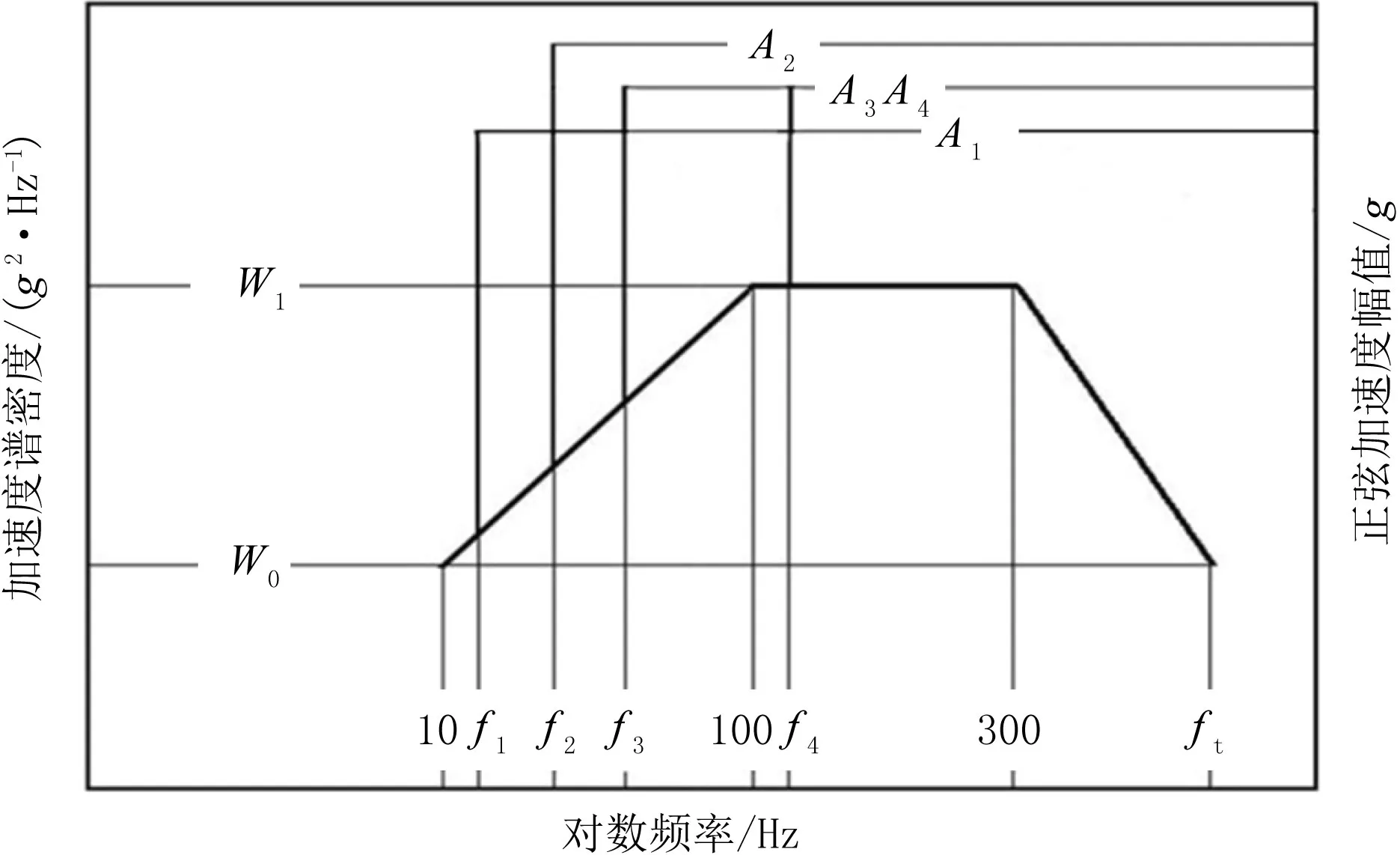
图1 随机+正弦振动试验谱
由图可知,此振动环境谱为宽带随机振动与定频确定性正弦振动的叠加,在使用ANSYS软件进行PSD功率谱密度分析时,无法直接使用,因此根据文献[3],按照能量相等的原则,将该振动谱等效为宽带加窄带随机振动的形式,转化后的激励谱如图2所示。

表1 随机+正弦振动试验谱数值说明

图2 转化后的振动试验谱
2.2 设备平台
某无人直升机拟安装一套具有弹簧阻尼减震系统的Mini Sar系统,该系统主要包含Sar主机、IMU、电池和干涉基线。现要求两侧最外端基线刚度相对变形小于0.1 mm。且要求IMU安装位置靠近干涉基线,安装方式与干涉基线保持刚性连接,用于监测干涉基线的位姿状态;主机安装位置应尽量靠近干涉基线,以缩短天线到主机的电缆长度,具体设备安装如图3、4所示。
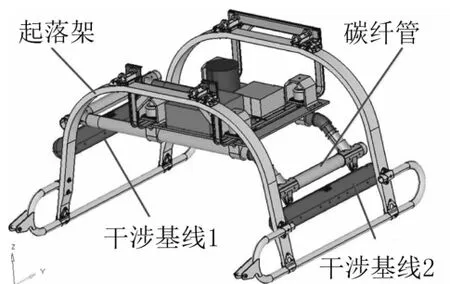
图3 设备在直升机上安装位置示意图

图4 设备计算简化示意图
2.3 有限元模型建模
分析上述模型,对不必要的几何模型进行了合理简化,进行有限元建模时,根据需求,只需取基线挂点即可,去掉2个天线模型,同时用弹簧单元combin14模拟弹簧阻尼隔振器,对U型架和碳纤管采用壳单元shell181进行划分,其他系统(如pos、IMU电子设备以及各种接口件)采用solid185划分,安装座与碳纤管采用共节点处理,由于螺栓采用标准螺栓,不考虑螺栓的强度问题,因此采用刚性约束模拟U型架与飞机之间的刚性连接问题。整个模型共划分了约33万个单元,具体模型如图5所示。
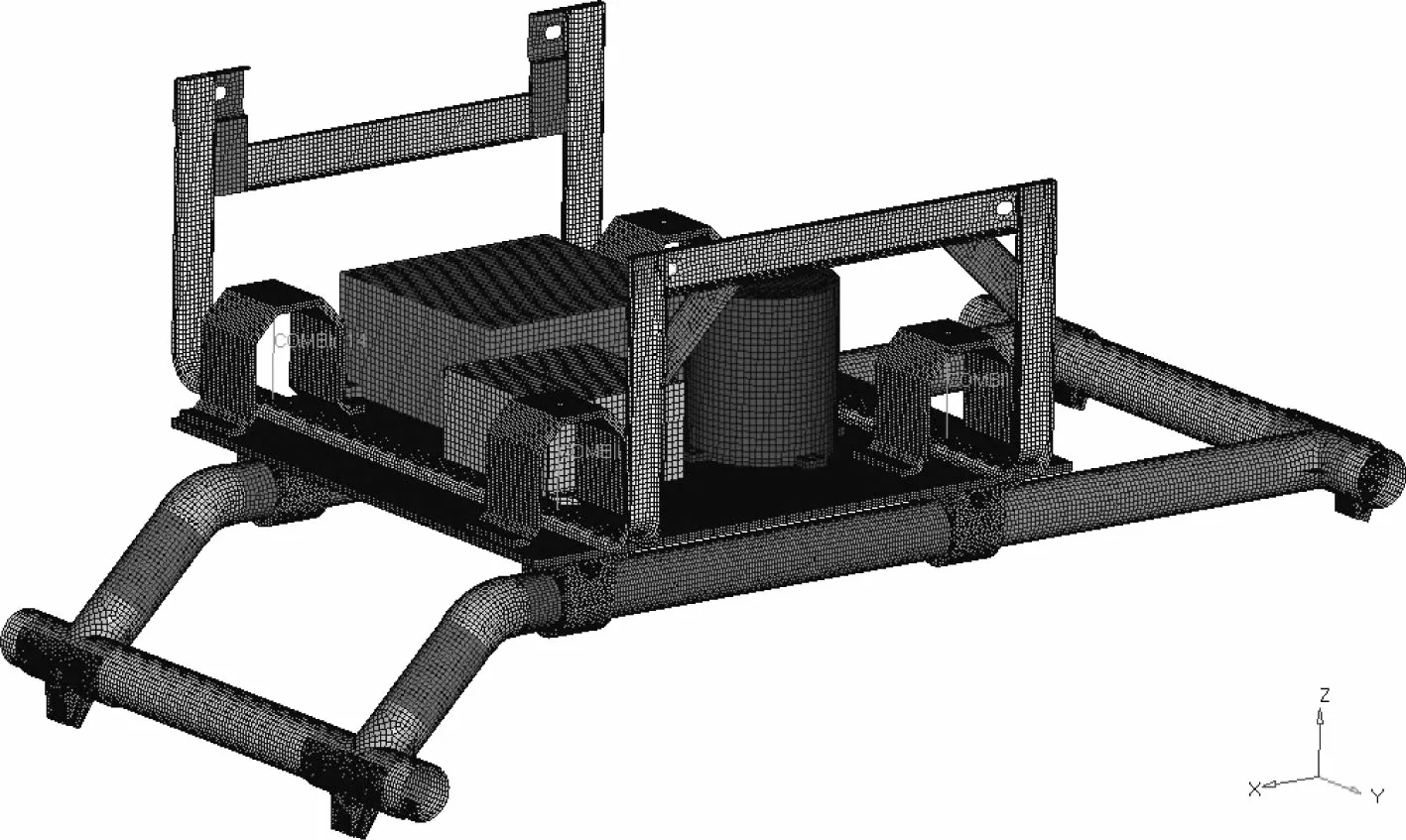
图5 设备系统有限元模型
2.4 材料设置
根据建好的有限元模型,依据表2的各材料参数进行赋予,然后进行模态分析。
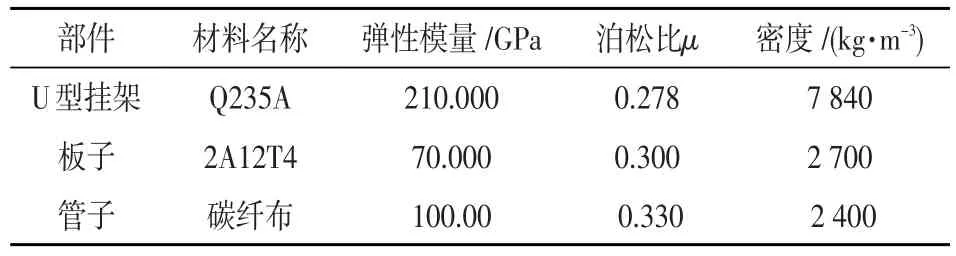
表2 各材料的主要力学参数
2.5 模态分析
模态分析是用于确定设计系统或机器部件的振动特性[6],是随机振动分析的基础,因此对设备系统进行随机振动分析前需计算出系统的固有频率和振型。文中先对设备平台的固定点进行自由度约束,使用ANSYS Workbench软件进行模态分析求解,表3给出了系统的前几阶固有频率,频率覆盖了0~500 Hz的范围,前几阶振型如图6所示。

表3 系统的固有频率
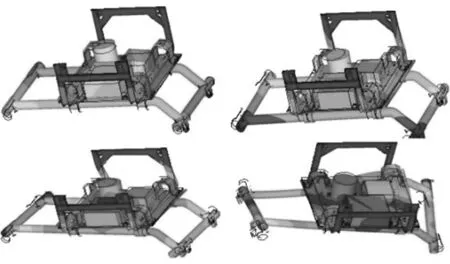
图6 设备系统振形图
2.6 平台系统的随机振动分析
随机振动分析也称为功率谱密度(power spectral density,PSD)分析。功率谱密度分析是系统对随机动力载荷响应的概率统计,原始数学模型以概率理论为基础,进行定性分析。1σ 响应值表征概率统计中正态分布下的均方根响应值,小于该值的出现概率为68.27%,2σ响应值表征小于该值的出现概率为95.95%,3σ响应值表征小于该值的出现概率为99.94%[7]。为了提高系统的可靠性,本例计算采用3σ响应值。
当得到系统的固有频率和振型后,可将图2的振动环境谱作用于系统的基础进行随机振动分析。由随机振动分析对该系统进行的强度校核,得到系统的最大von-Mises应力的3σ解为155.79 MPa,假设系统应力响应服从高斯分布,则系统的von-Mises应力可认为小于或等于155.79 MPa,最大应力发生在U型架系统上。由于U型架系统为Q235A系统钢,σs=235 MPa,安全系数取1.5,所以许用应力为156.7 MPa。最大应力小于许用应力,满足GJB720-2012《军用直升机强度规范》中直升机振动情况下的强度要求[5]。垂向激励下系统3σ的应力分布云图如图7所示。

图7 垂向激励下系统3σ的应力分布云图
根据直升机的振动环境特点可知,直升机振动主要受主旋翼、尾桨等气动交变载荷作用,一般来说,外界激励主要对系统的前3阶频率影响较大,因此仅对与系统前3阶频率相近的激励进行分析。在上述直升机的振动谱激励下,水平基线729 mm,垂直基线83.9 mm任意两挂点的相对位移小于0.079 mm,具体如图8所示,其为基线支架上4个天线挂点处在垂向上位移响应曲线(垂向激励)。由图中可以看到,横向对比任意两挂点最大相对位移约为0.079 mm,满足工程项目要求。
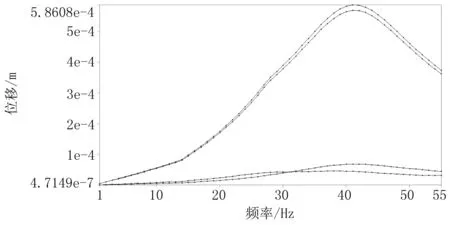
图8 基线上天线挂点处在载荷激励谱作用下垂向的位移随频率的响应曲线
4 结束语
本文用ANSYS有限元分析软件对设备平台进行了模态分析和随机振动分析,理论仿真上论证了设备平台设计的可行性,为设备在直升机平台上工作的稳定性和可靠性提供设计依据。对类似直升机搭载平台项目的论证及可行性提供了很好的支撑作用,具有实际工程意义。
