基于小型车辆自然行驶状态的山区道路风险路段研究
2020-05-14陈而越陈金山郭建钢
陈而越,陈金山,郭建钢,李 林,林 慧
(福建农林大学交通与土木工程学院,福建 福州350002)
交通安全关乎每个出行者的切身利益。 据近年相关统计资料显示,我国在弯道路段发生的交通事故率要远高于直线路段,弯道路段的事故形态以碰撞、刮擦为主,且事故严重程度较高[1-4]。 发生事故的主要原因是车辆的行驶状态受到客观道路条件的限制,且车辆过弯时由于驾驶员主观决策影响未能预判前方曲线路段、行驶速度高于曲线路段限速值及出于安全舒适角度考虑靠弯道内侧切弯行驶,导致车辆越过道路中线驶入对向车道与对向车辆发生轨迹交叉,出现两车冲突区域,即确定为风险路段,增加事故发生的可能性与严重性[5-8]。
风险路段是指在某一较长时间段内某一特定道路上发生交通事故次数高于其它路段的路段。 国内外针对风险路段的识别方法开展了大量研究,其中传统的识别方法已较为成熟,包括事故频率法、事故率法、矩阵法及当量事故法等[9-11]。 孟祥海等应用统计分布拟合及假设检验来识别风险路段的突出事故影响因素[12];周志俊等采用矩阵模型并结合运行速度协调性确定风险路段[13]。 传统的方法需要建立在稳定的事故数据基础上进行判别,但在交通事故数据不足的情况下,提出的风险理论模型与实际情况吻合度不高,这些基于历史交通事故数据的建模方法不能起到预防的目的。 Karaduman 等提出一种可预告弯道潜在风险的弯道风险评估模型,但模型仅适用于城市平坦路段,适用范围较为局限[14];徐进等分析车辆轨迹的形态特征得到易发事故的路段,但对车辆轨迹的捕捉要求过高导致识别的误差较大[15];孙川等提出弯道行驶安全性评价指标用以评价弯道行驶的安全性,但评价指标的选取仍存在争议[16]。上述研究中,对车辆的选择均以试验车为主,且理想化了许多道路参数,不能很好的反映真实道路车辆的运行情况。 因此,从车辆自身出发,研究车辆自然行驶状态下的行驶轨迹和过弯速度的变化情况,提出一种基于车辆自然行驶状态的山区道路风险路段的识别方法是有必要。
1 试验设计
1.1 研究对象
选取福州市森林公园经宦溪至鼓岭景区路段(K12+980~K17+940)的4 个弯道作为研究对象,各弯道的几何参数,见表1。 根据施工图设计文件及现场测量验证,该路段为山区四级公路,设计速度20 km/h,双向两车道,交通流较小,以处于自由流状态下的小型车为主,具备典型的山区低等级公路的特点。

表1 研究弯道的几何参数表Tab.1 The geometric parameters of the curve
选取的4 个弯道均为暗弯,临水临崖侧均设有防撞等级为A 级的钢筋砼防撞护栏,且与相邻的弯道有较长的直线段,减少车辆在入弯时状态受相邻弯道的影响。
1.2 数据获取
1.2.1 车辆行驶轨迹获取
本试验利用无人机的低畸变广角相机,将无人机高空悬停拍摄小型车辆从入弯到出弯的整个自然行驶过程的视频。 为了提高视频数据的精度,在拍摄范围内放置一个90 cm×65 cm 的矩形校正板,用于调整在后期数据获取时产生的误差。
将视频导入Ae 视频处理软件,规定将行驶在弯道内侧车辆的行驶方向为右转行驶,行驶在弯道外侧车辆的行驶方向为左转行驶,以右转行驶车辆的入弯点为坐标原点,沿道路中线均匀延长至出弯点,以此作为横轴。 以小型车辆左前轮与路面的接触点为数据读取点,接触点与道路中线的垂直距离为行驶轨迹值,接触点在弯道外侧时数值为正,内侧时数值为负,以此作为纵轴。 现场拍摄画面及道路中线坐标轴与行驶轨迹坐标轴组成弯道平面坐标系,见图1。

图1 现场拍摄画面及弯道平面坐标系图Fig.1 Scene shot picture and curve plane coordinate system
使用Ae 软件中追踪运动模块追踪小型车辆左前轮的轨迹,根据行驶轨迹图和坐标系化的弯道,每0.4 s读取一个行驶轨迹值,确定与之对应的坐标。 由统计学最小样本量要求,并结合现场条件,最小样本量定为70 辆小型车。
1.2.2 车辆行驶速度获取根据各行驶轨迹值的读取点坐标(x,y),对速度值进行求解

式中:v 为速度值;(x,y)为行驶轨迹坐标值;(xt-0.4,yt-0.4)为上一读取点的行驶轨迹坐标值。
为了确保无人机视频获取数据的准确性和可靠性, 利用便携式路侧激光交通调查仪获取交通流数据,与无人机视频获取的数据进行对比后得到最终的行驶速度值。
2 风险路段的识别方法
车辆的行驶轨迹决策是驾驶人的一种选择行为,典型的驾驶模式有4 种:车辆行驶轨迹最短模式,行驶时间最短模式,轨迹曲率变化率最小模式,行车道居中行驶模式。 车辆行驶轨迹是驾驶人受约束于行驶轨迹控制影响因素,且在多个目标之间对四种典型的决策模式进行权衡和折中后形成的车辆真实行驶轨迹。 因此,实际调查中发现,车辆无法沿道路在既定的车道内行驶,车辆的行驶轨迹半径与弯道半径之间存在较大的差异性,导致车辆越过道路中心线驶入对向车道,存在安全隐患,因此可将车辆行驶轨迹作为识别风险路段的依据之一。
车辆行驶速度是基于车辆行驶时刻和行驶瞬时位置的速度概念,也是车辆在道路上的真实行驶数据,并且能够反映道路和驾驶人对车辆的综合影响结果;因此可将车辆行驶速度作为风险路段的识别依据之一。
2.1 基于行驶轨迹的识别方法
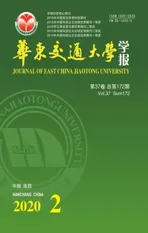
根据追踪读取左前轮点的数据,得到小型车辆在各断面位置的行驶轨迹值。 限于篇幅,本文仅展示弯道1 部分车辆的行驶轨迹值。 其中,小型车辆在弯道1 右转行驶的轨迹值,见表2;小型车辆在弯道1 左转行驶的轨迹值,见表3。
从表2、 表3 可知, 同一弯道的右转行驶车辆和左转行驶车辆的行驶轨迹值呈现出总体上的变化一致性,但局部断面存在较大差异,即车辆在入弯处、弯道中部及出弯处越过道路中线的差别,这是由于不同驾驶员的操作习惯和过弯速度存在差异所造成的。 同一弯道同一行驶方向车辆行驶轨迹的离散分布导致右转车辆和左转车辆越过道路中心线,从而使右转车辆和左转车辆行驶轨迹发生高频交叉,交叉区域即整个弯道交通事故易发的风险区域。 这反映出行驶车辆对前方弯道预判不足、出于安全考虑或选择最小路径过弯,导致车辆驶入对向车道,与对向车辆的行驶轨迹发生交叉。
采用GetData 软件计算出车辆在各读取点的所有车辆行驶轨迹的平均值, 绘制出右转行驶和左转行驶轨迹总体趋势,见图2。
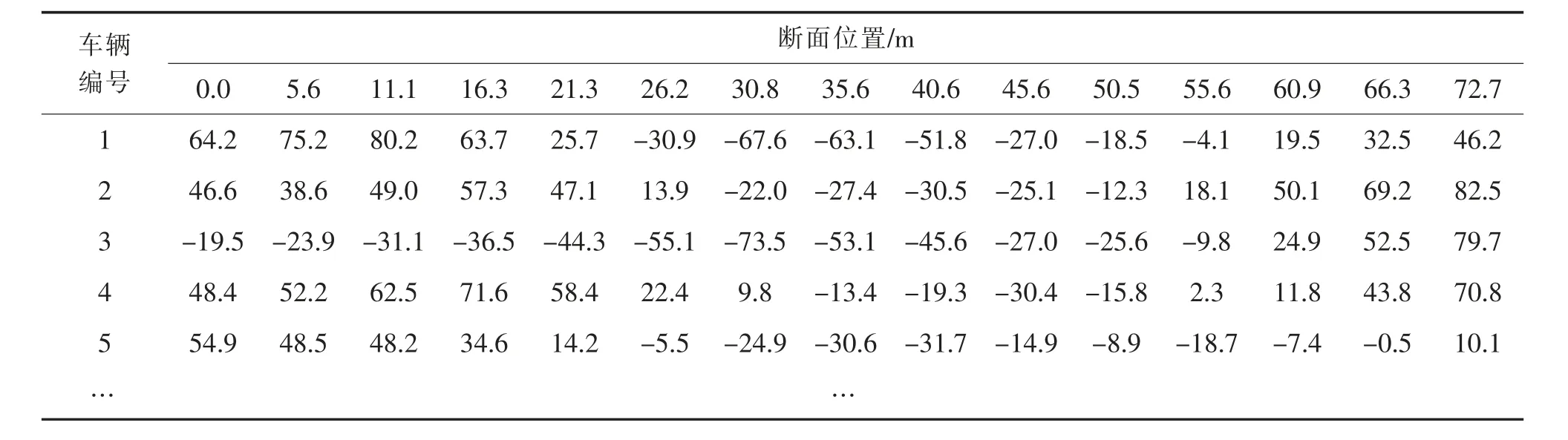
表2 弯道1 右转车辆的行驶轨迹值Tab.2 Travel track value of right turning vehicle in Curve 1
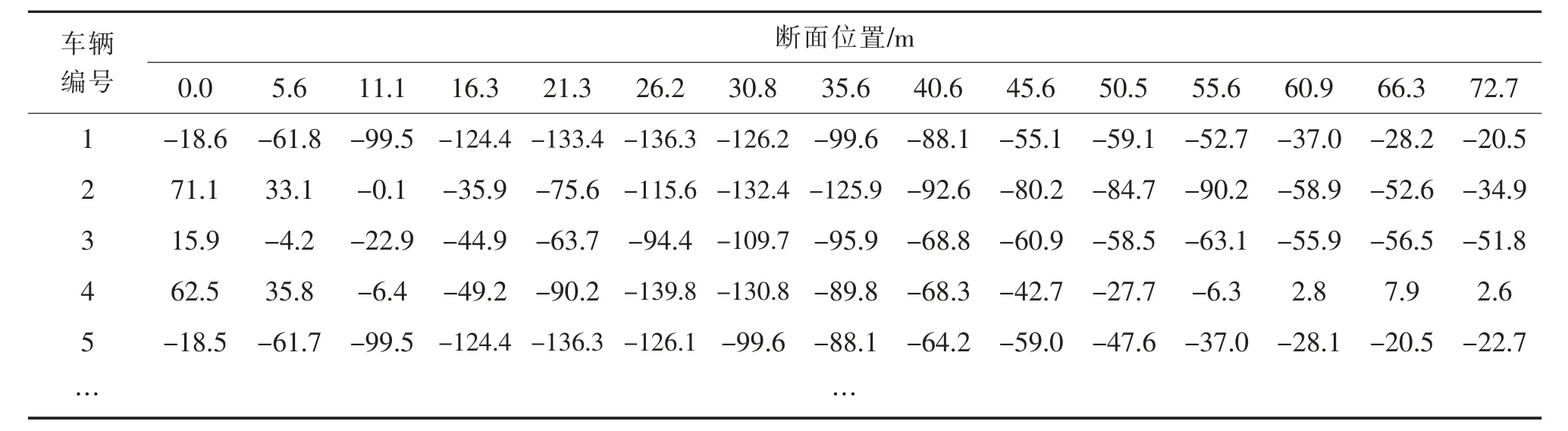
表3 弯道1 左转车辆的行驶轨迹值Tab.3 Travel track value of left turning vehicle in Curve 1
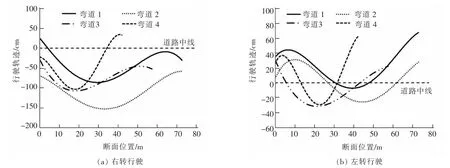
图2 车辆行驶轨迹总体趋势图Fig.2 Overall trend of vehicle trajectory
从图2 可知,右转行驶车辆的总体行驶轨迹曲线变化过程为入弯时缓慢递减后单调递减,行驶至最低点后单调递增,最后缓慢递减或单调递减出弯。 左转行驶车辆的总体行驶轨迹曲线变化过程为入弯时缓慢递减至最低点后单调递增,最后缓慢递减或单调递减出弯。同时,车辆在通过弯道时的行驶轨迹总体上均呈现出切弯行驶的趋势,其中,左转车辆在切弯行驶过程中均越过道路中心线驶入对向车道,增加了与对向车辆发生轨迹交叉的频率,严重情况下占用对向车道正常通行,导致两车发生冲突的概率增大。
根据车辆通过弯道时, 行驶轨迹越过道路中心线占用对向车道或与对向车辆发生轨迹交叉的情况,将易发生交通冲突的风险路段作以下划分:将车辆的行驶轨迹越过道路中线占用对向车道的路段定义为潜在事故路段,将右转行驶和左转行驶车辆行驶轨迹的交汇路段定义为危险事故路段。 计算得到各弯道潜在事故路段长度和危险事故路段长度,见表4。

表4 风险路段长度值表Tab.4 Risk section length values
从表4 可知, 车辆的行驶轨迹越过道路中心线的路段占整个弯道路段的比例较高,4 个弯道中最高为66.3%,最低为37.5%。 当左转行驶车辆偏离外侧车道驶入内侧车道时,一方面给对向车辆带来巨大压力,另一方面遇到突发情况想要回到外侧车道需要更大的操作空间,都将引起交同冲突甚至交通事故。 右转行驶和左转行驶车辆行驶轨迹的交汇路段仅在弯道1 出现,但事故严重程度高。
2.2 基于行驶速度的识别方法
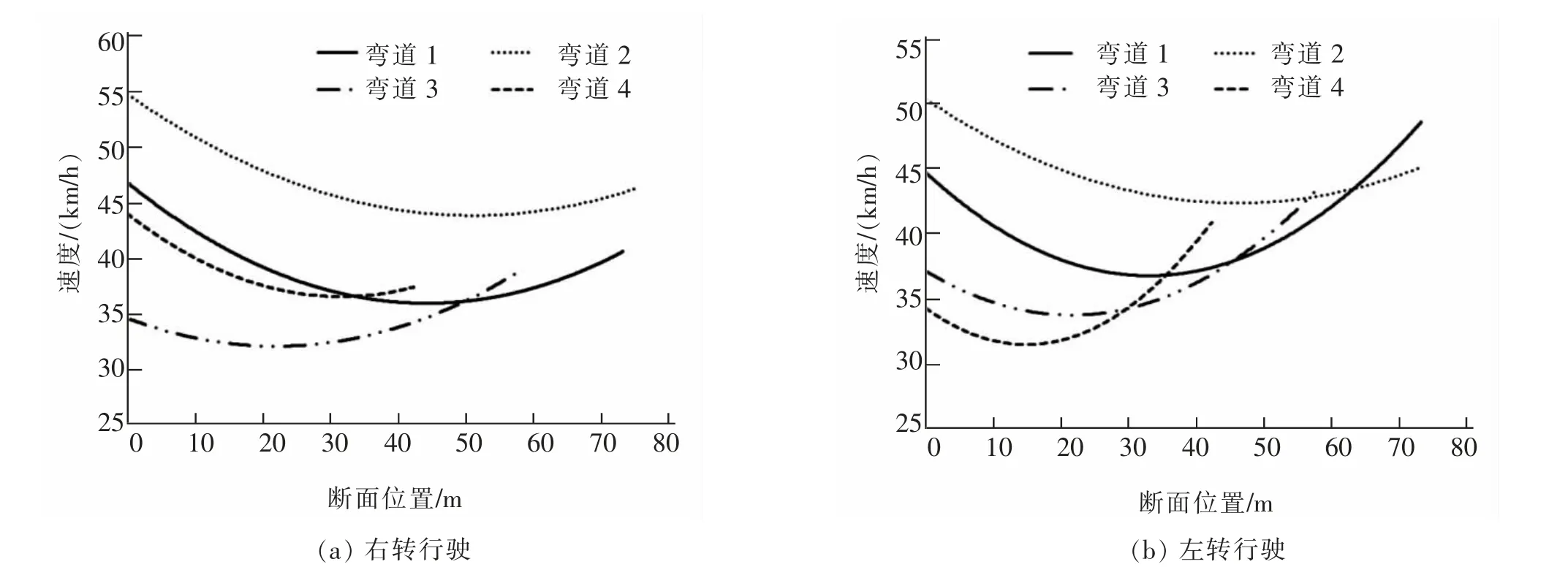
图3 车辆过弯速度变化总体趋势图Fig.3 Overall trend of vehicle turning speed change
根据校正后各读取点的瞬时速度,计算得到各读取断面的速度均值,绘制右转行驶车辆和左转行驶车辆通过弯道时的速度变化总体趋势,见图3。从图3 可知,实际调查中,车辆通过弯道时的行驶速度远高于设计速度,已存在安全隐患,且车辆过弯速度变化呈现先减小到最低值后增大的趋势,与行驶轨迹变化先减小到最低点后增大的总体切弯趋势具有相似性。 从两类曲线数值最低点出现的断面位置看,速度变化趋势曲线的最低点总体上位于行驶轨迹总体趋势曲线的最低点之后,反映出右转行驶车辆在弯道内侧行驶过程中,由于视距不足等对弯道线形判断错误;左转行驶车辆在弯道外侧行驶过程中,由于安全等因素考虑驶入对向车道后减速回到外侧车道出弯的特点。 因此,同一弯道同一行驶方向的速度变化趋势曲线最低点所对应的断面位置数值与行驶轨迹总体趋势曲线最低点所对应的断面位置数值的差值的绝对值,即两断面之间的相对距离长度可判定为事故多发的风险路段。 具体数值,见表5。
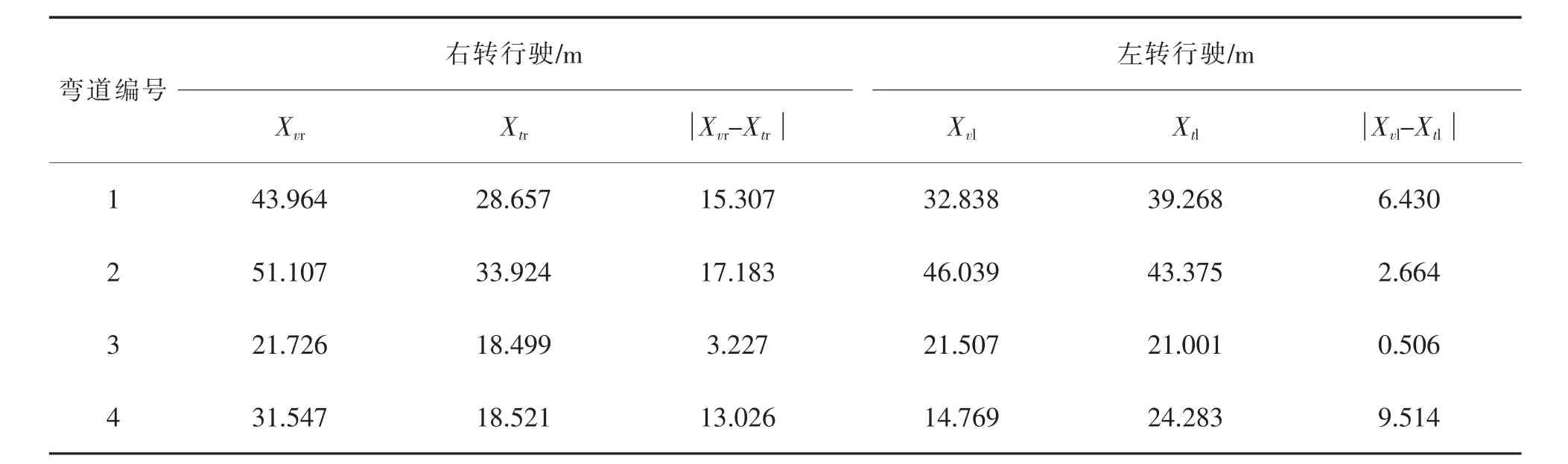
表5 速度与轨迹最低点所对应的断面的相对距离长度值表Tab.5 Relative distance length values of the section corresponding to the lowest point of velocity and trajectory
3 风险路段的分布情况
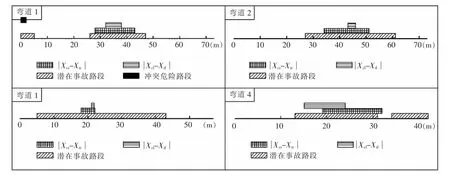
图4 各影响因素分布情况图Fig.4 Distribution of various influencing factors
图5 各弯道的风险路段分布情况图Fig.5 Distribution of accident sections of each corner
考虑事故等级严重程度, 将一般风险路段和严重风险路段所包含的路段确定为事故多发的风险路段。因此,弯道1 风险路段为0~2.273,32.838~39.268 m,弯道2 风险路段为43.375~46.039 m,弯道3 风险路段为21.001~21.507 m,弯道4 风险路段为18.521~24.283 m。
4 结论
通过研究4 个弯道的行驶轨迹、行驶速度及风险路段的分布情况,得到以下主要结论:
1) 车辆的行驶轨迹越过道路中线占用对向车道,并与对向车辆发生高频轨迹交叉,得到潜在事故路段和危险事故路段。
3) 确定事故等级为:安全行驶路段、潜在风险路段、一般风险路段、严重风险路段,并得到各弯道事故多发的风险路段的分布情况。
本文克服了以往试验车为主的试验方法,以自然行驶状态下的车辆驶过整个弯道为研究重点,选取行驶轨迹及行驶速度作为识别依据,为山区道路事故多发的风险路段的识别提供一种新的识别方法。 但限于调查仪器及本人试验水平,本次试验仅选取4 个单向弯道且以小型车为主要研究对象,后续可丰富研究对象,例如以反向连续弯道为试验场地,考虑大、小型车的行驶轨迹及行驶速度,同时针对风险路段的预防给出较为妥善的解决办法。