基于前馈补偿的谐波电流抑制方法
2020-05-14刘德华高一宁
关 新,阮 鹏,刘德华,高一宁
(沈阳工业大学,沈阳 110870)
0 引 言
随着电机相数的增多,多相电机具有了许多三相电机所不具备的优势与发展前景。例如双三相永磁同步电机在一些工业场合拥有比三相永磁同步电机更佳的运行性能,比如新能源汽车、船舶推进电机等领域[1-2]。双三相电机所具备的优势[3-7]:
(1)双三相电机具有比三相电机更优良的容错性能。
(2)其转矩次数比三相电机更小。
(3)由于双三相电机的电压等级低于三相电机,所以双三相电机可以选择小功率的开关器件。
Zhao Y 和Lipo采用将双三相电机的六维变量通过矢量空间解耦转化到三个相互正交的子平面上[8]。实现完全解耦的电机,由于气隙磁场畸变以及逆变器非线性,且谐波子空间含有的定子电阻和自漏感过小,所以很小的电压畸变都会产生较大的畸变电压,从而导致过大的畸变电流产生电流谐波[9]。
针对以上问题,本文在准比例谐波控制的基础上采用电压前馈的方式,在谐波子平面,采用空间坐标变换,将5、7次谐波电流转化为6次交流量,用准PR控制器进行抑制;同时采用新的坐标变换将交流量转化为直流量,后经低通滤波器进行提取,根据计算出的前馈补偿电压方程得出前馈值,进行前馈补偿并通过仿真验证该方法的有效性。
1 双三相永磁同步电机数学模型
双三相PMSM的结构图如图1所示,该电机由A1、B1、C1和A2、B2、C2两套三相绕组构成,每套定子绕组互差30°电角度且在空间上对称分布,单独一套绕组的各相在空间上互差120°电角度且都成Y型连接,两套绕组的中性点相互隔离。
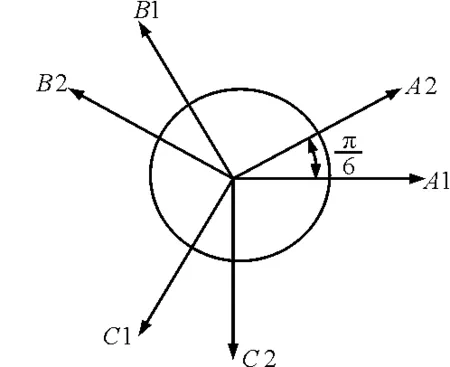
图1 双三相PMSM电机绕组结构
在双三相PMSM在静止坐标系下,运用空间矢量解耦变换理论,将双三相PMSM的六维变量映射到3个相互正交的二维子空间上,建立其谐波基下的电机数学模型公式(1):
(1)
结合文献[10],经过上述静止坐标变换,v= 6k± 1(k= 1,3,5…)次谐波被映射z1-z2子平面,对应式1的中间两行。为了方便分析,将静止坐标系转换到同步旋转坐标系下,变换矩阵为公式(2):
(2)
经过同步旋转坐标变换可得,双三相PMSMd-q子平面上的电压与磁链方为
(3)
(4)
由于式(3)、式(4)所代表的谐波子平面上的电阻和电感较小,将会产生较大的谐波电流,谐波子平面并不参与电机的机电能量转换,只会产生谐波,只与电机损耗有关。
z1-z2子平面的电压方程为:
(5)
电磁转矩方程为:
Te=3pn[ψfiq+(Ld-Lq)idiq]
(6)
式中,uk,ik(k=d,q,z1,z2,o1,o2)为各平面所对应的电压和电流;ψd,ψd为d,q子平面的交直轴磁链;Ld,Lq为d,q子平面的交直轴电感;Lz为谐波子平面的漏电感;Te为电磁转矩;w为同步角速度;Pn为极对数。
2 双三相永磁同步电机谐波电流分析
双三相PMSM的相电流谐波包括两部分。(1)空间谐波:主要是由于在电机本体设计时,存在设计上的一些问题,这些问题将导致电机内部的气隙磁场发生畸变;(2)时间谐波:由于存在二极管和三极管的管压降以及逆变器死区,所以实际的电力电子器件是非理想开关,这些都将导致时间谐波[11]。
本文使用的双三相永磁同步电机使用中性点互不连接的方式运行。令I1为基波幅值、I5为5次谐波幅值和I7为7次谐波的幅值,则电机相电流为
(7)
3 谐波电流抑制策略
双三相永磁同步电机在谐波子平面如果采用PI控制,将无法做到对周期信号进行无静差的跟踪,不能很好的抑制谐波子平面上的谐波电流。因此本文采用坐标变换,准比例谐振控制器对6次交流量进行控制的基础上,采用电压前馈补偿的方法,对由逆变器死区所导致的一系列谐波进行抑制,其中最主要的是5次和7次谐波。实现对谐波子平面的抑制,降低电机损耗的目的。本文所采用的双三相永磁同步电机控制框图如图2所示。
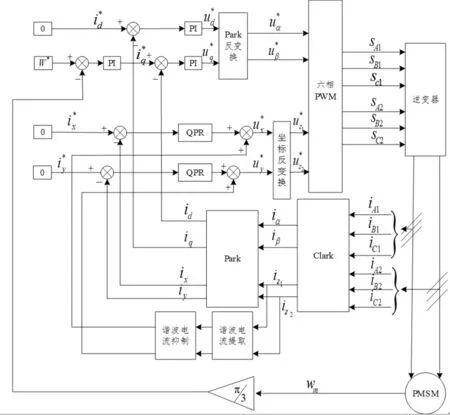
图2 双三相永磁同步电机控制原理图
原来对5次和7次谐波进行抑制时,需要采用两个准比例谐振控制器进行并联,增加了控制的复杂度。为了简化控制方法,现按图2中的方法把静止坐标系上的5次和7次交流量转换到x-y子平面上的6次交流量。现将式(2)进行坐标变换,把5次和7次谐波变换为6次交流分量,采用一个谐振频率为6次的准比例谐振控制器即可对5次和7次谐波进行抑制,简化了控制模型。式(2)改写为
(8)
在Simulink里对谐振频率为6次的准比例控制器进行搭建,如图3所示。

图3 6次准比例谐振控制器
3.1 谐波电流提取
电压前馈补偿策略需要将静止坐标系上的5次、7次交流量转化到旋转坐标系上的直流量。根据文献[19]可知,具有相同速度和旋转方向的频率分量,在该坐标系下可转换为直流分量。因此为了提取5次谐波直流分量,可以将5次谐波转化到5次旋转坐标系上使其变为直流量,其他的如基波和7次谐波等将是交流量,将式(8)改写如下:
(9)
同理7次谐波转化到7次旋转坐标系上如下式:
(10)

图4 谐波电流提取
根据式式(9)、式(10)在Simulink里搭建模型,并采用5 Hz的2阶Butterworth低通滤波器对得到的直流量进行提取,如图5所示。
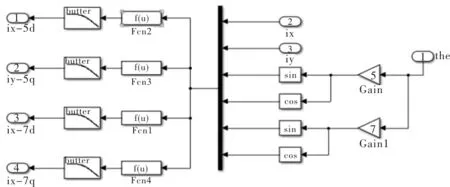
图5 直流量提取
3.2 前馈补偿电压计算
采用同步旋转坐标变换,将式(5)变换到x-y旋转坐标系上:
(11)
通过低通滤波器得到的各次谐波均为直流量,将各次谐波取负号代入(11)式中,得到各次前馈补偿电压:
(12)
(13)

3.3 谐波电流抑制方法
将在5次、7次旋转坐标系上得到的直流补偿电压经坐标变换转化到基波旋转坐标子平面上,使其变为基波子平面上的交流量,并进行叠加。5次、7次直流补偿电压旋转到基波子平面上的坐标反变换公式分别为:
(14)
(15)
将前馈补偿分量由5次和7次直流量转化为旋转坐标系上的交流量后进行叠加,在Simulink中进行建模,如图6所示。

图6 前馈补偿电压叠加
将叠加得到的前馈补偿电压加入到以准比例谐振控制器为双闭环控制的电流环中,如图7所示。
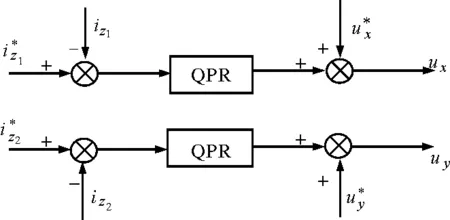
图7 谐波抑制框图
由于前馈控制是在旋转坐标系上进行的,因此,需要用坐标变换,将同步旋转坐标系上的电压转化为静止坐标系上的电压,坐标反变换公式为:
(16)
4 仿真分析
本文在Simulink软件里,搭建双三相PMSM仿真模型进行仿真实验分析。双三相PMSM参数具体如下:定子电阻为1.5 Ω,交直轴电感为0.7 mH,定子漏感为1.2 mH,转动惯量为0.07 kg·m2,极对数为5。双三相永磁同步电机当采用较高的开关频率时,理想状态下可以很好的抑制谐波电流,但由于谐波子平面只含有较小的电阻和漏抗,即使电路中发生很小的电压畸变,都将导致较大的谐波电流。由于逆变器死区,在谐波子平面上产生大量谐波电流。本实验逆变器死区为5 s。图8为只加入了死区,不采用谐波抑制方法。以A1、B1、C1三相来分析,其他三相相似。当电机稳定运行时,可以观察到A1相电流在加入死区时间后,电流波形图发生畸变。从图(c)中可以看到,总的谐波含量为3.18%,5次和7次谐波分别为1.86%和1.40%。


图8 加入逆变器死区仿真图
图9为在谐波子平面采用准比例控制时仿真图。从图中可以看出采用准PR控制后,三相电流的仿真波形图比未采用时要光滑一些,谐波含量也下降。谐波总含量为2.39%,下降了25%。5次和7次谐波分别为0.71%和0.67%,分别下降了62%和52%。从以上数据可以看出5次和7次谐波下降较大。


图9 采用准比例控制仿真图
图10为采用前馈控制的仿真图。可以看到电流波形相比于准比例控制要光滑许多。谐波总含量下降为0.76%。5次和7次谐波含量分别为0.02%和0.07%。可以看出前馈控制对由逆变器死区所造成的谐波电流抑制能力比准比例控制要好的多。
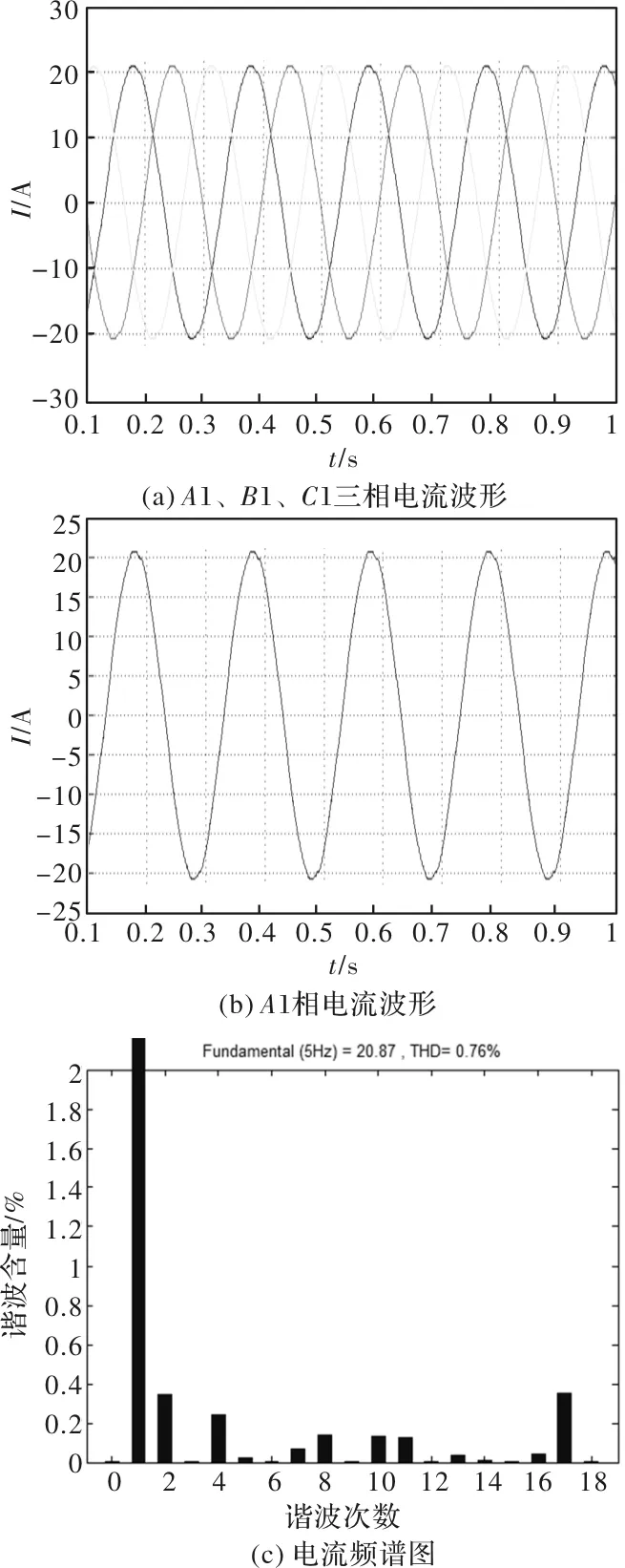
图10 采用前馈控制仿真图
双三相永磁同步电机采用各种控制方法下,x-y轴上的电流波形图如图11所示。从中可以看出,采用准比例谐振控制对谐波子平面上的谐波电流有一部分进行了抑制,但是抑制效果不太明显,从图(c)中可以看出,采用前馈的方法,将谐波子平面上的谐波电流进行了很好的抑制,谐波电流幅值从原来的1.5抑制到了1。

图11 x-y轴上的电流波形图
表1为以上三种仿真实验数据汇总表,可以看出,采用前馈控制对谐波电流的抑制能力很强。

表1 谐波含量对比分析表
5 结 语
双三相永磁同步电机将不同次数的电流解耦到3个相互正交的子平面上,但同时也引入了谐波子空间,使电机在实际控制时由于电压波动导致较大的谐波电流,增加了电机的损耗。本文在空间矢量解耦控制的基础上,结合准比例控制的一些不足,提出了电压前馈控制的方法。从仿真实验可以看出,采用前馈控制对谐波电流的抑制程度好于单独的准比例控制。将有效的抑制谐波,提高电机运行性能,降低电机损耗。