超大型和大型半潜浮式海上风力机动力响应对比
2020-05-10赵志新王文华
赵志新,李 昕,王文华,施 伟, 3
(1. 大连理工大学 水利工程学院,辽宁 大连 116024;2. 大连理工大学 海岸与近海工程国家重点实验室,辽宁 大连 116024;3. 大连理工大学 深海工程研究中心,辽宁 大连 116024)
风能作为一种可再生的清洁能源,在国家能源战略中占有重要地位,而海上风能具有储量大、分布广、切变小和不占用土地等优势,使得浮式海上风力机成为开发利用风能的必然选择,并且“由陆向海、由浅向深、由固定式基础向浮式平台”是未来风能产业发展的必然趋势[1]。
浮式海上风力机是复杂的风力机-塔架-浮式平台-系泊系统强非线性相互作用(气动-弹性-水动力学相互耦合)的刚柔混合多体系统[2],其动力响应特性分析异常复杂。Jonkman等[3]开发了嵌入FAST的水动力学计算模块HydroDyn,建立了浮式海上风力机气动-水动-伺服-弹性全耦合计算模型,对5 MW驳船式浮式风力机在不同风浪荷载下的动力响应特性进行了分析。Jonkman和Matha[4]基于时域耦合分析程序FAST,进一步对5 MW MIT-TLP、OC3-Hywind Spar和驳船式浮式风力机的动力响应特性进行了对比分析,研究发现:驳船式浮式风力机结构在塔架处受力较大,而TLP和Spar式风力机结构所受荷载相差不大。Kvittem等[5]利用非线性气动-水动耦合程序Simo-Riflex-AeroDyn,分析了不同水动力计算方法对WindFloat半潜浮式风力机动力响应特性的影响规律。闫发锁等[6]将水动力耦合分析程序与现有的风力机气动力程序结合,实现了对深水浮式风力机的动力响应特性分析。
考虑到深海风能开发的成本和效益,海上浮式风力机大型化是必然趋势[7]。目前丹麦科技大学和维斯塔斯风力技术公司联合提出的DTU 10 MW风力机[8-9]成为国内外学者广泛接受的样本风力机,同时这也需要更大尺寸的浮式平台支撑DTU 10 MW风力机。Islam[10]、Xue[11]、Tian[12]基于DTU 10 MW风力机,依据经典的相似准则对OC3-Hywind Spar、MIT-TLP和WindFloat等浮式基础进行了放大设计,并运用简化耦合时域分析方法,对比分析了三种浮式风力机结构的动力响应特性。然而,海上风力机大型化后,除面临更为复杂的海洋环境荷载外,其巨型柔性叶片的气弹性效应,下部浮式平台的大幅、强非线性运动以及与系泊系统之间的强非线性耦合作用使得其动力响应特性与5 MW浮式风力机相比更具挑战。
对NREL 5 MW无撑杆的半潜浮式风力机基础结构进行放大设计,用于支撑DTU 10 MW风力机,采用气动-水动-伺服-弹性全耦合计算模型,分别对NREL 5 MW与DTU 10 MW无撑杆的半潜浮式风力机进行时域耦合分析,并据此对其动力响应特性进行对比分析,为超大型浮式海上风力机动力响应特性的分析及未来的设计与应用提供参考。
1 风力机主要参数
以DTU 10 MW风力机为研究对象,其主要参数如表1所示,同时DTU 10 MW风力机详细的翼型截面、叶素气动力系数、弦长、扭角及长度信息参见文献[13-14]。基于Froude数相似准则和放大因子k[15],参照LUAN和XU等设计的5 MW无撑杆(braceless)半潜浮式风力机平台主尺度参数[16-17],完成DTU 10 MW半潜浮式风力机平台的设计,其浮式风力机整体设计方案如图1所示,浮式平台主尺度参数如表2所示,锚链参数如表3所示,系泊系统布置如图2所示。放大因子k的计算公式如下所示:

(1)
式中:mWT,upscale为DTU 10 MW风力机质量,包括转子、机舱和塔架;mWT,initial为NREL 5 MW风力机质量。
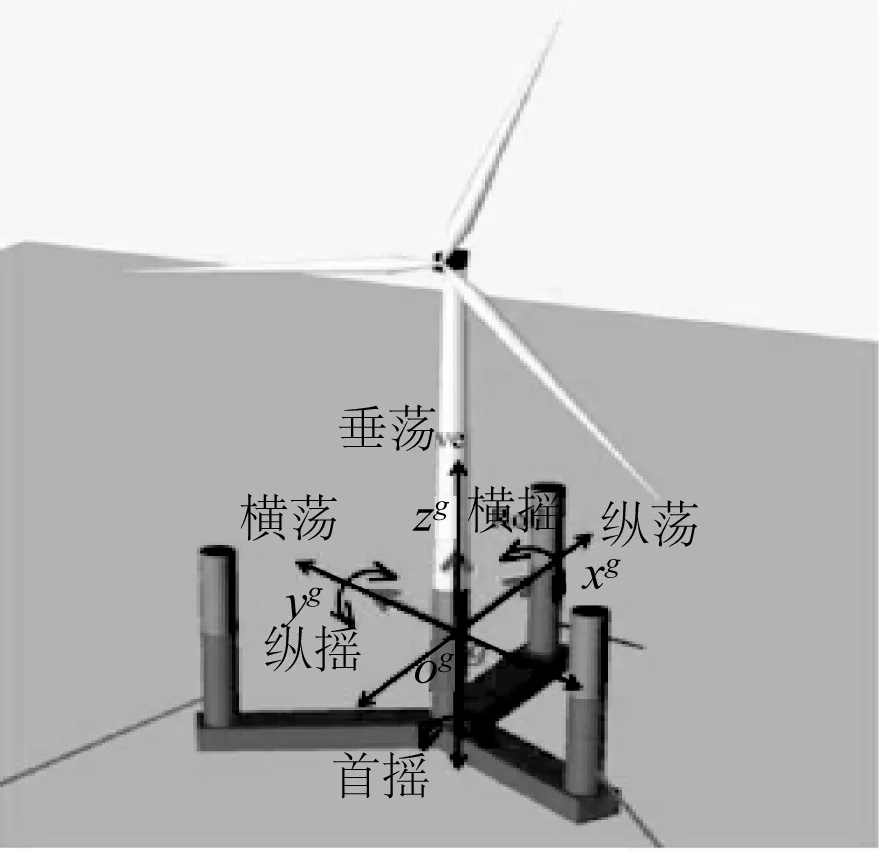
图1 半潜浮式风力机设计方案Fig. 1 Layout of floating wind turbine
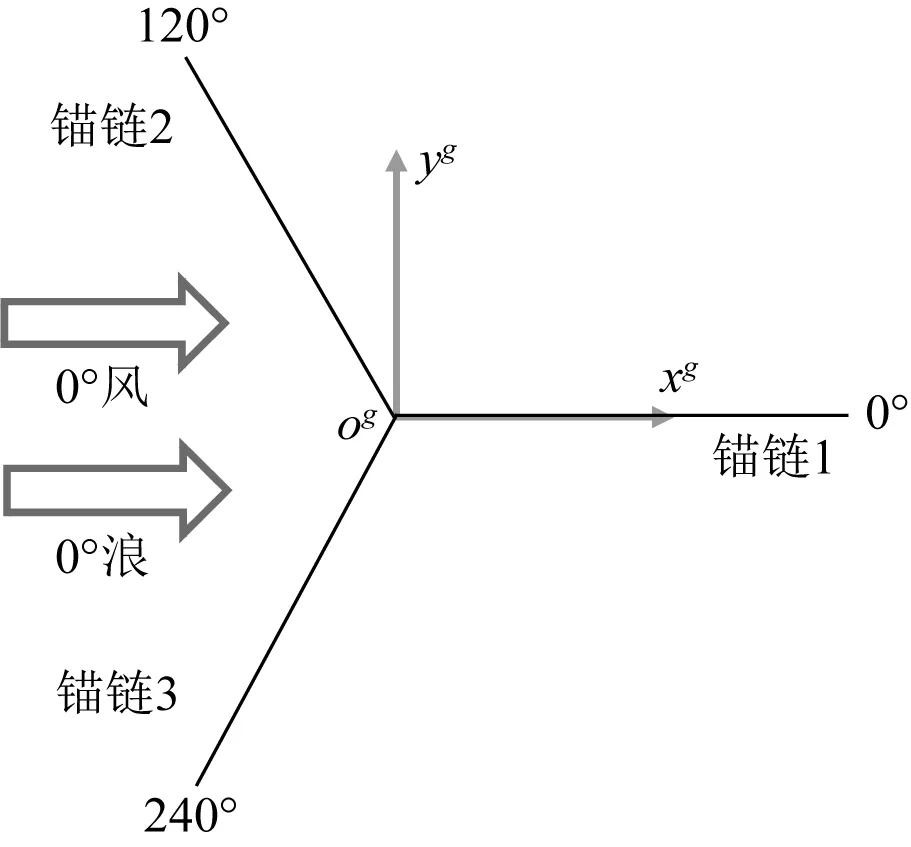
图2 系泊系统布置Fig. 2 Arrangement of mooring system
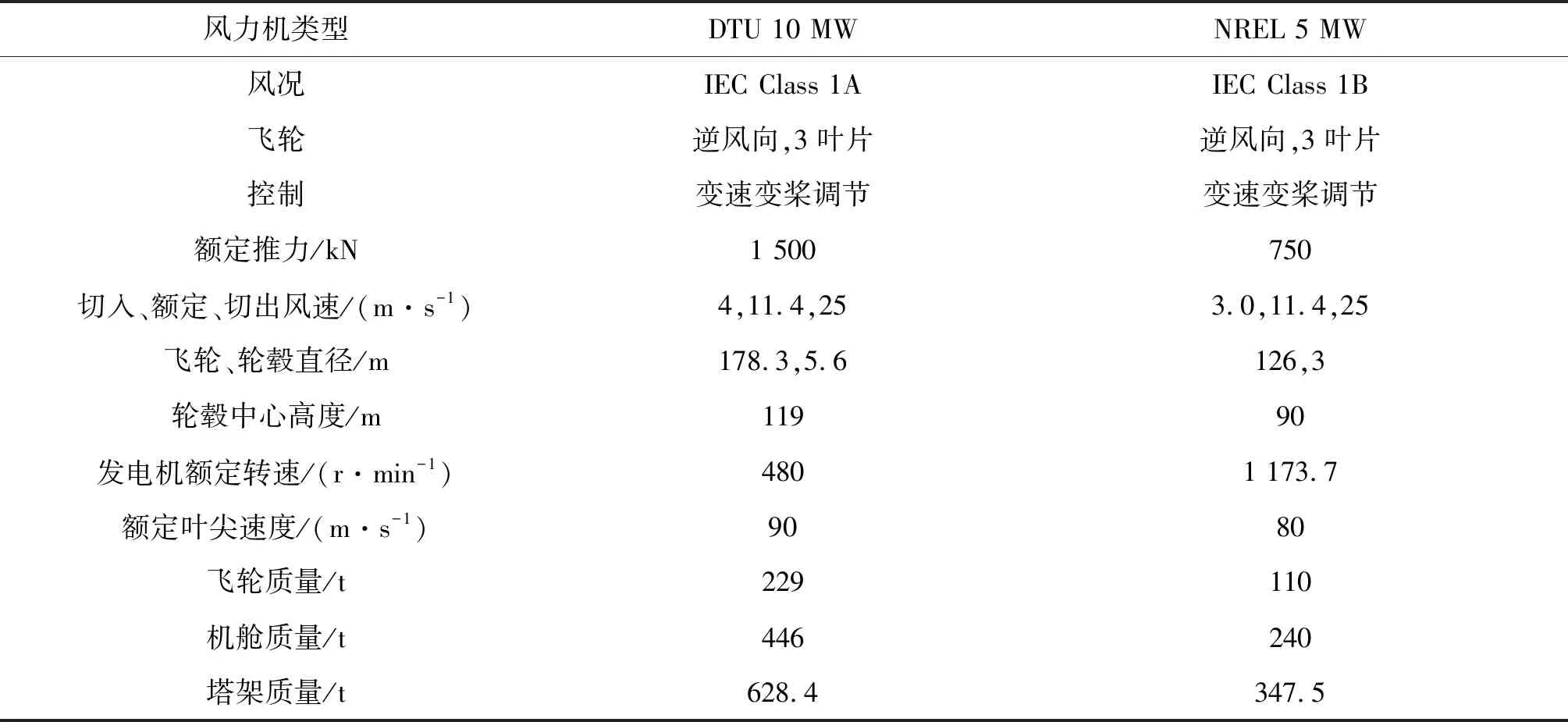
表1 风力机主要参数[13-14]Tab. 1 Parameters of wind turbine
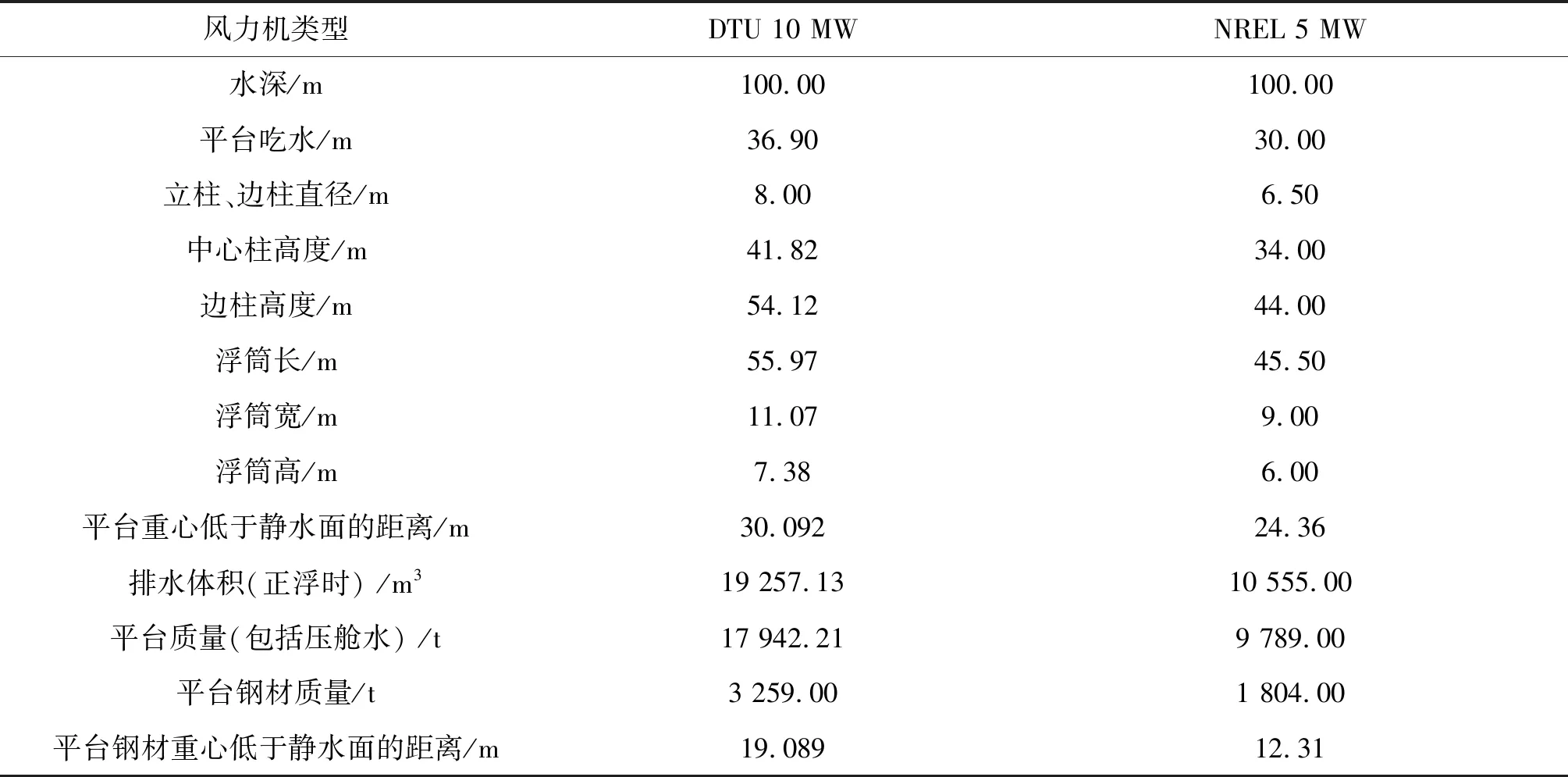
表2 半潜支撑平台主要参数[16-17]Tab. 2 Parameters of the semi-submersible platform

表3 系泊系统参数Tab. 3 Parameters of mooring system
2 浮式海上风力机系统动力响应分析理论
2.1 浮式海上风力机系统时域运动方程
基于风力机空气动力学、水动力学及多体动力学基本理论,浮式海上风力机系统时域运动方程为[18]:

(2)
式中:M为风力机系统质量矩阵;A代表当频率趋向于无穷大时,浮体的附加质量矩阵;h(t)为迟滞函数,由附加质量矩阵和势流阻尼矩阵计算得到;和x为浮体运动的加速度、速度和位移向量;Km为系泊系统回复刚度矩阵;Kh为静水回复刚度矩阵;q为外力函数,主要包括空气动力荷载和一阶水动力荷载。
2.2 水动力荷载
基于三维势流理论,使用ANSYS-AQWA软件[19]对半潜浮式平台的水动力系数和一阶波浪激励力进行计算,以生成FAST-HydroDyn模块的水动力输入文件;其中半潜浮式平台的面源模型如图3所示。频域内的一阶波浪激励力计算公式如下所示[20]:

(3)
式中:fωj为对应于j运动模态的一阶波浪力激励力;ρw为海水密度;ω0为波浪固有频率;S0为平台在静水中的湿表面面积;φI为波浪未经浮体扰动的入射波速度势;φj为对应于j运动模态的绕射波速度势。
二阶波浪激励力的作用对半潜浮式风力机较为重要,且二阶波浪激励力与频率ω和波面高度ζ相关,并可由一阶波浪激励力线性叠加得到。时域内的二阶波浪激励力计算公式如下所示[21]:

(4)

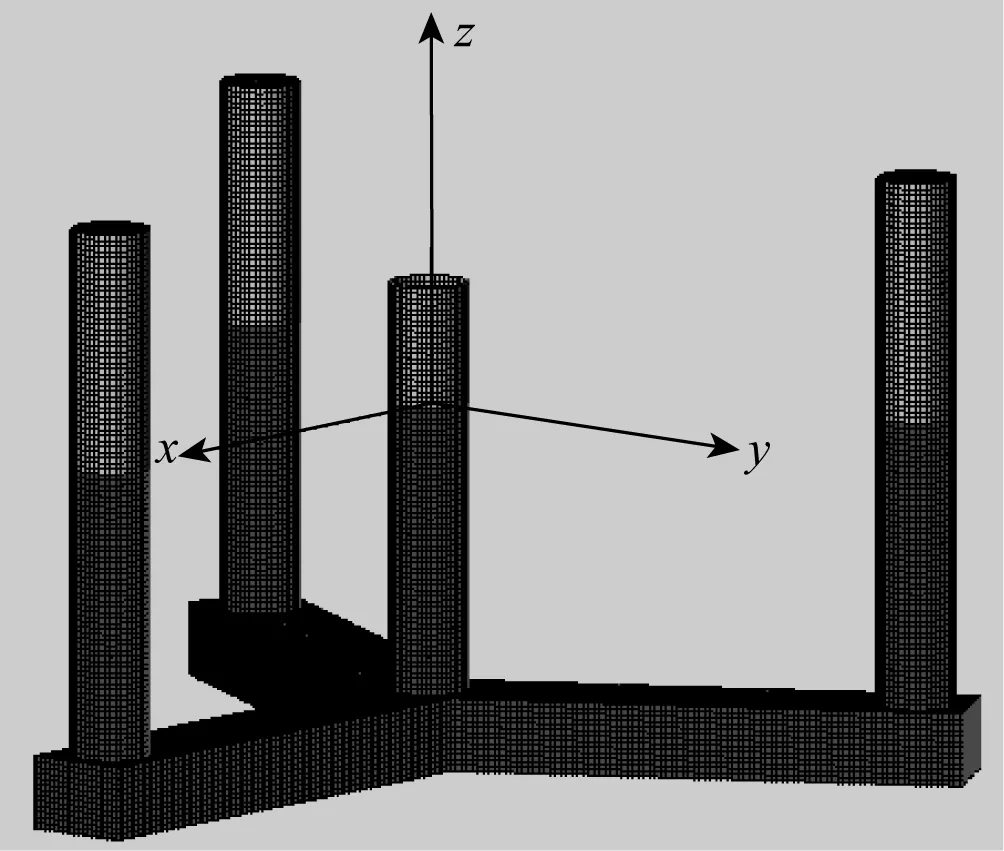
图3 浮式平台水动力计算面源模型Fig. 3 Panel mesh model of floating platform
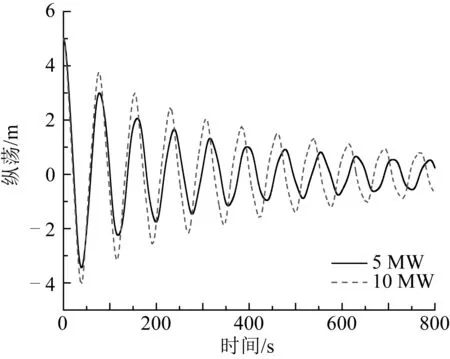
图4 风力机纵荡衰减运动时程Fig. 4 Time histories of surge decay motion
2.3 气动力荷载
基于叶素动量理论(BEM),使用FAST-AeroDyn模块计算DTU 10 MW风力机叶片旋转过程中所受的气动荷载[22],其中作用在每个叶素上的推力和力矩可由下式得出:

(5)

(6)
式中:dT和dQ分别为作用在单个叶素上的气动力和力矩;CL和CD分别为叶素翼型的升力系数和阻力系数;ρa为空气密度;c为叶素弦长;Vrel为相对入流风速;r为叶素到轮毂中心的距离。
此外,基于半经验的Beddoes-Leishman动态失速模型来考虑叶尖损失、轮毂损失和偏斜尾迹等气动效应[23]。
2.4 锚链张力
基于准静态悬链线模型,使用FAST-MAP++[24]模块计算系泊系统的非线性回复力,主要考虑锚链质量、弹性拉伸长度以及与海底的摩擦力,但忽略锚链惯性力及水动力阻尼力等动力效应。其中有卧底长度的悬链线方程如下所示[18]:

(7)

(8)
式中:HF和VF为导缆孔处锚链有效张力的水平向和竖向分力,ωM为锚链在水中单位长度重量,A为锚链的横截面面积,CB为海床与锚链之间的静摩擦系数,L为锚链未拉伸长度,EA为锚链的拉伸刚度。
3 环境条件
参照文献[18],针对浮式海上风力机主要遭受风和波浪荷载,选取典型计算工况参数如表4所示,波浪谱选取JONSWAP谱,且风浪作用同向,如图2所示。
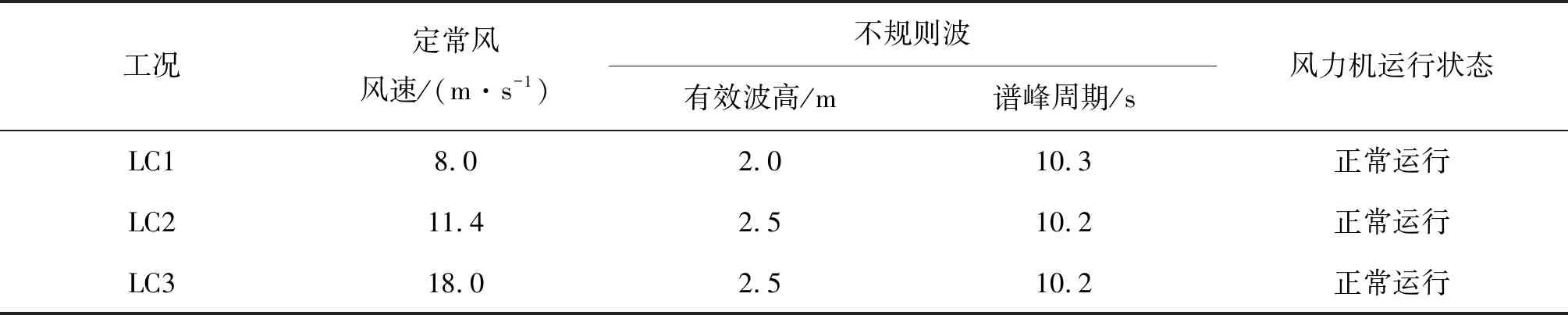
表4 环境参数Tab. 4 Parameters of environment
4 计算结果分析
4.1 风力机系统特征频率
如图1所示,对5 MW和10 MW浮式风力机平台运动六个自由度以及塔架沿xg(Fore-aft,F-A)和yg(Side-to-side,S-S)方向两个自由度的自由衰减运动分别进行数值模拟,其中5 MW和10 MW风力机纵荡衰减运动时程如图4所示,并通过傅里叶变换计算得到风力机系统主要特征频率如表5所示。对比可知:5 MW和10 MW风力机平台运动的固有频率非常接近,但风力机塔架基频和飞轮转动频率相差较大。
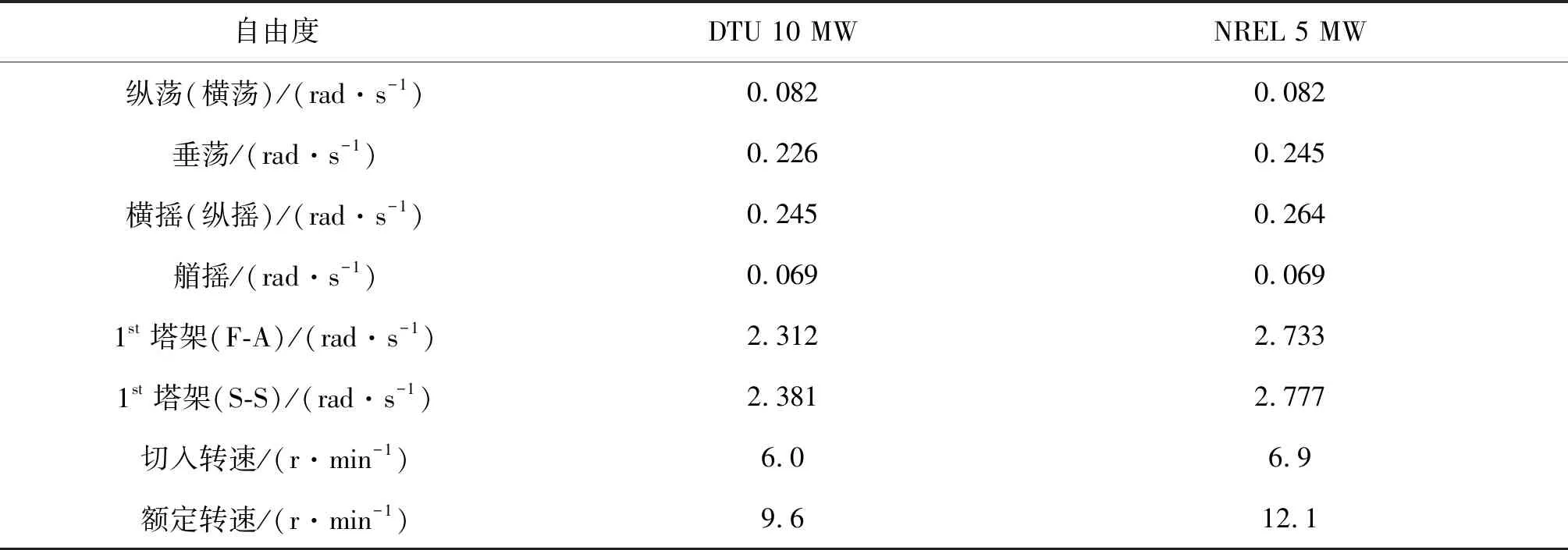
表5 风力机系统主要特征频率Tab. 5 Natural frequencies of wind turbine system
4.2 风力机平台运动响应
由表6中5 MW和10 MW风力机平台运动响应统计值可知:对比工况LC2和LC3平台运动响应标准差和均值:平台运动响应的振荡幅度由波浪荷载主导,且在额定风速以上工况(LC3),由于控制系统变桨调节作用使得气动荷载减小,这导致了平台运动响应均值的减小,故平台运动响应的均值由风荷载主导。同时,在各典型工况下,10 MW风力机平台运动响应的极值和均值较5 MW风力机增大,但5 MW风力机平台运动响应在其平衡位置振荡更为剧烈。
由图5所示5 MW和10 MW风力机在LC2工况下平台运动响应功率谱对比可知:5 MW和10 MW风力机纵荡和纵摇运动响应均主要包括风荷载激励产生的低频共振反应以及波浪荷载激励产生的波频运动,其中10 MW风力机由风荷载激励产生的低频共振反应幅值较5 MW风力机大,但5 MW风力机由波浪荷载激励产生的波频运动幅值较大。因此结合图6在LC2工况下风力机推力时程可预测:浮式风力机大型化后,相较于水动力荷载,风力机气动荷载增大的比例更大,这使得气动荷载对浮式风力机系统运动响应的作用更为突出,进而导致平台运动响应由风荷载激励产生的低频共振反应比例增大,而波浪荷载激励产生的波频运动比例减小。
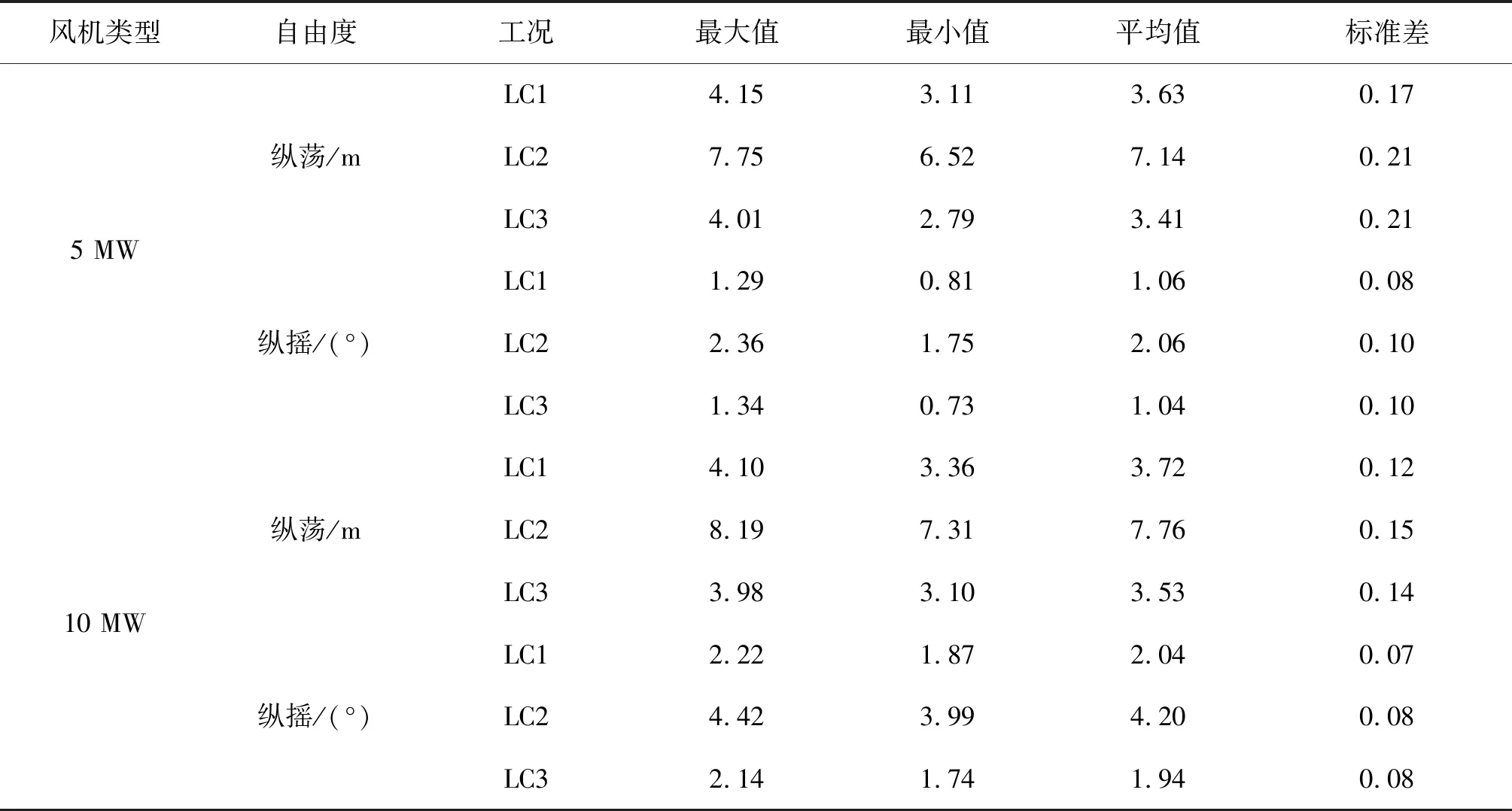
表6 平台运动响应统计Tab. 6 Statistics of platform motion responses
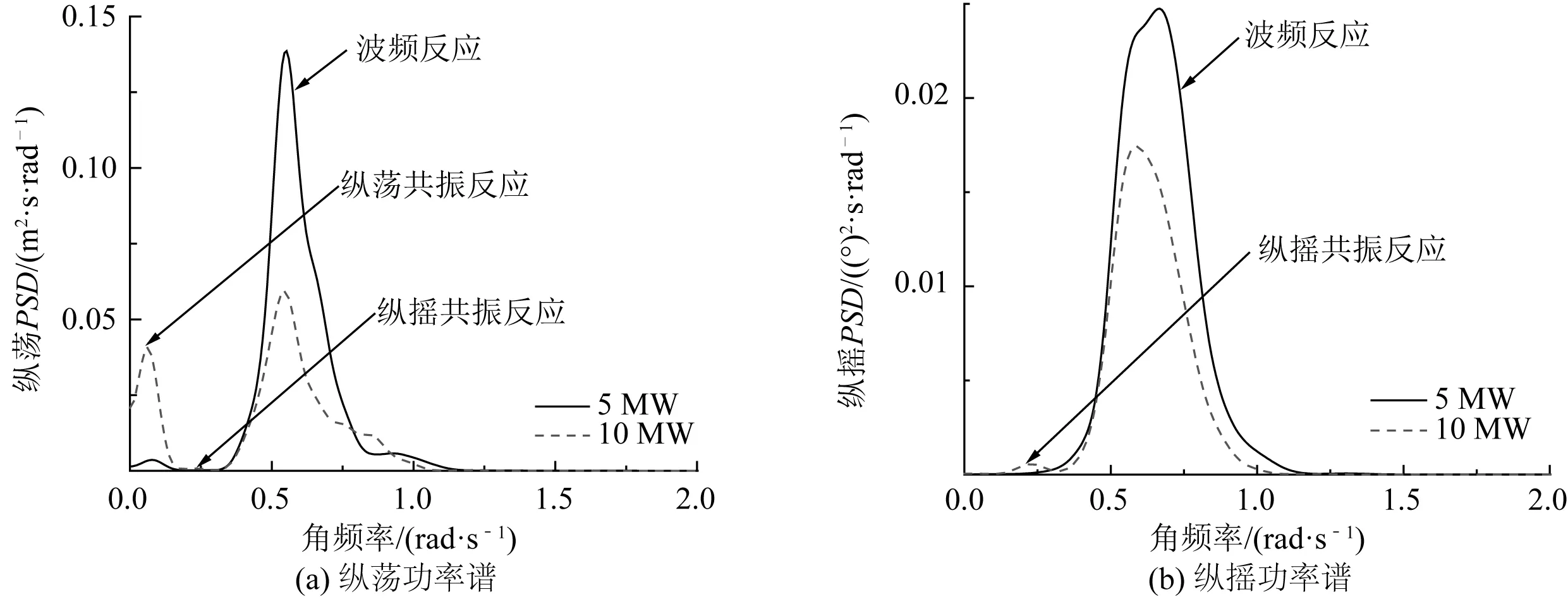
图5 平台运动功率谱Fig. 5 Power spectrum density(PSD)of platform motions
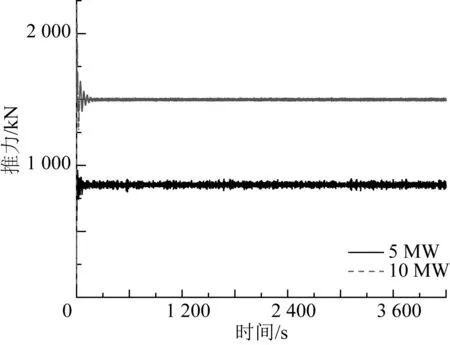
图6 推力时程Fig. 6 Time histories of thrust
4.3 风力机叶片动力响应
由表7中5 MW和10 MW风力机叶根面外弯矩(RootMyc1)统计值可知:由于10 MW 风力机叶片大型化后,风力机叶片变的更柔,导致10 MW风力机叶根面外弯矩的极值、均值和波动幅度在各典型工况下均较5 MW风力机增大,特别是在额定风速工况下,5 MW和10 MW风力机叶根面外弯矩的均值相差2.92倍。
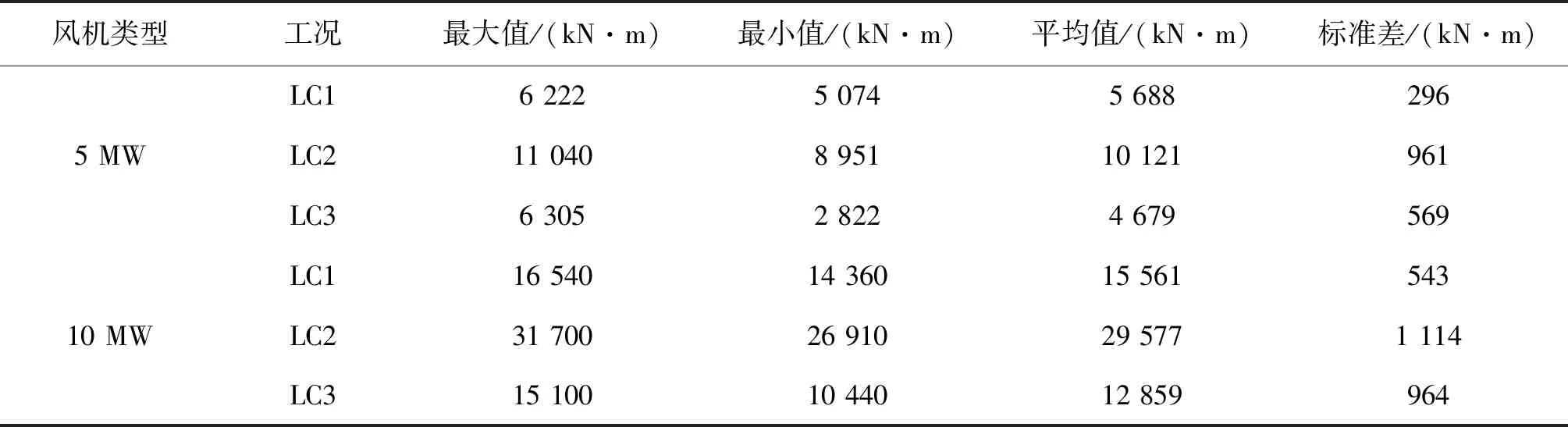
表7 叶根面外弯矩统计Tab. 7 Statistics of blade-root out-of-plane bending moments
由图7中5 MW和10 MW风力机在LC2工况下叶根面外弯矩反应功率谱对比可知:5 MW和10 MW风力机叶根面外弯矩反应均主要受到1倍的飞轮转动频率的激励作用,其对10 MW风力机叶根面外弯矩反应的激励作用更为显著。此外,相对于10 MW风力机,3倍的飞轮转动频率对5 MW风力机叶根面外弯矩反应的激励作用较明显,而波浪荷载对10 MW风力机叶根面外弯矩反应的激励作用更为突出,这主要由于10 MW风力机系统大尺寸的支撑平台使得其遭受较大的波浪荷载,而较大的波浪荷载导致超大型浮式风力机系统产生强非线性运动,并引起风力机系统结构的剧烈震荡,特别对于超大型风力机巨大柔性的叶片,波浪荷载引起叶片结构的震荡更为剧烈,这导致超大型风力机叶根弯矩反应大幅增加。
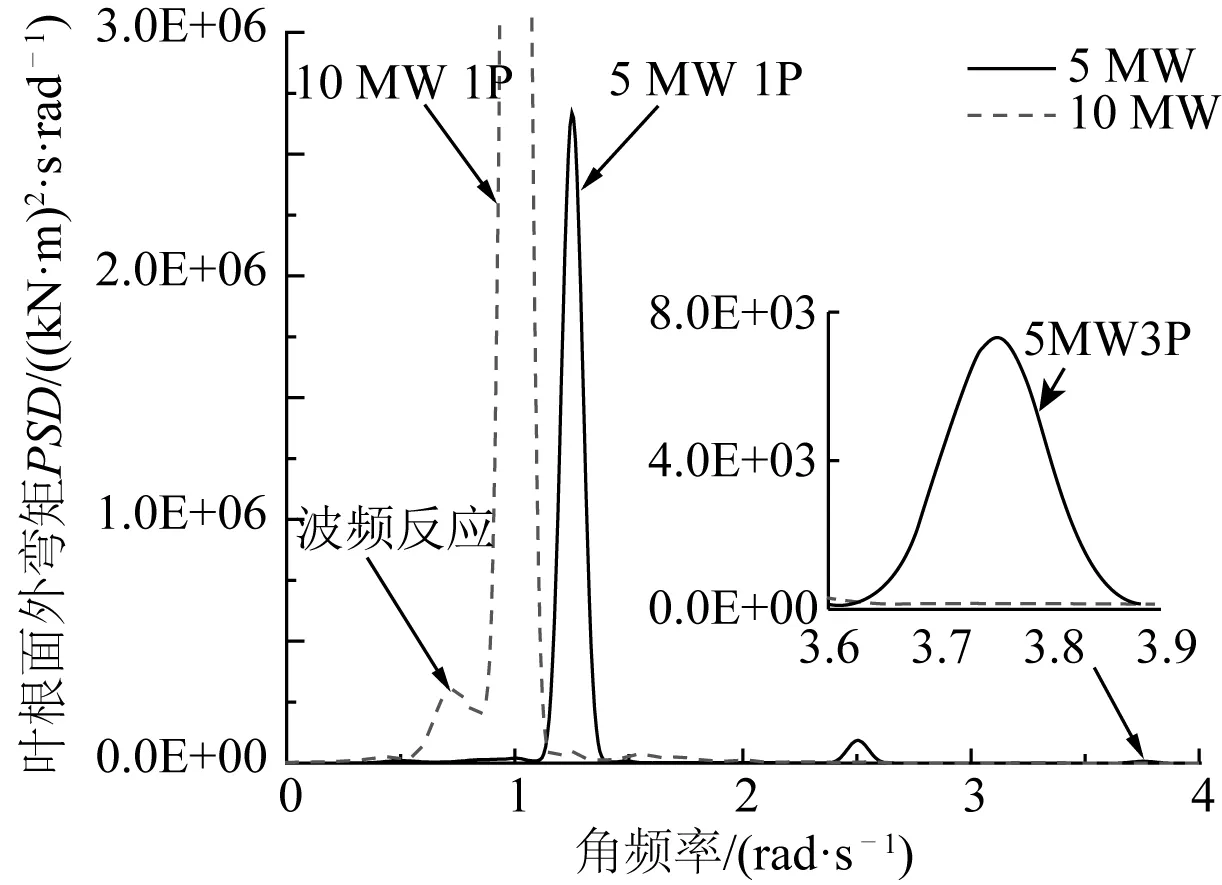
图7 叶根面外弯矩功率谱Fig. 7 PSD of blade-root out-of-plane bending moments
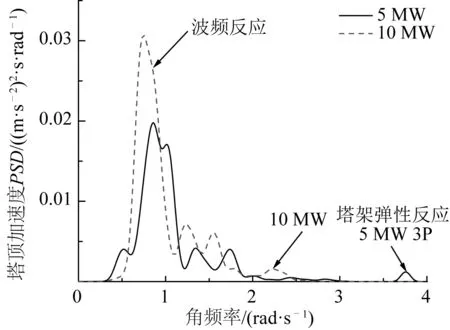
图8 塔顶加速度功率谱Fig. 8 PSD of tower top acceleration
4.4 风力机塔架动力响应
由表8中5 MW和10 MW风力机塔顶加速度统计值可知:在各典型工况下5 MW和10 MW塔顶加速度动力响应差别不大,且其最大值均出现额定风速工况,主要由于此时作用在塔顶的推力最大。
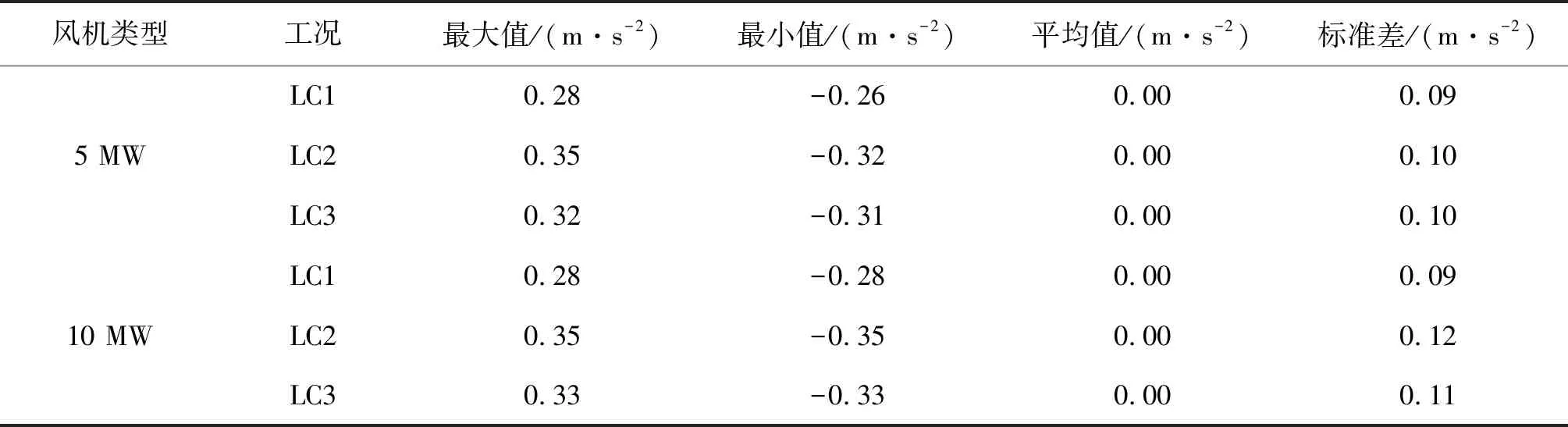
表8 塔顶加速度统计Tab. 8 Statistics of tower top acceleration
由图8中5 MW和10 MW风力机在LC2工况下塔顶加速度反应功率谱对比可知:5 MW和10 MW风力机塔顶加速度反应均主要由波浪荷载的激励作用主导,且波浪荷载对10 MW风力机塔顶加速度反应的激励作用更为显著;同时高频塔架弹性反应对10 MW风力机塔顶加速反应的激励作用也较为明显;但3倍的飞轮转动频率对5 MW风力机塔顶加速度反应的激励作用更为突出。
由表9中5 MW和10 MW风力机塔基弯矩统计值可知:风力机大型化后,飞轮、机舱、塔架的质量以及塔架高度大幅度增加,且半潜浮式风力机系统所受的气动荷载和水动力荷载均显著增加,这使得各典型工况下10 MW风力机塔基面外弯矩的极值、均值及波动幅度均显著大于5 MW风力机,特别在LC2工况下,10 MW风力机塔基弯矩的最大值是5 MW风力机的2.98倍。
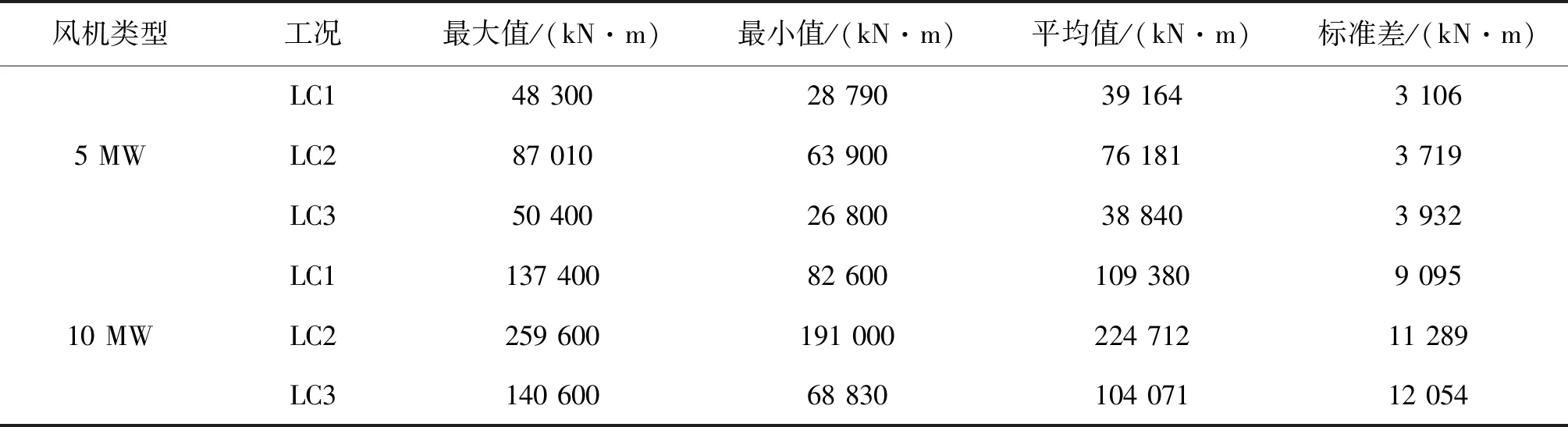
表9 塔基面外弯矩统计Tab. 9 Statistics of tower-base fore-aft bending moments
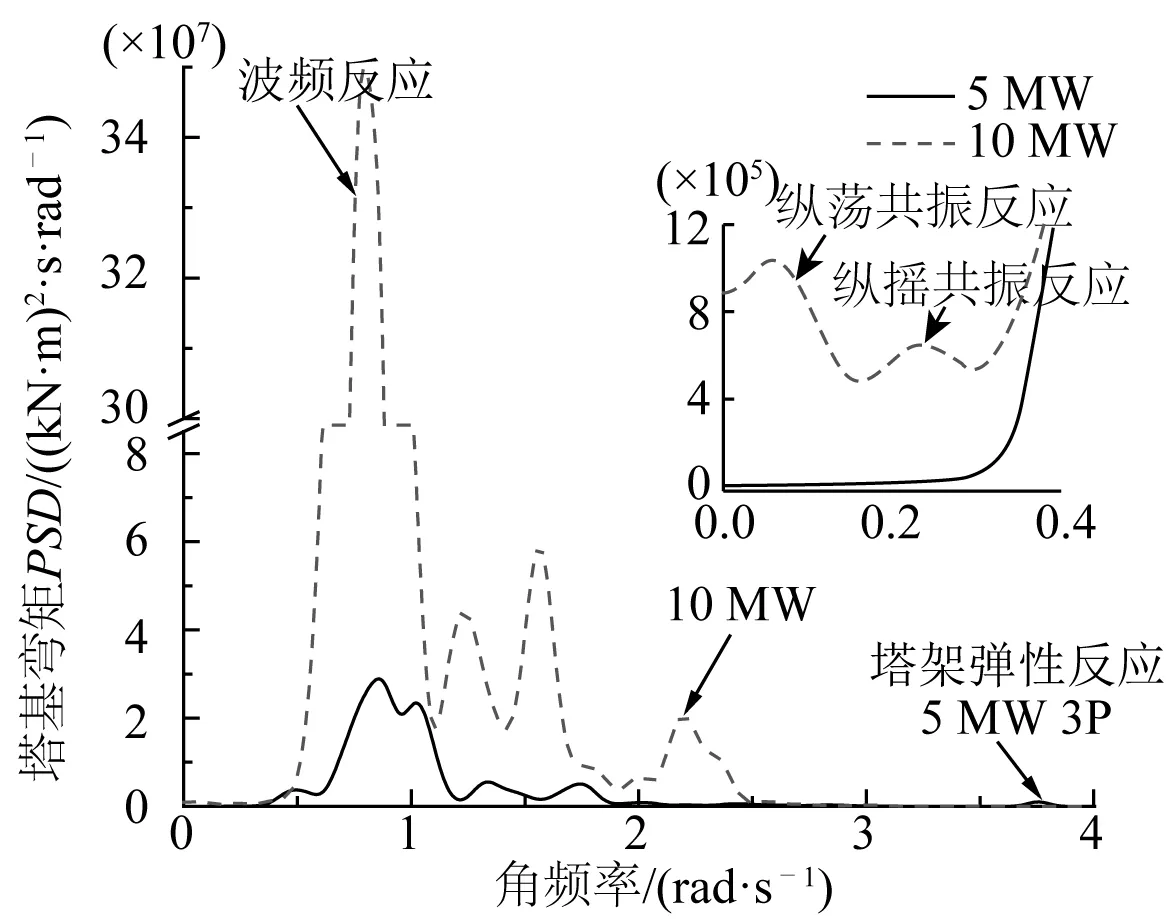
图9 塔基弯矩功率谱Fig. 9 PSD of tower-base fore-aft bending moments
由图9所示5 MW和10 MW风力机在LC2工况下塔基弯矩反应功率谱对比可知:5 MW和10 MW风力机塔基弯矩反应均以波浪荷载的激励作用为主,且波浪荷载对10 MW风力机塔基弯矩反应的激励作用更为显著。这主要由于超大型浮式风力机所遭受的大波浪荷载引起风力机结构剧烈震荡,且因超大型风力机超高柔性塔架和较大的转子和机舱质量,使得风力机结构的震荡效应被放大,并最终导致塔基弯矩反应大幅增加。但3倍的飞轮转动频率对5 MW风力机塔基弯矩反应的激励作用较10 MW风力机明显。此外,由风荷载激励产生的平台低频运动以及高频塔架弹性反应也会引起10 MW风力机塔基弯矩反应的产生。
4.5 风力机锚链张力反应
以顺风向锚链ML1为研究对象,如图2所示,并由表10中5 MW和10 MW风力机锚链ML1张力统计值对比可知:在各典型工况下,10 MW风力机锚链张力的极值、均值及波动幅度均较5 MW风力机显著增大,特别在LC2工况下因平台纵荡运动平均偏移最大,故顺风向锚链ML1张力均值最小,但10 MW风力机锚链张力的均值是5 MW风力机的3.1倍。因此。对于大型半潜浮式风力机,必须依靠锚链张力来降低平台纵荡运动响应。
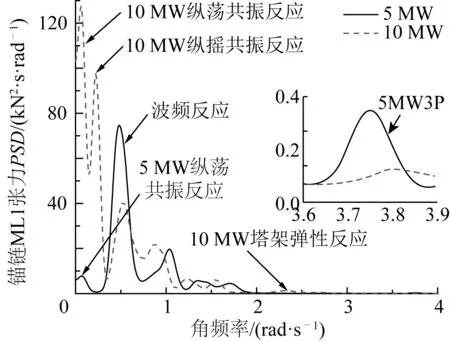
图10 锚链张力功率谱Fig. 10 PSD of mooring lines tension
由图10所示5 MW和10 MW风力机在LC2工况下锚链张力反应功率谱对比可知:5 MW和10 MW风力机系泊系统在海洋环境中主要受到与浮式平台低频运动(纵荡和纵摇)相关的风荷载低频激励作用、波浪荷载的波频激励作用以及由高频塔架弹性反应、高倍的飞轮转动频率引起高频激励作用,其中由风荷载激励产生的平台低频运动和塔基弹性反应对10 MW风力机锚链张力反应的激励作用明显高于5 MW风力机,同时也进一步表明浮式平台运动与锚链张力反应之间存在明显的耦合效应。但波浪荷载对5 MW风力机锚链张力反应的激励作用较为明显。此外,3倍的飞轮旋转频率对5 MW和10 MW风力机锚链张力反应的激励作用相接近。
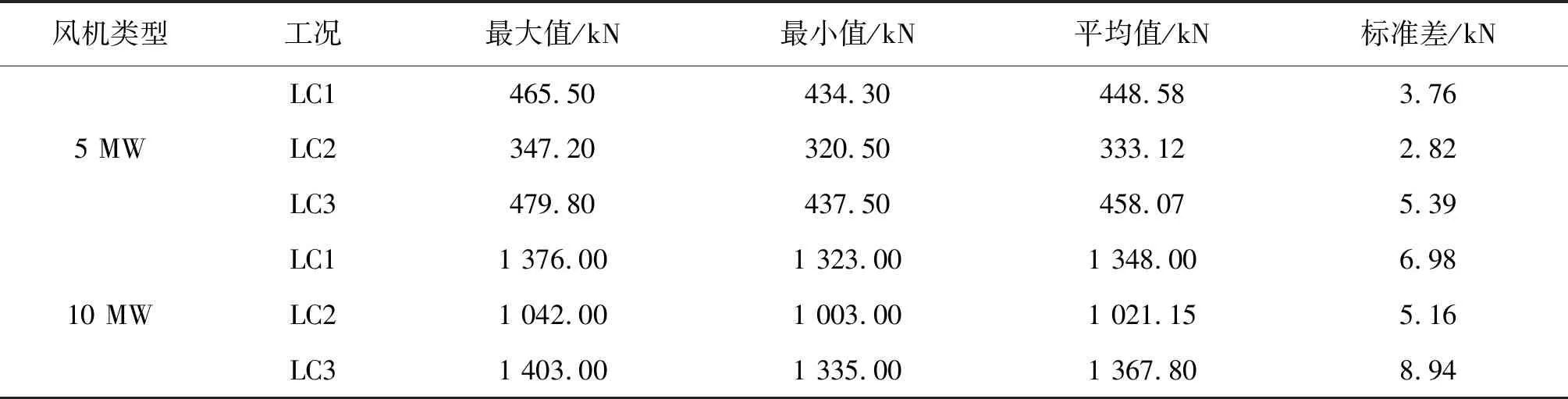
表10 锚链张力统计Tab. 10 Statistics of mooring lines tension
5 结 语
1) 在典型工况下,大型和超大型风力机动力响应统计值除塔顶加速度反应相近外,叶根弯矩、塔基弯矩以及锚链张力成倍增加,但平台运动响应未线性增加,这体现了浮式风力机系统强非线性特点。
2) 在风浪联合作用下,1倍飞轮转动频率和波浪荷载对超大型风力机叶片动力响应的激励作用较为明显,但相对于超大型风力机,高倍飞轮转动频率对大型风力机叶片动力响应的激励作用较为明显。
3) 在风浪联合作用下,大型和超大型风力机塔顶加速度和塔基弯矩反应均以波浪荷载激励为主,并且相对于超大型风力机,3倍的飞轮转动频率对大型风力机塔顶加速度和塔基弯矩反应的激励作用比较明显,但高频塔架弹性反应对超大型风力机塔顶加速度和塔基弯矩反应的激励作用较为显著。此外,超大型风力机的塔基弯矩反应也会受到平台低频运动的激励作用。
4) 浮式风力机大型化后,相较于水动力荷载,风力机气动荷载增大的比例更大,这使得超大型浮式风力机平台由风荷载激励产生的低频运动比例增大,波浪荷载激励产生的波频运动的比例减小,即气动荷载效应对超大型风力机系统运动响应的激励作用更为突出,这也导致了由风荷载激励产生的平台低频运动对锚链张力反应的激励作用更为显著。