激光导航小车入库规划
2020-05-09蒋如飞张伟军
蒋如飞,张伟军
(上海交通大学机械与动力工程学院,上海 200240)
0 引言
导航小车是智能工厂柔性化重要的一环,通过导航小车在不同工位之间穿梭、配合,工厂内的生产线可以做到按需搭配,大大提高生产线的效率和灵活性[1]。根据原理,导航小车可分为路标导航和激光导航[2],其中路标导航需要在工厂内铺设磁钉、二维码等路标[3],而且小车的运动路线必须经过这些路标以矫正位置;激光导航则灵活许多,小车可以通过激光雷达实时确定自身的位置,而且不需要事先改造工厂,因此成为许多智能工厂的选择[4]。在导航小车结束任务后,一般需要进入事先规定好的停车位保管。然而,由于小车往往呈长方形,而目前的规划算法大多没有考虑到小车的形状和朝向,需要小车先走到位置,再旋转自身达到目标角度,所以算法目标位置为狭窄的停车位时,往往会规划失败。
在此,提出了一种导航小车,并针对入库问题改进了规划方法,可以让导航小车平稳地进入较狭窄的终点,使自动入库成为可能。
1 激光导航小车硬件设计
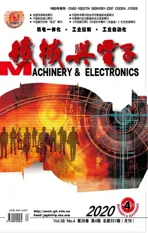
激光导航小车的硬件示意如图1所示,实物如图2所示。为了方便规划,小车采用了差速的控制方法,位于中间的一对主动轮是小车主要的动力提供手段。差速控制可以实现直行、原地旋转、固定半径转弯等功能,为更上层的路径规划提供了很好的基础。主动轮的速度控制与跟踪由电机驱动器完成,单片机只需要通过485通讯按格式发送固定加速度限制下的期望速度值即可。不只是控制电机,单片机还可以实时控制LED状态灯,收到主控电脑的设定值后可更改LED灯的颜色显示状态。在这种设计中,电机控制任务被分给3个单元执行,最需要实时性的速度跟踪部分由驱动器完成,需要稳定及时反馈设定速度值的任务由单片机完成,主控电脑只需要根据算法按周期发送速度值即可。
除了电机控制,传感数据的反馈也是导航小车正常工作的重要依靠。传感数据主要分为2个部分。一是周围障碍物跟小车的位置关系,由2个270°的旋转式激光雷达分布在对角感应。探测到障碍物后,得到的数据是障碍物相对雷达的角度和距离,需要合并到小车的中心坐标系,转换公式为:
图1 激光导航小车硬件示意
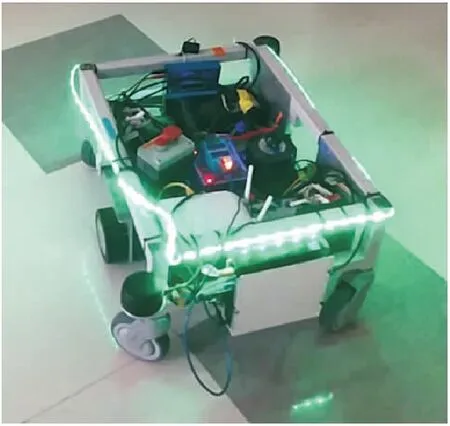
图2 激光导航小车实物
xagv=xbeam+ρcosθ
(1)
yagv=ybeam+ρsinθ
(2)
xbeam和ybeam表示雷达的位置;xagv,yagv表示障碍物在导航小车下的位置;ρ为障碍物到雷达的距离;θ为障碍物在雷达坐标系中的角度。
另一个重要的传感数据是主动轮的角度编码器,经由驱动器、单片机反馈到主控电脑。主控电脑通过2个主动轮的角度值可以得到小车实际行走的角速度和前进速度,由主动轮半径、主动轮距离决定,计算公式为:
(3)
(4)
ωwheel1为小车左轮角速度;ωwheel2为小车右轮的角速度;rwheel为车轮半径;dwheel12为左右轮距离;ωagv为导航小车角速度;vagv为导航小车的速度。
除了发送电机速度指令和接收传感数据,主控电脑还需要运行规划和导航算法,并从路由器里接收操作人员的运行命令。路由器是操作人员和导航小车交流的媒介,操作人员通过Wi-Fi连接到路由器后,通过TCP协议往指定的IP地址和端口发送命令,可实现手动控制小车行走或设定目标让小车自动导航。
2 动态窗口规划及改进
为了使小车平稳、无碰撞地到达指定的地点和角度,需要规划出一条满足小车动力学约束并避开障碍物的轨迹。常见的一种方法是动态窗口规划[5],其主要由5个部分组成:
a.根据最大速度、最大角速度的限制离散采样目标速度,将小车尽量加速或减速到设定的速度。
b.根据每个采样的速度模拟一段时间,得到多条模拟的轨迹。
c.对每条轨迹打分,打分考虑的因素有离障碍物的距离、离目标的距离等,如发生碰撞则直接去除。
d.选出得分最高的轨迹,将当前速度和角速度下发到单片机执行。
e.每隔一段时间重新采样、打分;到达目标左右后停止,原地旋转到目标角度。
动态窗口规划兼顾了小车动力学限制、设定速度限制、障碍物限制等,而且计算量小,实时性强,是一种十分实用的基于采样的规划算法。然而,该算法仅把导航小车视为质点规划,规划轨迹在局部多为弧形。当小车不是圆形时,要经过狭窄的通道时往往需要较窄的边正对着通道口才能通过。因此对于长方形的小车而言,除非小车刚好在当前位置、当前角度可以以弧形轨迹或直线轨迹通过,否则很难用动态窗口规划的方法解决。所以,动态窗口规划难以处理导航小车入库的情况。对此情况,提出一种分段规划入库的改进方案,入库规划改进对比情况如图3所示。
图3 入库规划改进示意
对于狭窄通道,一个简单有效的方法是先走到正对通道的位置,原地调整角度,然后直接沿直线走进去即可。所以,本设计的改进将动态窗口规划分为2个阶段:第1阶段走到目标位置的直线可达且可以任意原地旋转调整方向的地方,然后调整角度到正对目标的角度;第2阶段沿直线规划走到目标点即可。由于目标直线可达位置有无数个,最佳的选择是直线上离目标位置最近的点。同时,考虑到车库周围的障碍物地图可能并不是一个长方形,而且最终目标角度的反向延长线可能会与障碍物发生碰撞,因此不宜直接以车库周围障碍物的对称轴或目标方向为直线,而是以最不可能发生碰撞的角度为准。基于以上考虑,本改进的具体步骤如下:
a.在障碍物地图中进行模拟,向左旋转目标位置处的小车,记录发生碰撞的角度;同理向右旋转得到右旋碰撞角度,取2个角度的均值为“退车”角度。
b.沿“退车”角度从近到远离散采样位置点,到某一点可以原地360°旋转仍无任何碰撞为止,记录该点为第1阶段目标点。
c.用动态窗口规划使小车走到第1阶段目标点。
d.沿直线规划走到最终目标点,调整角度到最终目标角度。
3 仿真实验结果
为了测试改进算法的有效性,本文针对性地设计了入库场景的仿真实验。实验中,目标点位于狭窄的通道中,通道两旁是虚拟的障碍物;仿真小车长1 m,宽0.5 m,最大速度为0.5 m/s,加速度为0.2 m/s2,最大角速度为40(°)/s,角加速度为1(°)/s2;小车要求离障碍物有0.2 m的安全距离,同时运行必须满足动力学的约束。改进前的动态窗口规划算法如图4所示,导航小车径直走向目标,但由于障碍物的环绕无法到达目标点,最终卡住无法前进。改进后的算法分2个阶段:第1阶段到达一个要求较低的目标点,如图5所示;在第2阶段,小车从第1个目标点出发重新规划,最终规划出一条接近直线的平滑曲线达到目标点,如图6所示。

图4 动态窗口规划轨迹
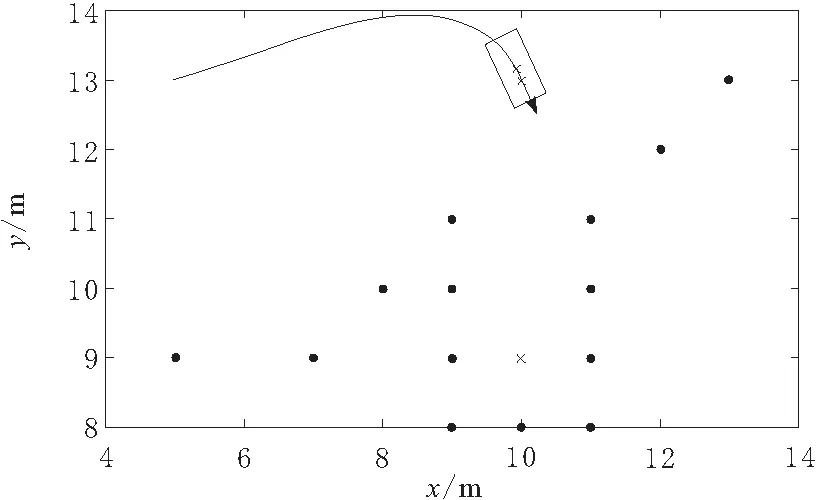
图5 改进算法第1阶段规划轨迹
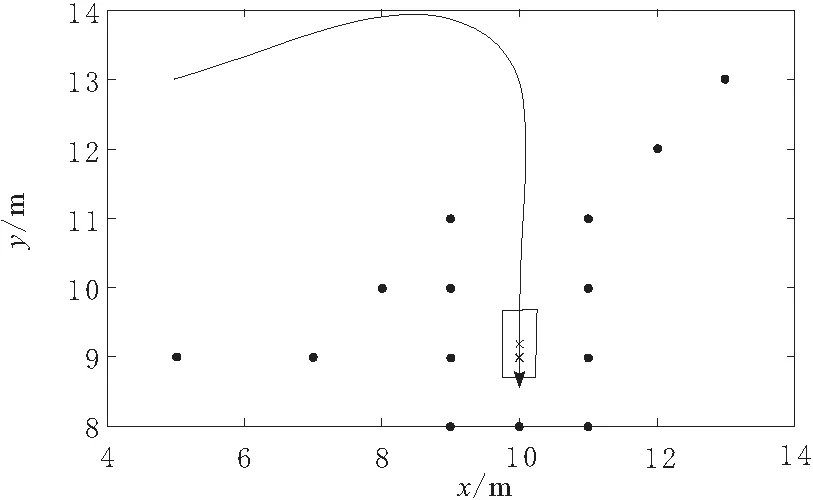
图6 改进算法最终轨迹
经过改进,导航小车避免了因直接规划较困难的目标点所导致的失败,先走到较轻松的目标点;而第1阶段的目标点到最终目标点要比一开始的起点要容易许多,因此结合2个阶段可以较好地完成狭窄通道的路径规划。在障碍物不变的条件下,从目标左侧x坐标5~7 m,y坐标11~13 m的矩形范围内9个点出发多次仿真,改进前仅有1次成功,成功率为11.1%;而分阶段规划法改进后均能够到达目标点。
4 结束语
动态窗口规划是一种离散采样的规划方法,可根据各种条件灵活设置采样的范围、模拟的时间和模拟轨迹评价的方式等,因此可以满足激光导航小车各种动力学、速度的限制,同时可以很好地避障。然而,由于动态窗口规划没有考虑到模拟时间之后的轨迹情况,往往会在狭窄的地方规划失败。通过改进规划算法,本文提出了2个阶段的规划策略,其中第1阶段仍然使用动态窗口规划,第2阶段考虑到狭窄位置对导航小车角度的限制,将第1阶段的终点设置在直线可达且可任意旋转角度的地方。由于选用的第1个终点对于第1阶段规划难度低,同时也方便了第2阶段的规划,所以大大提高了规划成功的可能性。改进后,在原来动态窗口规划难以处理的入库场景中成功地完成了轨迹规划,实现了导航小车的自动入库。