钻机提升平台安全监控系统在石油勘探中的设计与应用
2020-05-09韩同方
韩同方
(中石化胜利石油工程有限公司井下作业公司,山东 东营 257100)
0 引言
钻机升降平台是石油勘探中不可缺少的设备之一,整个平台主要包括顶部驱动器、移动块钩、油井架和司钻室,顶部驱动器(顶驱)带动钻具旋转,循环泥浆、卸扣、接管[1-3]。输油井架上放置顶块,用于吊挂移动块钩和顶部驱动器,并存放钻杆。司钻室集各种电气、机械、通信技术于一体,为司钻提供了舒适的工作环境。钻机提升平台是钻井作业的基石,由于实际工作条件和工作环境的复杂性,安全保障显得尤为重要。解决钻井过程中的安全隐患,妥善记录事故造成的人员伤亡和经济损失是当务之急。
众多科研机构和学者对钻机提升平台安全监控系统进行了研究,取得了显著成果。关于钻井安全的研究主要利用互联网远程监控技术、基于可编程控制器(PLC)技术的钻井安全监控、基于IP网络协议分发技术的实时显示技术、分布式数据采集等系统技术等[4-6]。本文利用罗克韦尔PLC系统和Profibus技术,设计了一套较为完整的钻机提升安全监控系统。该系统实时采集钻井作业参数,通过采集数据分析顶驱工况和钻井地层一般情况,特别是移动块钩的自动控制,系统将其移动到默认位置,以提高工作效率和安全性。设计了司钻工作疲劳提醒和井架检查定期提醒,减少了人为的安全隐患,将整个系统应用于现场测试和运行,验证该系统使用中提高钻井的安全性和工作效率状况。
1 安全监控系统
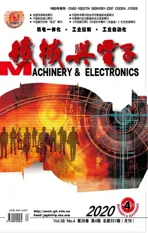
钻机提升平台监控系统由上位机、可编程逻辑控制器PLC和设备层组成[7-8],整个系统的网络组成如图1所示。钻机提升平台监控系统是传输所有类型数据的系统的枢纽。可编程序控制器PLC具有许多优点,除石油化工领域外,在其他领域也广泛使用。
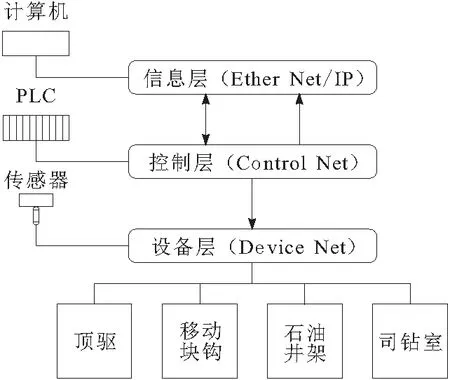
图1 整个系统的网络结构
可编程逻辑控制器的主要优点如下:
a.可靠性高,抗干扰能力强。
b.配套设施齐全,功能齐全,适用性强。
c.丰富的I/O接口模块。
d.体积小、重量轻、能耗低。
e.通用性强,控制程序可变,使用方便。
除了控制层,信息层和设备层都有自己的功能,信息层将数据显示给用户,使用户能够直观地了解场景,并通过该层发送命令控制现场设备。设备层类似于人体皮肤组织,可以将现场情况转换成相应的电压或电流信号。整个系统的工作流程是:设备层将现场场景转换成相应的电压或电流信号,控制层采用现场总线技术采集电压或电流信号,信息层作为最后一步,利用专门的处理软件对数据进行分析,并在屏幕上显示场景的工作状态。本文中使用RSLogix5000分析数据和力控监视器配置。信息层根据控制层将控制信号传输到设备层。
2 安全监控系统设计
2.1 顶驱监控设计
随着钻井技术的发展,顶驱钻井系统[9-10]逐渐取代了旋转钻机。在钻井过程中,顶驱钻井系统提供钻井动力,使钻井液不断循环,减少了单管连接的数量,在整个钻井过程中起着重要的作用。因此,实时掌握顶驱钻井系统工作状态是必要的。顶驱钻井系统主要由顶钻电机组件、电机支架/导向块组件、钻杆组件的装卸装置以及其他辅助系统组成。顶钻电动机组件提供钻孔动力,并使电动机速度和电动机温度能够指示电动机是否正常运行。由于冷却风扇的风压也会影响电机温度,因此需要对其进行监控。在钻进过程中,如出现卡钻等需要停止电机的事故,则应控制制动缸的压力。改变制动缸压力可以实现该控制系统的自动起停电动机控制。钻杆总成的补装或拆装装置为起下钻提供服务,它具有顶驱钻井设备最大的优点,可以节省钻井时间,降低工人的劳动强度。因此,该部位的监测对钻井作业至关重要。通过对转塔头电机的控制,可以实时掌握转塔头的位置;通过控制倾斜结构的油缸压力,可以确定倾斜位置结构。更重要的是,能够监控井中的压力并及时发出警报。顶驱钻井系统的监测参数如图2所示。本文对DQ-90型顶驱的监控系统进行了研究,DQ-90型顶驱的设计参数如表1所示。
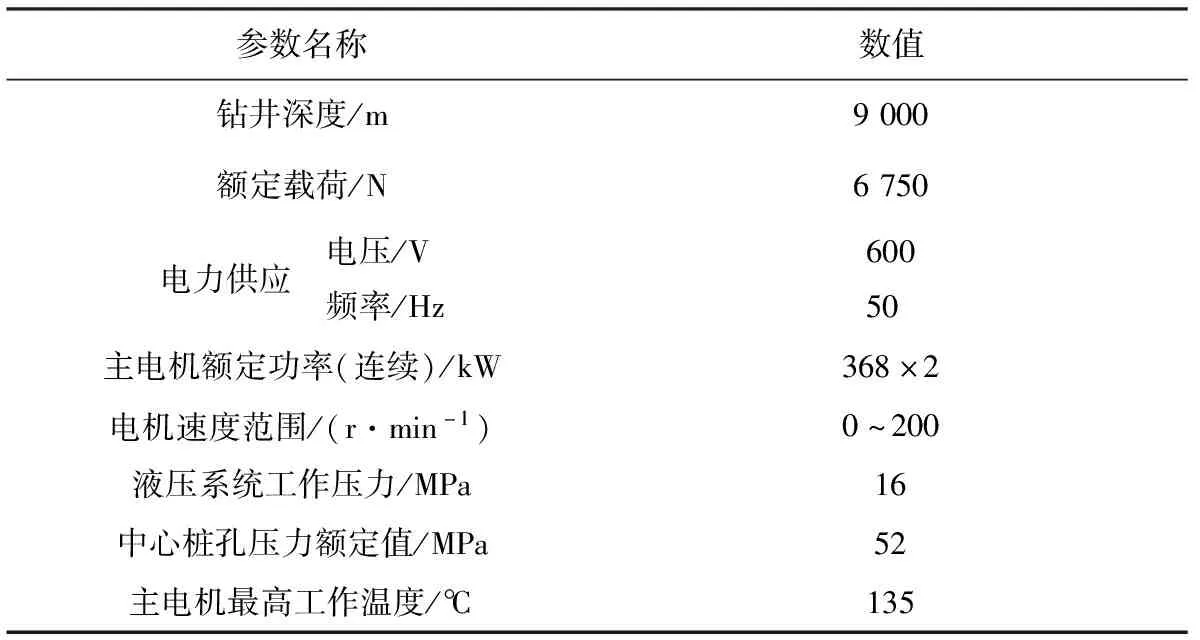
表1 DQ-90顶驱设计参数

图2 顶驱系统参数
2.2 移动块钩监控设计
在钻井过程中,移动块可以减轻绞车的工作负荷,是连接单根、钻孔和跳闸时不可缺少的。在正常钻井过程中,在连接一根管道时,钻孔是连续开挖的,管柱应始终连接。司钻调整移动块吊钩高度以适应单根管道的连接操作。由于司钻的角度有限,因此有必要监视和控制移动块钩的高度。除了增加冠块保护器外,还在自动按钮控制中增加了1个特殊的挂钩定位。在井架的默认位置上安装1个发射机,在移动块上安装光敏传感器,对到达默认位置的光敏传感器信号进行检测,系统判断是停止还是继续移动。当按下按钮时,挂钩会自动移动到默认高度,该机构用于特殊紧急情况,而不是手动控制。钻井作业需要不同的钻井压力[11-12]。移动块吊钩的高度根据井下作业的需要进行调整。由于技术的限制,很难掌握地下的工作情况。所以增加了1个应急装置,当卡钻或钻井过程中发生其他紧急情况时,发出警报,立即停止整个系统。移动块钩的监控参数如图3所示,几个参数之间没有直接关系。应急装置为工作人员提供了一种处理突发事件的方式,警报设备则提醒员工系统已到达安全极限位置。
图3 移动块钩参数
2.3 井架及司钻控制室监控设计
井架和司钻控制室是钻井设备的重要组成部分。井架支撑着整个起重设备,是各种钻具可以方便地升降或悬挂的地方。然而,石油钻井是在困难的条件下进行的,因此掌握井架的工作条件很重要。在野外作业中,经常忽略井架状态的定期检查。可编程逻辑控制器PLC需要一个定时提醒装置,在系统定时发出报警指令的同时,提供一个延时控制程序。与其他系统一样,风环境的监测也是必不可少的,当风达到预设的报警值时,将触发报警。司钻控制室是平台的大脑,是司钻所在的位置,显示了许多仪器,进行重要的钻井作业。因此,司钻的工作环境很重要,对司钻控制室的温湿度进行监控是必要的。本文设计了司钻工作疲劳提醒系统,以考虑司钻的疲劳。本文对A型井架监控系统进行了研究,钻机提升平台(A型井架)如图4所示,A型井架参数如表2所示。

图4 钻机提升平台(A型井架)
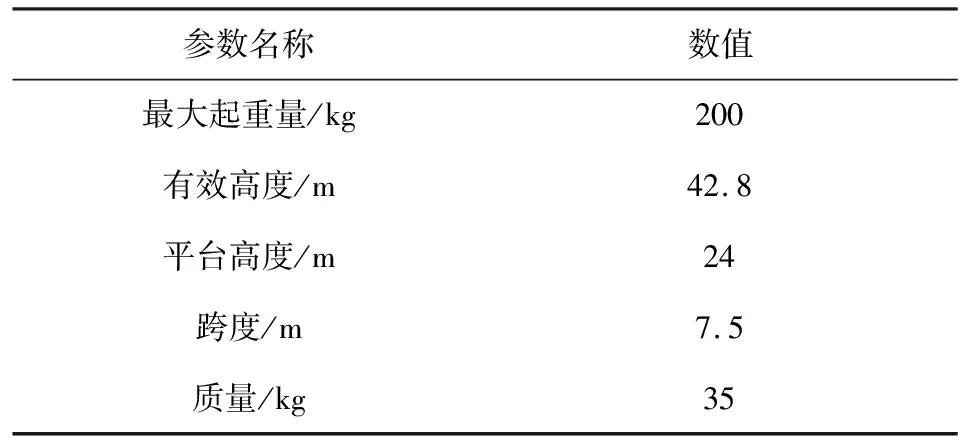
表2 A型(MA-250)井架参数
2.4 实现监控系统功能
如上所述,通过对顶驱系统、吊钩提升系统、井架系统、钻井控制室等参数的监控来确保钻井操作的安全性。监控系统的具体功能如下:
a.对顶驱系统工作参数、电机温度、电机转速、冷却风扇压力、减速箱油压、制动缸油压、转塔头电机转速、倾斜结构油压、井压进行实时监控。
b.一旦检测到危险信号,受控行车钩将自动运行到指定位置并启动紧急制动。
c.对司钻的工作时间进行计算和控制,避免过度疲劳。
d.提醒井架检查人员定期对井架的工作状态进行评估。
e.监测到危险信号时及时发出警报。
f.监控历史数据,包括历史曲线的存储和显示,并生成报告。
3 软件设计与实现
控制功能的软件设计和应用是整个监控平台系统的核心。基于现场总线技术,传感器模块和可编程逻辑控制器PLC采集数据,并利用工控机对数据进行处理。通过检测信号和确定异常信号,控制执行器发出报警并运行启停电机等控制操作。整个监控系统由力控组态软件、RS5000编程软件和RSLinx通信软件组成。力控组态软件是北京三维力控科技有限公司开发的专业监控组态软件,可广泛应用于石油天然气、化工、煤炭、电力、环保、能源管理、智能建筑等领域;RS5000编程软件是美国罗克韦尔自动化公司的PLC梯形编程软件;RSLinx通信软件是控制控制器与计算机之间通信的软件,也是罗克韦尔自动化公司的产品。
3.1 力控组态软件的开发与设计
力控组态软件包括人机界面视图、项目经理、I/O驱动、实时数据库DB、发电机控制策略以及其他Web服务组件。I/O驱动程序[13]和实时数据库DB可以实现变量配置和OPC数据库的链接或强制控制配置。该软件采集现场数据并控制系统过程,采用灵活的“配置方式”集成系统。设置预设软件模块以获得简单的配置,并监视控制层。该软件使用方便,大大提高了集成系统的效率。监视配置屏幕根据系统的硬件结构和开发设计。登录系统和操作系统需要专门的管理员,因此系统需要登录权限管理,随后构建配置屏幕的每个部分。
a.顶驱钻井系统。顶驱钻井系统包括许多监视参数,并且需要实际的工程应用程序来简洁、直观、方便地配置屏幕。由于顶驱系统多为液压控制,所以油压对顶驱非常重要。
b.井架和司钻控制室。监视配置屏幕考虑了钻井工人的工作环境并降低了他们的工作强度。屏幕显示司钻控制吊钩高度控制按钮所需的便捷参数,提醒灯设置在引人注目的位置。
3.2 程序的设计与编程
RSLogix5000被应用到程序中。该软件为可编程控制器提供集成的编程环境,并考虑用户的实际需要。用户可以输入和编辑可编程逻辑控制器PLC程序,对程序进行注释和检查,管理文件等。
3.2.1 I/O配置到本地模块
在编程之前,将I/O配置作为一个重要步骤添加到本地模块。可编程逻辑控制器PLC具有本地输入和输出模块,分别为模拟输入和模拟输出以及数字输入和数字输出。选择正确的连接模块非常重要。
3.2.2 顶驱系统程序设计
顶驱系统程序设计如下:启动可编程逻辑控制器PLC,并且初始化模块,确定是否按下驱动器启动按钮;启动顶部驱动器后,实时收集并处理冷却风扇的电动机温度、电动机速度和风压,以确定温度是否高于135 ℃和风压是否小于1 MPa;如果超过预设的温度和风压,则电机将发出警报并制动,程序流程如图5所示。其他采集模块是对变速箱油压降低的实时监控,根据顶驱液压设计手册,液压系统的额定压力为16 MPa,当油压超过系统额定压力时,系统发出报警并启动紧急制动,程序流程如图6所示。
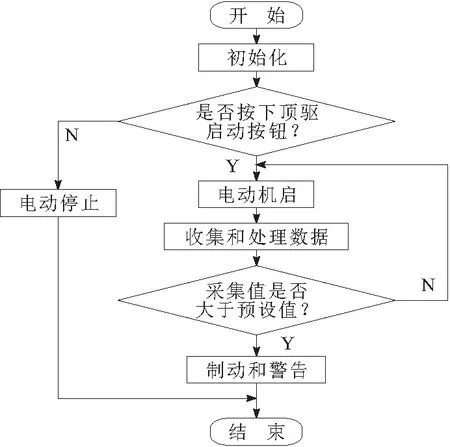
图5 上位机程序流程

图6 液压系统程序流程
3.2.3 井架与司钻室系统程序设计

图7 移动块钩程序流程
移动块钩存在于井架中,在这个系统中,光敏传感器[14]被用来确定移动块钩是否到达指定的位置。模块已初始化,确定是否按下绞车启动按钮,确定是按下自动按钮还是按下手动按钮,确认挂钩是上升还是下降。当自动按钮被按下,且当挂钩到达指定位置并检测到光敏传感器信号时,挂钩将停止在指定的工作位置。如果按下手动按钮,司钻将手动操作吊钩的高度,程序流程如图7所示。
延时程序中应定期检查井架和司钻的疲劳工作情况,并提醒其注意事项。井架中装有司钻安装保护按钮和井架检查按钮,当司钻安装护板按下安装保护按钮时,系统开始监视时间。井架的定期检查与司钻安装护罩的检查相同,程序流程如图8所示。
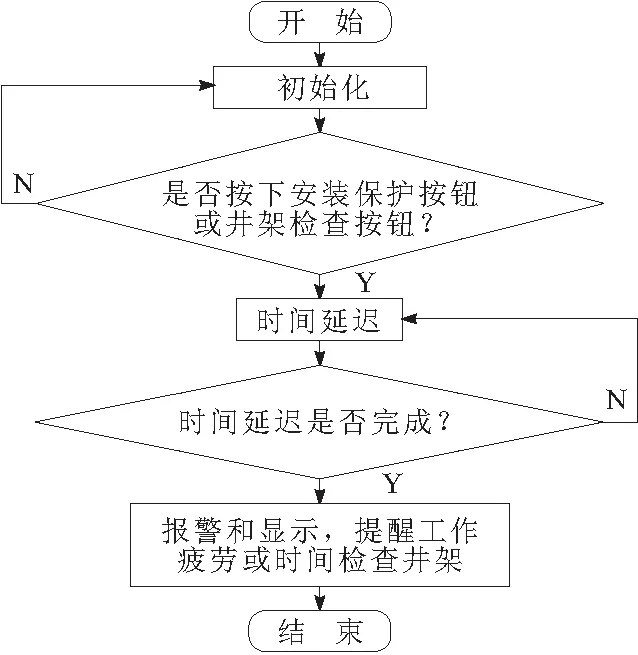
图8 报警程序流程
4 实际应用
该系统在实验室测试和运行中取得了成功。测试结果良好,各项参数的实时采集和控制取得了成功。经实验室测试,该监测系统也成功应用于钻井现场的相应功能。
4.1 顶驱监控系统的应用
顶驱监测系统在四川井场成功应用。系统操作过程如下:安装相应的传感器和可编程控制器PLC,连接信号线,启动系统。分析参数形成报表,并接收一段时间内的钻井情况。例如,所分析的电机转速和温度可以解释主电机的性能、钻井液的不同性能、电机电源是否稳定以及地层条件。最重要的是,这些数据可以用来确定顶驱的工作状态,并及时发出警告进行检修,避免钻井安全事故的发生。
4.2 移动块钩监控系统的应用
该移动块钩监测系统在四川某井场成功应用。移动块钩显著降低了钻井工人的劳动强度。在钻井作业现场,自动按钮使吊钩自动升至当前高度,吊钩准确达到预设高度,进行脱扣作业。在实际测试中,设置移动块钩的默认高度为24 m,分别记录手动操作和自动操作时,移动块钩的高度变化。比较人工和自动操作的时间变化,钩的运动曲线如图9所示。考虑到手动操作中的其他不可控因素,自动操作比手动操作更快、更平稳地达到默认点。
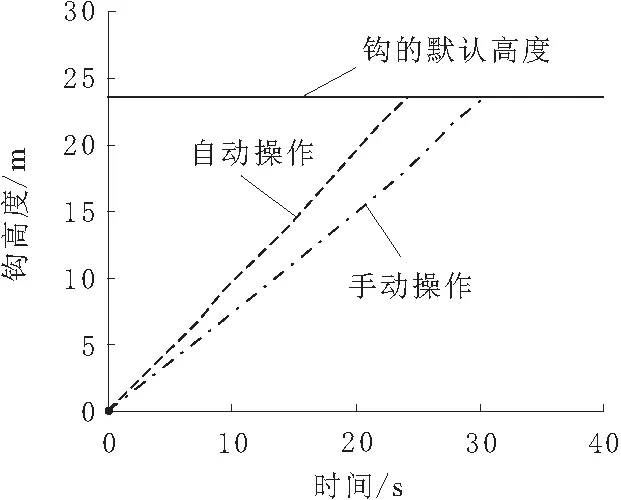
图9 移动块钩提升运动曲线
4.3 井架和司钻室监控系统的应用
司钻工作时间不超过4 h,井架定期检查不超过1个月。风速对钻井作业是安全的,司钻室的环境对司钻是舒适的。
将测试样本输入安全监控系统网络进行测试,得出诊断结果,表3为选取的部分测试样本、输出结果及钻井过程状态。
由表3可以看出,当输出端小于0.45时,系统的钻井过程状态正常,没有发生卡钻事故,可继续钻进。当输出端高于0.65时,存在卡钻事故,此时应立即报警并显示故障类型,并通知停止,同时进行维修处理。当输出端在0.45和0.65之间时,可能会发生卡钻事故,此时也要给出报警及显示故障预测类型,并根据故障类型调节钻井过程的相关参数。从试验结果可以看出,所设计的钻机提升安全监控系统具有一般性,能够从各个方面反映设备的运行状态,且准确度和可靠性较高。

表3 部分测试样本、输出结果及钻井过程状态
5 结束语
建立了一个安全监控系统,以提供用于钻井安全的实时参数。整个系统可以提高钻井的安全性和工作效率,并已成功应用于油田中。所提出的钻机提升安全监控系统对顶驱、移动块钩、井架、司钻室等参数进行采集和控制,并成功应用于钻井作业现场。自主开发了基于力控的软件系统RSLogic5000软件。该软件可以实时显示各部分参数,并实现报警功能,生成报告,绘制相关参数。收集的参数用于确定顶驱的工作状态,并及时发出警告进行检修,以免发生钻井安全事故。自动控制移动块钩移动到默认位置比手动控制更高效、更安全。每次自动控制行程,块钩可节省5~10 s。工作疲劳提醒司钻和井架检查定期提醒,可尽可能减少安全事故。系统每连续工作4 h向司钻发送一次工作疲劳报警信号,每个月发送一次井架检查信号。