乘用车高级驾驶辅助系统节油技术发展现状
2020-05-08钱国刚方茂东
钱国刚,闫 祯,李 春,汪 洋,方茂东,夏 伟
(1.中国汽车技术研究中心有限公司,天津 300300;2.索恩格汽车部件(中国)有限公司,湖南 长沙 410129)
0 引 言
高级驾驶辅助系统(Advanced Driver-Assistance System,ADAS)与互联自动驾驶车辆(Connected and Autonomous Vehicles,CAV)可以减少驾驶劳累及交通事故发生,达到节能省油目的。近年来,ADAS和CAV发展迅速[1],在能源效率方面也有所侧重。ADAS在2001年5月由欧洲成立的高级驾驶辅助系统接口规范联盟(Advanced Driver-Assistance System Interface Specifications Forum,ADASIS Forum)提出;2012年发布了第2版标准说明,阐释了数据精简性、可扩展性、协议测试软件模块配套等优点,得到推广应用;当前为第3版,依托车载以太网传输数据。
美国在ADAS方面的先期探索项目包括UMTRI(University of Michigan Transportation Research Institute,美国密歇根大学交通研究所)和安娜堡市在2011年的Safety Pilot Model Deployment[2]和UMTRI等3家机构在2015年的能耗效率研究[3]。
1 欧盟的研究和举措
欧盟在ADAS/CAV方面的科研项目和法规包括eCoMove、Eco-innovation,Horizon 2020 L3 Pilot等,以及中远期Horizon Europe。
1.1 欧盟2014年之前的研究
面向油耗最优的行驶控制,欧盟32家单位在2010年组成联盟运作了eCoMove项目[4],如图1所示。“V2C”表示“从车辆发送到交通管理中心”,“V2I”表示“从车辆发送到基础设施”,“V2V”表示“从车辆发送到车辆”。

图1 eCoMove系统信息流示意图
eCoMove分析了增加油耗的典型因素,包括拥堵、路线非最优、车-路红灯信息欠透明、激烈驾驶等,需借助信息流帮助驾驶员达成更优的路线选择和更节油的行驶。节油策略包括交通灯控制优化、不当驾驶习惯纠正、导航、停车导引、高速公路管理优化等。节油能力可以达到4%~25%,在道路交通较饱满时可达到12%。其中定义了生态平台(eco Horizon),如图2所示,在信息流、地图、导航、协作平台、状况模型、策略模型、人机界面等方面引入了生态视角。
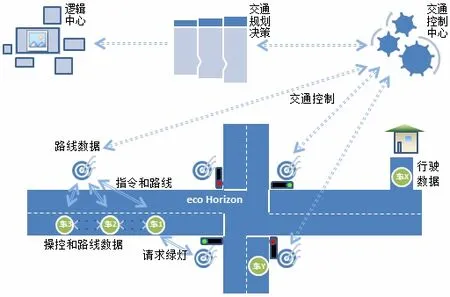
图2 生态平台(eco Horizon)运行机理
普及V2X(从车辆发送到外界)技术是eCoMove应用的前提,生态平台适当地延时绿灯来放行车辆或车队,提高总体通行效率。I2V(从外部设施发送到车辆)信息流赋予了交通控制更多灵活性,通过预先获悉交通灯的切换过程、邻近车辆速度和车道信息,车辆计算给出建议车速。驾驶员对系统的熟悉、信任和遵行程度也会影响节油效果。
1.2 欧盟2014年后的研究——Horizon
1.2.1 AdaptiVe项目
AdaptiVe辨析了驾驶员的需求、欧盟立法环境、测试评价,并定义了自动驾驶Level1~4。
1.2.2 MAVEN项目在V2X的新进展
MAVEN(Managing Automated Vehicles Enhances Network,自动驾驶车辆增强运行网络)从I2V(Infrastructure to Vehicle,从基础设施发送到车辆)单向沟通升级为两者间双向互动。借助网络和卫星传输技术以及本地动态地图LDM(Local Dynamic Map,本地动态地图),使CAV车辆与广泛基础设施系统可靠地交互,特别是在已信号化的交叉路口和拥有狭窄通道的城区,达到CACC(Cooperative Adaptive Cruise Control,协调自适应巡航控制)的目的。
结合V2I(从车辆发送到外部设施)和V2V(从车辆发送到车辆),MAVEN用模型模拟了GLOSA(Green Light Optimal Speed Advisory,绿灯优化推荐速度)技术。模型中嵌入了EAD(Eco-Autonomous Driving,生态自动驾驶)组件,减少了车辆走走停停的动作和急加减速。在EPA(Environmental Protection Agency,美国环保局)5循环工况下节油3%,在Austin循环下节油6.55%。Austin循环是基于Austin市2006年的车速路谱库编制而成,包括市区、市郊两部分[5]。
德克萨斯大学Austin分校采用二次方样条数据插值(spline)运算来模拟生态自动驾驶。短行程被转换时保持里程不变,以对应实际应用[6-7]。
1.2.3 L3 Pilot——L3级功能大规模试用
L3 Pilot项目承继了AdaptiVe研究成果,进一步关注自动行驶车辆如何有效地融入欧洲的交通基础设施[8]。项目调用了36家单位、100辆自动驾驶汽车、1 000名驾驶员,在欧洲11个国家开展,2017~2021年运作L3级功能大规模试用,并对一些L4 级功能进行评估,0.47亿欧元资金中有77%来自欧盟。L3 Pilot开发出实践准则,阐述了设计、开发自动驾驶功能的典型过程,包括检查清单、功能安全的确认操作方法等。
1.2.4 Horizon 的下一阶段
欧盟委员会2018年6月发布平台欧洲计划(Horizon Europe),提出2021~2027年的研究与创新蓝图,有超1/6的资金投入在气候、能源与交通方面。
1.3 欧盟生态创新技术Eco-innovation
同时满足7个条件的技术可以被认定为生态创新[9],条件有创新性、基础性(乘员舒适方面的除外)、可验证性、可计量性、在传统测试方法里未体现或未充分体现CO2削减能力、普及率小于3%、以及未被法规(EU)No 725/2011的第2(1)条所包括。欧盟已批准了26项,并给予了CO2排放减计,其中Bosch公司的两项涉及ADAS[10]1,[11]1。
2 美国的研究和举措
NEXTCAR(Next-Generation Energy Technologies for Connected and Automated on Road Vehicles,CAV次世代能源技术)[12]1,为美国ARPA-E的7个专题之一,在2016/2017财年有10余个子项获得合计0.35亿美元资金。
NEXTCAR项目在2019年有多篇SAE论文:General Motors 侧重车辆和交通场景仿真[13],PSU(Pennsylvania State University,宾夕法尼亚州立大学)辨析了重型车的列队跟驰兼顾发动机冷却系统的冷却风需求[14]1,MTU(Michigan Technology University,密歇根理工大学)开展了车辆及循环工况的仿真及测试[15]1,SwRI(Southwest Research Institute,西南研究院)探索实践了台架测试方法[16]1,OSU(Ohio State Universiy,俄亥俄州立大学)关注各节油技术潜能[17]。
2018年OSU还发布了空挡滑行的性能提升[18]1和预测性巡航控制的非线性仿真[19]1研究成果。CSU(Colorado State University,科罗拉多州立大学)改装2010款Prius,研究了基于V2V的车速预测改善HEV燃油经济性[20]1、以ADAS改善车辆燃油经济性[21],以及以控制来提高燃油经济性的预测实现[22]。
3 节油潜力分析
3.1 列队跟驰和交叉路口信号灯优化
车队列队时各车间距拉近,跟驰车辆的风阻得以减小,然而不同机构对商用车列队跟驰的节油效果预期有较大出入。PSU认为在兼顾车辆发动机热管理所需冷却风量的前提下[14]8,列队跟驰技术在时长约2.4 h的Composite Highway循环里节油率为2.5%。剑桥大学研究[23]则提出更乐观的节油预期值7%。
列队跟驰车队有更多机会被安排为绿灯放行。MAVEN项目以SUMO软件模拟乘用车市区行驶,为模拟列队跟驰车辆绿波专门开发了Simpa插件。
CACC(Cooperative Adaptive Cruise Control,协调自适应巡航控制)在保证及时到达目标地点的前提下,协调交通控制和车辆内部系统,促使车辆的动力系统尽可能多地工作在高效率范围。其中进行车速平滑的方法有得克萨斯大学Austin分校的spline smooth方法和SwRI的CAV-PT方法等,后者使2017款PHEV Prius Prime在US06循环下节油2%[16]6。
在市中心,相当比例的燃油耗费在寻找空车位的游荡和泊车入位时揉车过程,MIT曾测算这一比例为30%,ADAS的泊车导引和主动泊车技术可有效减少浪费。
3.2 道路坡度利用
道路坡度对应着势能,可以对其加以利用。Bosch公司在2013年获批了生态创新项目基于导航的HEV SOC预调节技术[10]3。其中CO2排放值减计额按式(1)计算,测试需采用能够模拟坡度阻力的转鼓测试系统。在测量生态创新的油耗时,转鼓按照图3所示实时车速以及道路坡度曲线对车辆施加阻力负荷,外部存储设备实时地向车辆GPS信息入口发送模拟GPS数据和坡度数据流,展示ADAS操控车辆的状况。

式中:BMC为基准车辆在测试规程下取得的袋采总油耗值;EMC为生态创新车辆在调整了车速曲线测试中袋采总油耗值;UF为利用系数,取值0.15。
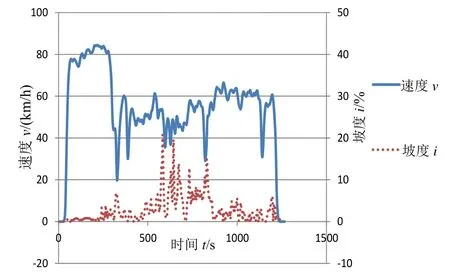
图3 基于导航的HEV SOC预调节测试的车速和坡度
空调系统可以设置在车辆到达坡顶之前加强制冷,进一步降低乘员舱温度,避免随后的下坡过程中出于制冷目的而运转发动机。OSU采取了坡度信息处理的先进算法ANLMPC(Adaptive Nonlinear Model Predictive Controller,主动非线性仿真预测控制),与自适应巡航技术相比,某典型测试道路的换挡频次从90次削减至38次,进一步节油4.33%[19]12。
3.3 PHEV的SOC管理
MTU采用PHEV Volt Ⅱ进行Run5与Run6对比试验见表1,两次试验在同一段38.3 km的道路上开展,最高车速约90 km/h,主要分布在开始和结束时段,中间时段车速为0~50 k m/h。Run5的SOC初始比Run6下多储能1.84 k Wh,但Run6总耗能值比Run5仅多0.84 kWh[15]12,由此可以得出,将基于ADAS/CAV的预见性节油驾驶与减轻车重相结合,可以使PHEV少耗能1 kWh。
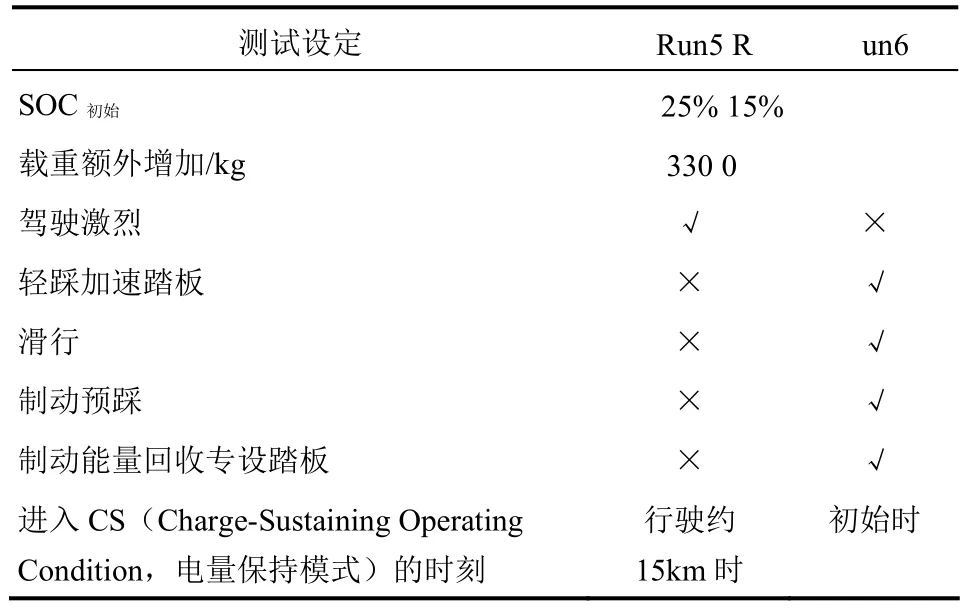
表1 PHEV Volt Ⅱ的Run5与Run6试验
结合V2V通信和具有先前驾驶记录的驾驶循环数据库进行速度预测,可以优化HEV的能源管理。CSU(California State University,加利福尼亚州立大学)研究[20]7认为在兼顾预测时段区间和保真度后,非插电式2010款Prius车可最多节油6%。
清华大学将基于多种交通信息设计工况自适应能量管理策略应用在PHEV客车上,发现比CDCS(先电量消耗模式Charge-Deplementing Operating Condition,而在电量降至“平衡状态”时转为电量保持模式Charge-Sustaining Operating Condition)策略可以节油最多15%[24],两种策略下SOC曲线对比如图4所示。
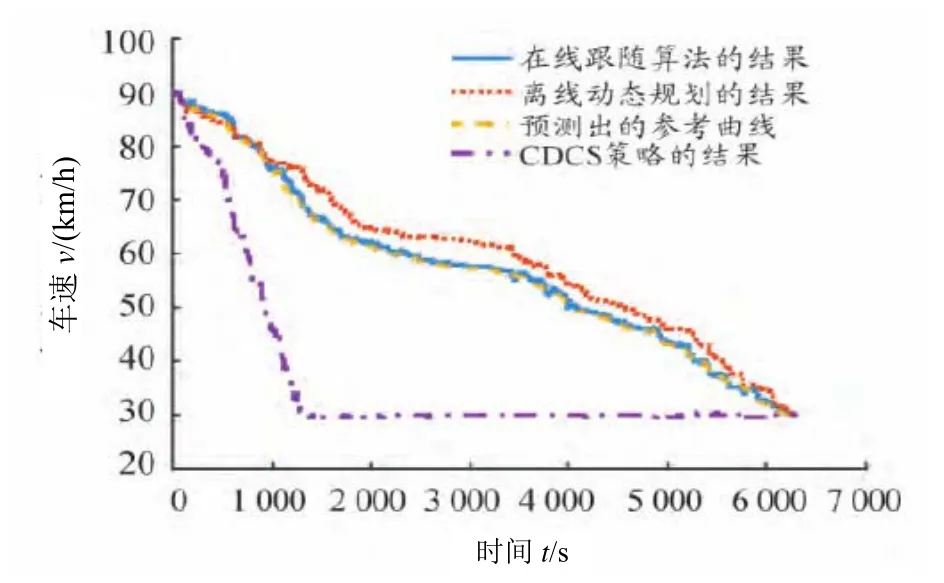
图4 PHEV客车在两种策略下的SOC曲线
3.4 48V技术及αDSF技术
车辆节油能力取决于其部件控制的综合效果。线控各电气部件作动时,48 V电气架构拥有优于12 V系统的功率性能和响应。ADAS/CAV提供预约性的控制信号,使电气部件状态提前调整就绪。48 V支持的低速电爬行、电动增压加速、制动能量回收、悬架主动降低、进气隔栅主动调节、滑行等技术可获得更充分的作动时机。
αDSF(α Dynamic Skip Fire,智能化动态跳跃点火技术)停缸技术使每个气缸独立受控。例如4缸机,αDSF可以实时地安排4个气缸都工作,或者0~3个气缸工作[25];mDSF(miller cycle Dynamic Skip Fire,米勒循环动态跳跃点火技术)使各气缸新增了一项低功率工况。在mDSF 4缸发动机曲轴转过720°CA的过程里,各气缸做功状况排列组合选项个数达81。αDSF借助雷达等感知设备以及X2V手段可以实时获知全面信息,包括车辆位置、交通流、坡度、地形、障碍物、交通灯和驾驶员加速诉求信息等,从而计算出实时的和预期的发动机输出扭矩指令值,进而生成兼顾燃油经济性的气缸工作状态命令。ADAS/CAV使DSF作动下的车速调整示意如图5所示,匀速工况增多。
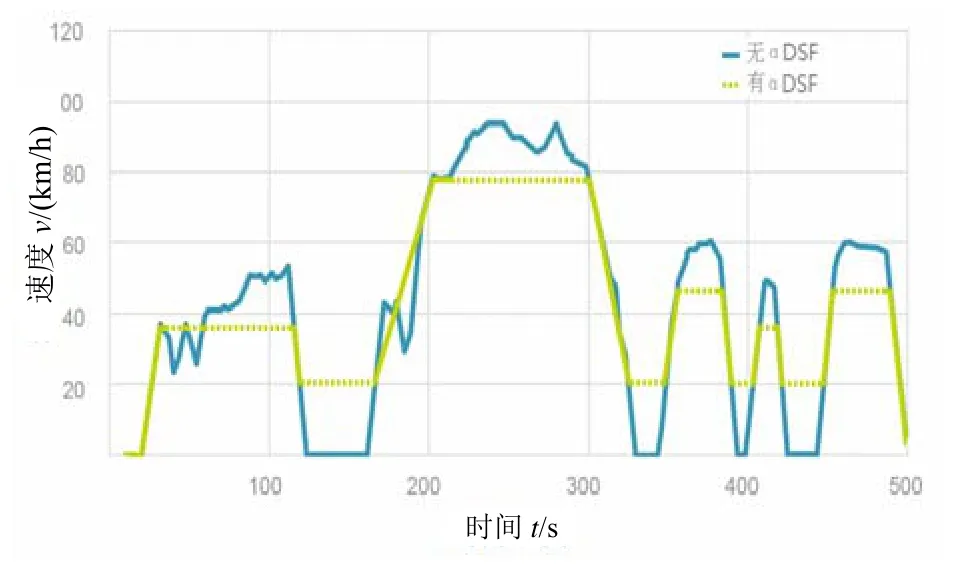
图5 无αDSF及有αDSF下的车速曲线
通过综合运用ADAS、DSF及48V技术,OSU与德尔福公司等在道路测试中达到了节油15%。
3.5 空挡滑行优化
断油带挡滑行、空挡怠速滑行和空挡熄火滑行都是节油的技术手段,其中空挡熄火滑行更节油,借助48 V电机回收制动能量并提供额外的制动力保障,奔驰某车型已可以不受制动系统过度损耗和制动欠及时充分等因素的制约,在某些缓减速时段达成发动机熄火滑行,该技术在脱离滑行模式重新加速时有动力迟滞的风险,可修改离合器控制来减轻迟滞,更有效的解决手段是依托ADAS/CAV改进作动时机。
2018年,由Bosch公司及欧、日、美、韩13家整车企业共同申请了发动机怠速滑行技术生态创新[11]3-11,行驶阻力免除了发动机泵气损失,达成节油。车辆在NEDC(New European Driving Cycle,新欧洲测试循环)循环测试里可按照图6所示的变更弧形曲线(mNEDC)行驶,其中m为modified的首字母,即对局部加以变更的NEDC曲线。额外节油量由公式(2)计算得出,式(2)中利用系数UF值取决于车辆变速器类型及ADAS等因素。与手动挡相比,自动挡变速器扩充了车辆行驶的适合滑行范围,则利用系数UFMC自动挡大于UFMC手动挡,UFMC自动挡取值0.52,UFMC手动挡取值0.48。类似地,交通灯信息、周边交通参与者信息和道路坡度等信息也有助于提升UF。

式中:c为转化系数,取值0.96;BTAhot为基准车辆在型式试验(NEDC)热启动下的袋采油耗值;EMC为生态创新车辆在调整了车速曲线测试中的袋采油耗值。
图6 Bosch公司滑行技术的mNEDC行驶曲线(空挡为弧形曲线对应时段)
空挡怠速滑行实施效果的主要不利因素是车前道路交通不够宽松,使应用路程过短,以至于车辆动量的利用程度不及断油带挡滑行。在缓减速过程里,两种技术下的瞬态喷油相对高低随着时间变化如图7所示。假设车辆从60 km/h减速,最初两者都不喷油;随后,空挡怠速滑行下发动机转速较早跌落至发动机唤醒转速阈值RPMw(Revolutions Per Minute,转每分),在tN-I-C时刻发动机开始怠速喷油;断油带挡滑行下的反拖作用使发动机转速跌落慢,降至RPMw的时刻为tD-F-C。若车辆缓减速过程截止在0~tN-I-C,两者节油基本相同;若截止在tN-I-C~tD-F-C,则断油带挡滑行更节油,因为此时发动机无怠速喷油;若在tD-F-C之后很快截止,仍是断油带挡滑行更节油;若在tD-F-C许久之后截止(图7中“后续时间”),滑行距离增长的收益和怠速喷油率值较小的综合收益总体上将大于断油带挡滑行下的油耗节省,空挡怠速滑行更节油。采用何种滑行策略应因时施策,随交通状况而定。OSU研究[18]2-5提出了基于ADAS/CAV技术的NCC(Neutral Coasting Control,空挡滑行控制)管理策略,根据车辆前方驾驶状况的良好态势感知信息作决策,用于识别更好的滑行机会,摒弃那些被预测为驾驶员很快作出干预行动、即使滑行也会因驾驶员的重新加速或制动而终止的伪空挡怠速滑行时机。NCC策略在市区及市郊均可节油约3%。
再者,配备了储冷蒸发器的48V技术车辆可以使35℃环境NEDC循环下的滑行过程得到进一步延展,促成节油5%[26]。
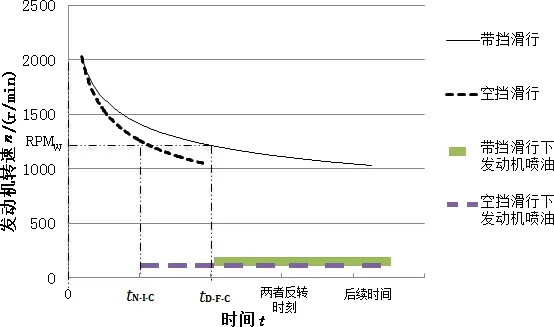
图7 带挡滑行与空挡滑行下发动机转速及瞬态喷油情况
3.6 其他相关因素
ADAS/CAV新增的各部件在运行时消耗电能,相当于间接耗油。中心式计算架构的CAV在基于相同且完整的数据集开展运算以作决策时,处理数据的功率需求可以降低一个数量级。电耗过高问题的解决手段是针对智能驾驶车辆采用特种集成硬件芯片。
4 总 结
借助ADAS/CAV,车辆从“临场知觉”变为“先知先觉”乃至“互通知觉”,欧盟、美国均有诸多课题在研究其节油潜力。当智能、互联、电气操控三者达到有机协同时,在V2X及X2V支持下,车辆被道路设施及友邻车辆“行以方便”而顺畅通行的机会增多。这其中节油潜力也来自更广泛的信息指引,包括互联化提供的坡度地形等当地大数据、车辆部件系统的智能化安排、预调整等。
