基于状态机的MMC换流阀快速建模方法与仿真实现
2020-05-07任佳佳
任佳佳
(山西职业技术学院,山西 太原 030036)
0 引言
柔性直流输电是20世纪90年代开始发展的一种新型的高压直流输电技术,其主要特点是采用具有自关断能力的全控型电力电子器件构成的电压源变流器(voltage sourced converter,VSC),取代了常规直流输电中基于半控晶闸管器件的电流源变流器。在VSC-HVDC的建模中,基于半桥两电平,使用的半导体器件较少,采用详细的电力电子模型对仿真速度的影响较小,但是随着电力电子器件数目越来越多,已不能继续采用详细模型,在换流阀与直流断路器阀的建模方面,给阀的建模带来了挑战[1]。通常采用的模型有平均值模型和连续模型两类。
平均值模型(averaged value model,AVM),在换流器层面进行等值,分别形成交、直流侧的独立模型,再通过功率守恒将交、直流侧模型联系起来。AVM不包含具体的子模块模型,只体现MMC的外部特性,仿真效率非常高,适合于电网级研究。但是,AVM这种交、直流侧单独建模的方式,破坏了交流侧和直流侧的真实电路结构,决定了它无法准确地模拟MMC直流故障特性、闭锁等重要的暂态行为,这是AVM的主要问题。通过很多附加电路改进了AVM的交直流侧电路结构,使AVM能够体现MMC在直流故障条件下的故障特性以及换流器闭锁功能[2,3]。但是,改进后的AVM只是针对半桥式MMC这种简单的拓扑结构,对于众多的内部结构更为复杂的MMC改进拓扑,想要建立相应的AVM模型就会比较困难。
连续模型(continuous model,CM),在桥臂层面进行等值,利用可控电压源等效桥臂的子模块电容串,不包含子模块模型,对桥臂内部子模块进行平均化处理后,动态计算可控电压源,避免了节点导纳矩阵的动态求解。CM不但具有较高的仿真效率,而且能够准确地体现换流器解/闭锁状态、各类交直流故障等暂态行为。此外,与AVM不同,CM保留了桥臂的结构,只是对桥臂内子模块进行归一化处理。当子模块结构发生变化时,桥臂等值电路的建立也比较简单直观,CM具有便捷地拓展建立各种MMC改进拓扑仿真模型的潜质。
为了表征模型半导体功率器件的开关过程,准确地仿真换流阀内部的特征,本文提出一种基于状态机的MMC-HVDC的快速建模方法,根据子模块的状态,将模块分为子模块投入状态、子模块将投入状态,子模块旁路状态和子模块将被旁路四种状态。根据需要改变的状态,来改变4种类型中的子模块数量,每种状态都是基于详细模型来实现。
1 模块化多电平与子模块工作状态
1.1 模块化多电平
模块化多电平(modular multilevel converter, MMC)的电路拓扑如图1所示,其用到的元器件数量和电平数成正比,是由大量内部结构相同的低电压等级的半桥子模块(sub-module,SM)串联叠加而成。由于MMC自身固有的“模块化”构造,可以方便地得到较高电平的多电平电压输出,波形品质较为出色。理想情况下,当输出电平增大时,即会逼近标准的正弦波,因此MMC可以采用较低的开关频率实现控制目的。MMC的主要技术优势如下:
1) 模块化和可扩展性可以满足任何电压等级的要求;
2) 优越的谐波特性,能够在省去低频变压器和无源滤波装置的情况下运行,实现低谐波含量的高电压输出,并且不需要增加变换器的开关频率;
3) 效率高,单个开关器件的开关频率较低,等效开关频率高,以高效率输出了较高的电能质量;
4) 具有较强的故障保护能力,可以通过子模块的冗余设计提升MMC系统的故障穿越能力。
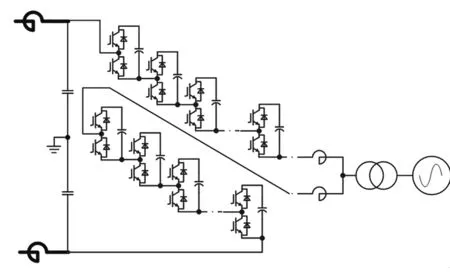
图1 Siemens模块化多电平(MMC)电路拓扑
1.2 子模块工作模式分析
子模块由电容和两个功率模块组成,根据开关状态与电流方向,子模块有三种工作模式,如图2所示。
两个IGBT均闭锁的模式下,根据外部电压方向,实现对子模块的充电,没有放电过程。当VT1开通、VT2闭锁的模式下,子模块输出电压为电容电压,电流能够双向流动,分别对电容进行充放电;当VT2开通、VT1闭锁的模式下,子模块输出电压为零,电流能够双向流动,电容被旁路。

图2 子模块工作模式
2 基于状态机的模块化多电平的快速建模
2.1 基本原理
根据模块化电压源换流阀,由于涉及的子模块数量较多,采用详细模型建模将导致系统的节点导纳矩阵庞大、无法求解的问题,通常采用的有换流阀戴维南等值电路的方法,将换流阀等效为一个受控电压源与等效电阻串联的电路,实现与电气网络的接口。但是该方法忽略了开关器件的开关过程,不能实现阀体本身,如功率器件的开关等的暂态过程。为此,提出了基于状态机的MMC换流阀快速建模方法。
根据子模块状态,将换流阀表示为四种状态:子模块投入状态、子模块待投入状态、子模块待切除状态和子模块切除状态,每种状态用一个详细模块来实现。假如有N个子模块投入,M个子模块切除状态,则子模块投入状态为N-1个,子模块待切除状态为1个,子模块待切除状态为1个,子模块切除状态为M-1个。
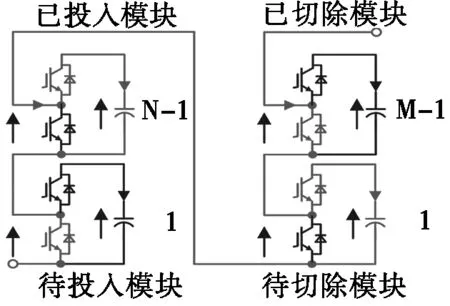
图3 换流阀四种状态
2.2 实施过程
根据当开关状态发生变化时,利用待投入或待切除状态的子模块来实现具体的变换过程,当需要投入一个子模块时,则将待投入子模块投入,也就是待投入模块变为投入模块,子模块投入状态为N-1个;在下一个时刻,将投入的子模块归入已投入模块,子模块投入状态为N个,恢复待投入子模块状态。
切除过程与此类似,如需要切除一个子模块时,则将待切除子模块切除,也就是待切除模块变为切除模块,子模块切除状态为M-1个;在下一个时刻,将切除的子模块归入已切除模块,子模块切除状态为M个,恢复待切除子模块状态。
综上可得,这样就能利用4个子模块,实现较多子模块的换流阀的仿真,且能够模拟实际换流阀内部的开关过程,兼具详细模型能够实现内部开关过程的优点和简化模型的仿真快速性的优点。
3 仿真分析与验证
直流电压±500kV,各换流站采用MMC拓扑结构,近期为四端柔直环网结构,容量分别为1500 MW、1500 MW、3000 MW、3000 MW,子模块为244个,对应的直流侧电容值分别为8μF、8μF、15μF、15μF。
通过电磁暂态仿真软件搭建了柔性质量输电电网模型,进行仿真分析,仿真得到的极输出电压如图4所示,从图4可以看出,变流器输出是带有偏置的电压(实际波形是带阶梯的方波,仿真中为了提高仿真速度,进行了简化)。

图4 极输出电压波形和直流线路电压波形
仿真得到极1上、下桥臂电流如图5所示,两者都含有直流电流,其含有的基波分量相反。
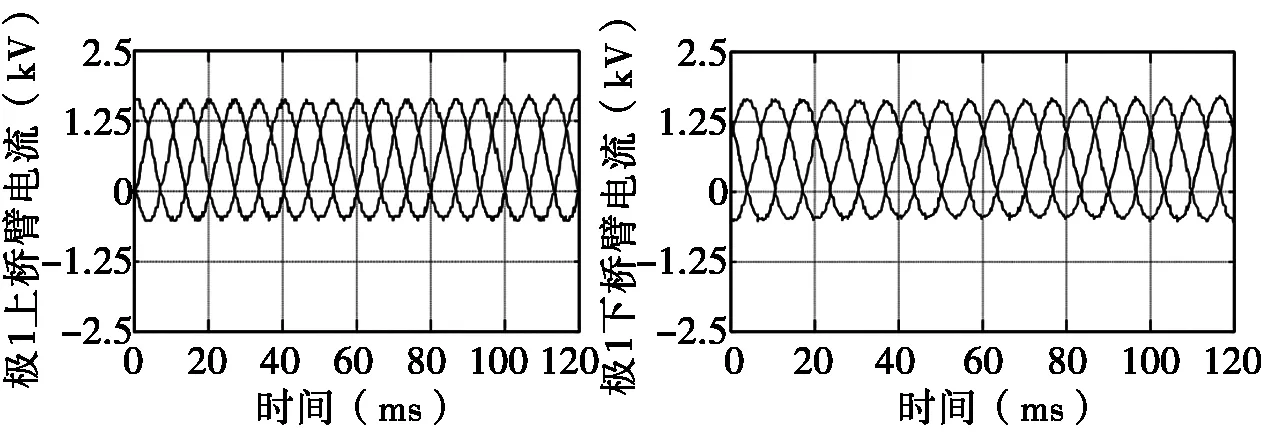
图5 仿真的桥臂电流
4 结论
针对模块化电压源换流阀的子模块数量较多,无法进行详细模型建模的问题,本文提出了基于状态机的MMC换流阀快速建模方法。根据子模块状态,将换流阀表示为四种状态,子模块投入状态、子模块待投入状态、子模块切除状态和子模待块切除状态,每种状态用一个详细模块来实现,通过待投入子模块实现子模块的投入,子模块待切除状态实现子模块的切除,并合理调整投入和切除子模块的数量,就实现了子模块电力电子阀的详细建模。通过电磁暂态仿真建模,验证了提出的快速建模方法,在保证精度的情况下,能够准确地仿真换流阀内部的特征。
