软式空中加油对接过程锥套运动情况
2020-05-07张志强郝毓雅
张志强, 任 伟, 郝毓雅
(中国飞行试验研究院,西安 710089)
空中加油技术在现代战争中具有:延伸飞机作战半径;增加飞机的任务载荷,提高任务效能;延长飞机留空时间,巩固战场制空权和信息权;实现快速机动,提高行动隐蔽性与突然性;实施及时补给,挽救生命财产和损失等至关重要的作用。按照加/受油装置的不同空中加油技术可以分为软式空中加油和硬式空中加油两种。软式空中加油的加油程序一般分为会合、对接、加油、解散4个阶段。对接过程是实施空中加油的关键,不仅关系到能否顺利进行空中加油,而且关系到空中安全,空中加油时发生的事故大多是在这一过程中[1]。
在软式空中加油中,对接最后阶段,受油机前行产生的弓形波会改变受油机周围的压力场,致使锥套不断远离受油探管。在弓形波效应影响下,飞行员的操作不仅仅是将受油探管瞄准锥套,对接成功与否更多地取决于飞行员对锥套运动轨迹的判断、操作技巧和经验。飞行员空中加油训练过程中大量的训练内容为熟悉弓形波效应特点,了解对接过程中锥套的运动情况,从而能够采取合理操作完成对接。通过数值模拟方法获得对接过程锥套的运动轨迹,分析其运动规律对指导飞行员完成对接操作具有重要作用[2-4]。
一般情况下将弓形波效应开始产生作用的位置为占位位置,开始产生较剧烈影响作用的位置为预对接位置。在软式空中加油对接过程中,当受油机经过预对接位置时,受油机机头会对锥套产生明显的扰动作用,致使锥套不断偏离初始位置。 在预对接位置,飞行员采用“脉动”法操纵油门杆,提高飞行速度,完成最后的对接,此过程飞行员几乎不做其他机动操纵, 因此在预对接位置,若受油机受油探管与锥套中心处于同一轴线,受弓形波效应的影响,对接过程的成功率将难以保证。
目前来说,多体相对运动的动态模拟一般采用动网格方法,但动网格技术对网格适应性和复杂构型的能力要求很高,在一些构型较为复杂的情况下难以实现,且计算效率相对很低。为顺利、高效地实现空中加油对接过程的动态模拟,拟采用重叠网格方法对软式空中加油对接过程进行数值模拟研究。重叠网格是将计算区域划分成多个独立子区域,各子区域网格随部件作刚性运动,流场信息在网格重叠部分通过插值进行传递。重叠网格即具有逻辑关系简单、计算技术成熟、效率高、黏性模拟能力强等优点,更弥补了动网格对复杂拓扑适应能力差、易重构失败的缺陷,极大地降低了网格生成的难度。近年来重叠网格技术快速发展,并不断地推陈出新,其应用也越来越广泛[5-8]。
针对弓形波效应对空中加油对接过程的影响,提出受油机受油探管与加油机锥套在预对接位置上以某一预定的起始相对位置进行对接的操作方法。通过分析受油探管与锥套以不同相对起始位置进行对接过程中,加油机锥套的运动情况,获得对接结束时锥套与探管在法向、侧向的相对位置偏移量,从而得到最佳的对接相对起始位置,提高空中加油对接成功率。
1 研究对象

图1 弓形波效应示意图Fig.1 Bow wave effect diagram
弓形波效应为空中加油对接过程受油机向前运动对锥套产生的偏移作用,如图1所示。为获得对接过程锥套的运动情况,采用基于重叠网格的动网格技术对空中加油过程进行数值模拟研究。整个计算域由受油机机头和加油机锥套两个部分组成。为了节省计算资源,设计了简化形式的机头-锥套组合体模型,如图2所示。锥套半径r=35 cm,自身质量为50 kg。实际空中加油过程中锥套与充满增压燃油的加油软管相连,加油软管会抑制锥套的运动,因此,在计算及分析过程中采用的锥套质量为150 kg。另外,为了简化计算,假定锥套可在任意方向平移,且不可旋转。
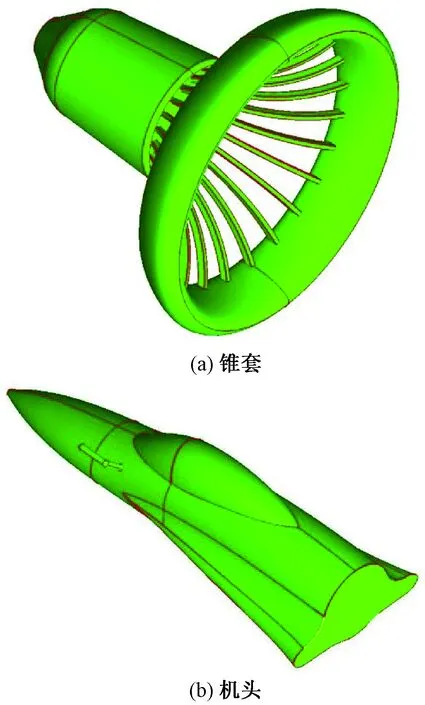
图2 机头-锥套模型Fig.2 Model of drogue and aircraft nose
2 数值模拟方法
2.1 数值模拟基础
数值模拟采用标准k-ε湍流模型对整个计算域进行三维求解,采用标准壁面函数求解近壁面区域的流动。离散格式为二阶迎风格式,选用Simplec的方法对整个离散方程进行非定常迭代计算,直至机头与锥套的相对位置不再发生改变。为了保证计算精度,计算时间步长为0.001 8 s,整个计算过程大约要经历1 000个时间步。
数值模拟中机头部分在计算过程中静止不动,锥套计算域可以在3个方向上移动,其中,在X方向,即轴向方向上以1.5 m/s的速度向机头运动,在其余两个方向上的运动速度为由上一时间步的计算结果确定。整个域的进出口均为远场条件,在进口处给定速度入口的远场条件,出口处给定均匀分布的平均静压作为远场出口。
在锥套动域与静止的机头计算域的交界处,采用重叠网格法构建锥套计算域与机头计算域之间的耦合关系,以保证不同域之间的流场在计算边界上的数据传递。如图3所示,背景网格落入前景网格物面内的点被标记为洞内点而不参与流场的计算。背景网格中与洞内点相邻的点为洞边界点,这些点通过插值接受从前景网格传递的流场信息。相应的,前景网格的外边界点也通过插值接受从背景网格传递的流场信息。重叠网格的生成包含两个主要步骤:挖洞与插值。挖洞是指在流场计算前从网格中屏蔽掉一些不必要或者无实际意义的部分(如物体壁面内部),具体而言,是在需要屏蔽的区域周围设定挖洞面,然后将落入挖洞面内的网格点标识出来,并在计算过程中予以舍弃。在构建好挖洞关系后,洞边界即确定下来。而后需要确定的就是网格之间的插值关系,其中包括两个步骤,确定插值贡献单元与插值公式。任意变量f由相应的六面体贡献单元采用trilinear方法插值获得式(1),其中di、dj、dk为[0,1]间的插值权系数[9-11]。
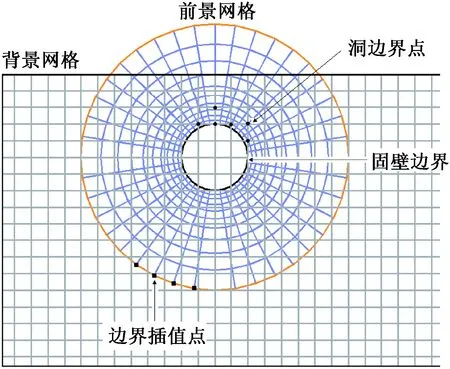
图3 重叠网格示意图Fig.3 Overset grids diagram
f=f1+(-f1+f2)di+(-f1+f4)dj+
(-f1+f5)dj+(f1-f2-f4+f3)didj+
(f1-f2-f5+f6)didk+(f1-f4-f5+f8)djdk+
(-f1+f2-f3+f4+f5-f6+f7-f8)didjdk
(1)
2.2 机头-锥套组合体重叠网格划分
机头-锥套组合体由机头和锥套两部分组成,分别对机头和锥套进行子网格划分,其中机头网格为背景网格、锥套网格为前景网格,两套网格生成完毕后进行组装,形成所需的重叠网格计算域,如图4所示,其中图4(a)为锥套网格,图4(b)为组装后的重叠网格。为了在保证计算精度的前提下,尽量减少计算时间,提高计算效率,在进行数值模拟之前,共划分了网格数分别为137万、221万、306万、426万、530万、650万、800万的7套网格。计算结果表明,网格数为530万、650万、800万的3套网格在阻力损失、典型截面的速度和压力结果的相对误差都在1%以内,因此,综合考虑计算精度与计算效率,在后续计算中均在530万网格数的网格上进行。
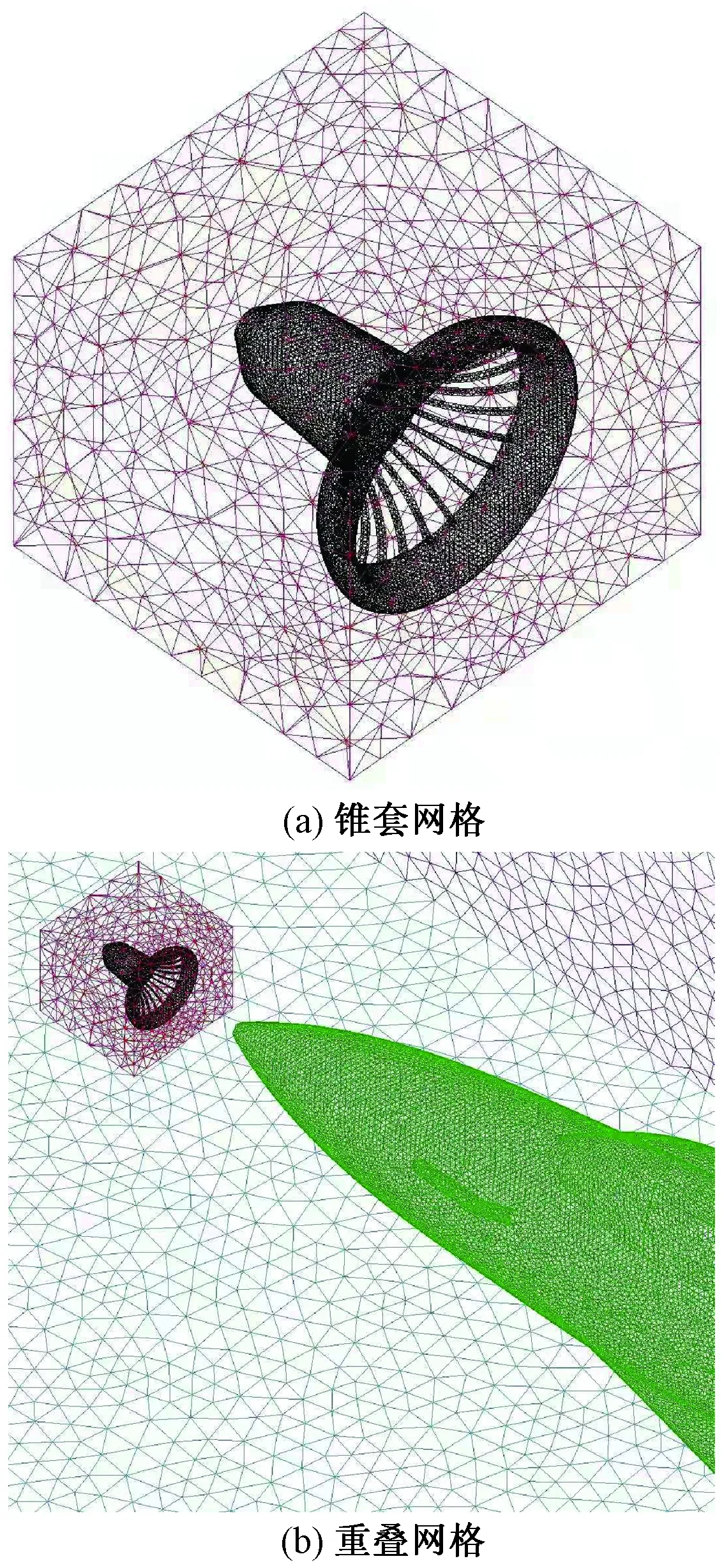
图4 机头-锥套组合体的重叠网格划分Fig.4 Overset grids of drogue and aircraft nose
为了获得准确的受油探管与锥套间相对起始位置,提高空中加油对接成功率,采用逐步逼近的方法对一系列拥有不同相对起始位置的对接过程进行了非定常数值模拟研究。整个逼近过程可以简单总结如下:开始时,对受油图探管与锥套处于同一轴线的相对起始位置的对接过程进行数值模拟,获得对接结束是锥套的位移情况。在此基础之上,根据第一步计算得到的锥套位移情况,在受油探管轴线四周选取多个围绕轴线的点作为第二步数值计算中受油探管的起始位置,采用同样的数值方法在这些起始位置上进行数值模拟,并选出对接过程完成后,受油探管与锥套最接近的相对起始位置点。然后以该点为原始点,重复第二步操作,直至获得能够成功对接的锥套与受油探管的相对起始位置范围。
3 计算结果与分析
根据前文所述的逼近方法,共模拟了受油探管与锥套以21种不同相对位置进行对接时,锥套的运动情况。动态模拟中受油机机头位置固定,锥套位置不断变化。受油探管与锥套的纵向相对位置一般为受油机机头弓形波效应产生明显作用的位置,通常为飞行员编队训练中获得,因此数值计算中纵向相对位置固定为2.7 m,仅调整受油锥套的法向、侧向位置,如表1、表2所示。
2.2 不同性别、年龄段的椎体骨折阳性率比较 结果(表1)表明:男性总体椎体骨折阳性率为25.3%、女性为13.8%,差异有统计学意义(P<0.001)。<65岁的各年龄段中,男性椎体骨折阳性率均高于女性,差异均有统计学意义(P<0.001)。
空中加油对接过程动态模拟结束时如锥套中心与受油探管轴线的法向、侧向距离均小于锥套半径r=35 cm时认为对接成功,否则认为对接失败。为初步获得受油机机头弓形波效应对锥套运动轨迹的影响,首先进行受油探管与锥套在同一轴线上的动态模拟(算例1)。
3.1 算例1
对接过程中锥套在不同时刻法向、侧向偏移情况如图5、图6所示,可以看出,对接过程中锥套向上、向外发生偏移,这与美国宇航局提供的飞行试验数据,对接过程中,锥套受弓形波效应的影响具有向上向外的运动趋势相一致[12]。对接过程中锥套的侧向偏移量大于法向,这主要是受油机机头几何形状影响所致。对接结束时锥套法向偏移量为23.47 cm、侧向偏移量为54.09 cm,锥套侧向偏移距离大于锥套半径,对接失败。
为进一步获得受油探管与锥套在不同相对位置进行对接时,锥套的偏移情况,参照算例1的计算结果:锥套侧向偏移量大于法向,选取该算例中锥套位置正中心左上、左下、右上等8个相对位置(算例2~算例9)进行对接过程动态模拟。算例2~算例9的具体相对位置关系如图7所示,坐标原点为受油探管最前端,Y轴为法向,Z轴为侧向。

图5 算例1偏移示意图Fig.5 Movement of drogue in case 1
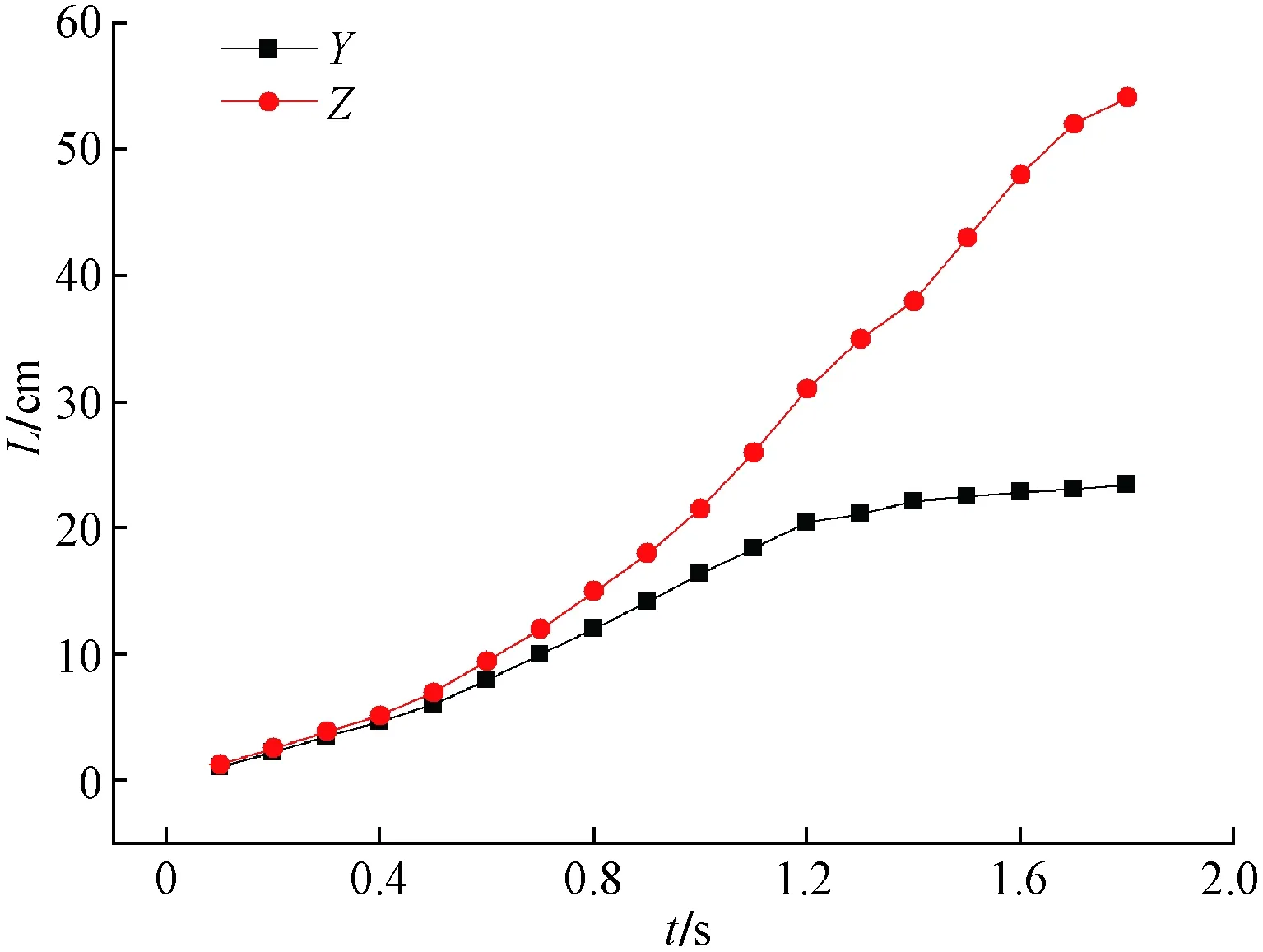
图6 算例1偏移量Fig.6 Offsets of case 1
3.2 算例2~算例9
算例2~算例9起始位置示意图如图7所示。
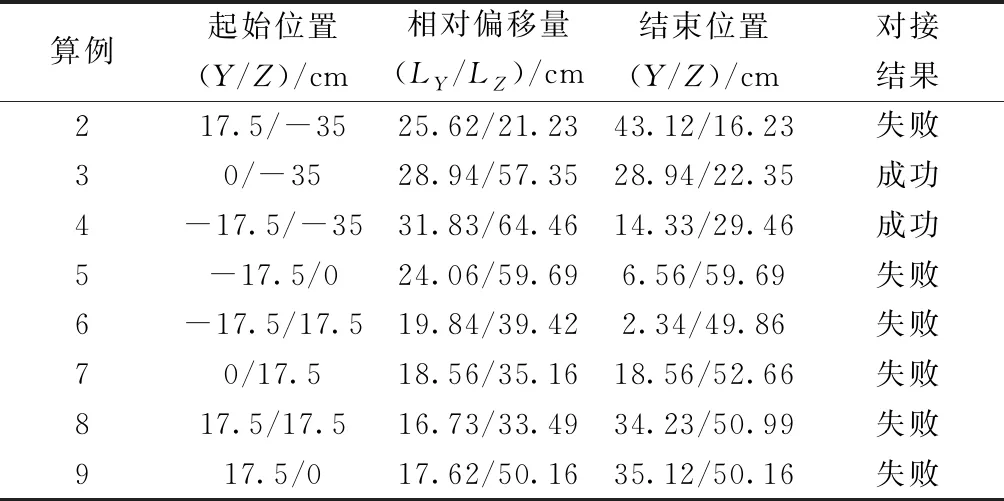
表1 算例2~算例9对接结果
3.3 算例10~算例21
表2所示为算例10~算例21的计算结果,可以看出算例10~算例21均对接成功,但算例10、算例14、算例18~算例21的对接结束位置已达到锥套的边缘。锥套的法向、侧向结束位置,随对接开始时锥套法向位置Y和侧向位置Z的减小而减小。从所有对接成功算例的计算结果可以看出对接开始时锥套法向位置Y由0 cm减小到-70 cm时,结束位置Y由28.94 cm减小到-30.74 cm。对接开始时锥套侧向位置Z由-35 cm减小到-105 cm时,结束位置Z由29.46 cm减小到-28.02 cm。除去对接结束位置已达到锥套边缘的算例。当对接开始时锥套法向位置Y在-35~-52.5 cm,且侧向位置Z在-52.5~-87.5 cm时,受油探管能较好地落在探管的中心区域。因此最佳对接相对位置为逆航向视角,锥套中心位于受油探管轴线的左下方区域,锥套中心与探管轴线法向相距为r~1.5r,侧向相距为1.5r~2.5r区域内。
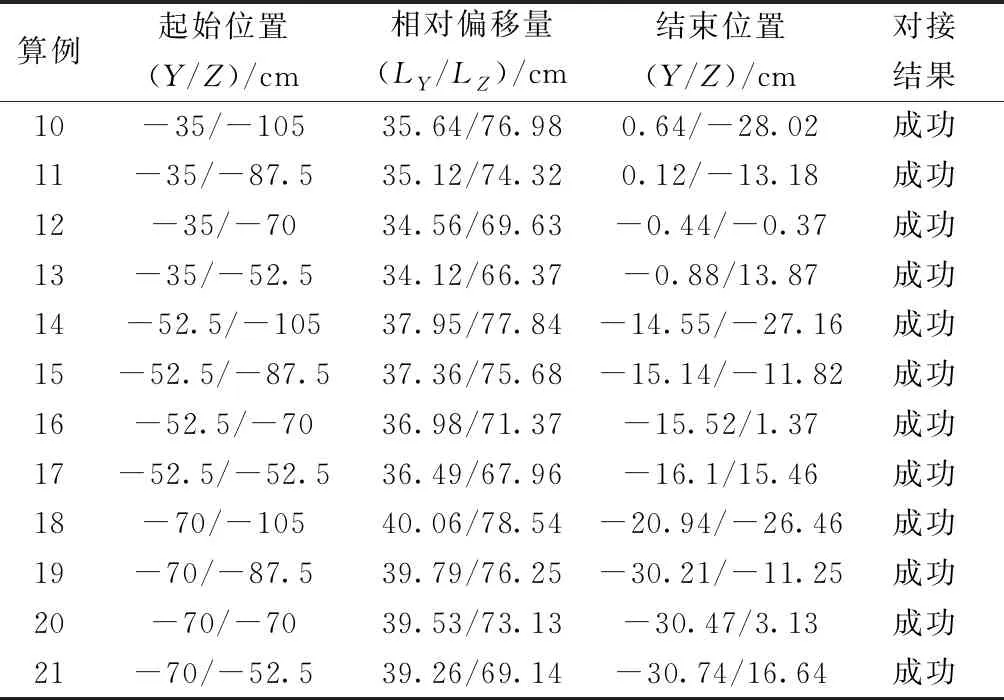
表2 算例10~算例21对接结果Table 2 Result of case 10~case 21
4 结论
采用基于重叠网格法的数值模拟方法对软式空中加油过程进行了非定常数值模拟研究。为了获得能够对接成功的受油探管与锥套间相对起始位置范围,采用逐步逼近的方法对一系列拥有不同相对起始位置的对接过程进行了数值模拟研究,结论如下。
(1)对接过程中锥套具有向上向外的运动趋势;对接结束时锥套的法向、侧向相对偏移量,随对接开始时锥套位置Y、Z的增大而减小。
(2)最佳对接相对位置为逆航向视角,锥套中心位于受油探管轴线的左下方区域,锥套中心与探管轴线法向相距为r~1.5r,侧向相距为1.5r~2.5r的区域内。