环形立交匝道汽车横向加速度特征实车测试研究
2020-05-07张晓波
张晓波, 林 伟
(1.中铁第四勘察设计院集团有限公司,重庆 400063;2.重庆市轨道交通集团有限责任公司,重庆 401120)
对于高速公路和快速路,匝道以及邻近匝道区段一直是事故高发区域。环形匝道主要用于苜蓿叶形互通立交和喇叭口互通立交的左转交通转换,是城市立交和公路立交最常使用的匝道形式之一。环形匝道由于技术指标较低,在通行能力、安全性、舒适性等方面均是瓶颈和薄弱点。
环形匝道是一类典型的小半径、大转角急弯路段。对于曲线路段而言,横向加速度是描述弯道运行状态和汽车行驶稳定性、舒适性的主要指标。现有关于互通立交的研究主要集中在互通出入口的车辆运行状态和驾驶行为,包括车辆在立交出口的轨迹特性以及驾驶人性别、驾驶经验和职业对换道轨迹的影响[1];使用链式雷达追踪互通立交入口的车辆行驶速度,建立合流速度、合流长度、加速度模型以及右侧车道速度模型[2];基于高空视频图像分析的立交匝道连续行驶速度特性[3];螺旋立交匝道和螺旋桥的速度模式[4];立交出入口和交织段的驾驶行为[5-6];基于智能手机APP的立交匝道几何参数估计与临界行驶速度预警[7]等。这些研究都未涉及立交匝道的横向加速度。而与横向加速度或是横向力系数相关的研究有:曲线路段上不同驾驶风格驾驶人的横向加速度差异性以及横向加速度在高速行驶时的衰减性[8],山区道路条件下横向加速度与弯道半径之间的相关性[9-10],横向加速度与速度之间的相关性[10-11];基于加速度数据的山区低等级公路和高速公路的行驶舒适性分析,以及横向加速度阈值修正[12-13];基于横向加速度变化率的超高过渡方式分析和车道数变化段指标研究[14-15];换道时的横向加速度特性[16];基于横向加速度的公路线形安全性评价[17-18]。这些研究都是面向公路主线,没有涉及立交匝道。
综上,通过现有的研究无法了解到互通立交匝道尤其是环形匝道的横向加速度特征,难以评判环形立交匝道的行驶舒适性和安全性。为此,开展互通立交实车驾驶实验,采集自然驾驶状态下横向加速度数据,明确环形匝道横向加速度的幅值特征和变化模式。
1 试验方案
1.1 立交对象
在重庆辖域内选择4座苜蓿叶形互通立交作为试验对象,其中主城区3座,为人和立交、北环立交和东环立交,均是完全苜蓿叶形互通立体交叉,其中北环立交连接的2条高速道路为斜交,交叉角度为64°(锐角);涪陵区1座,为鹅颈关立交,是部分苜蓿叶形互通式立体交叉。环形匝道的主要技术指标如表1所示,4座互通立交的平面图如图1所示。

表1 环形匝道主要技术指标
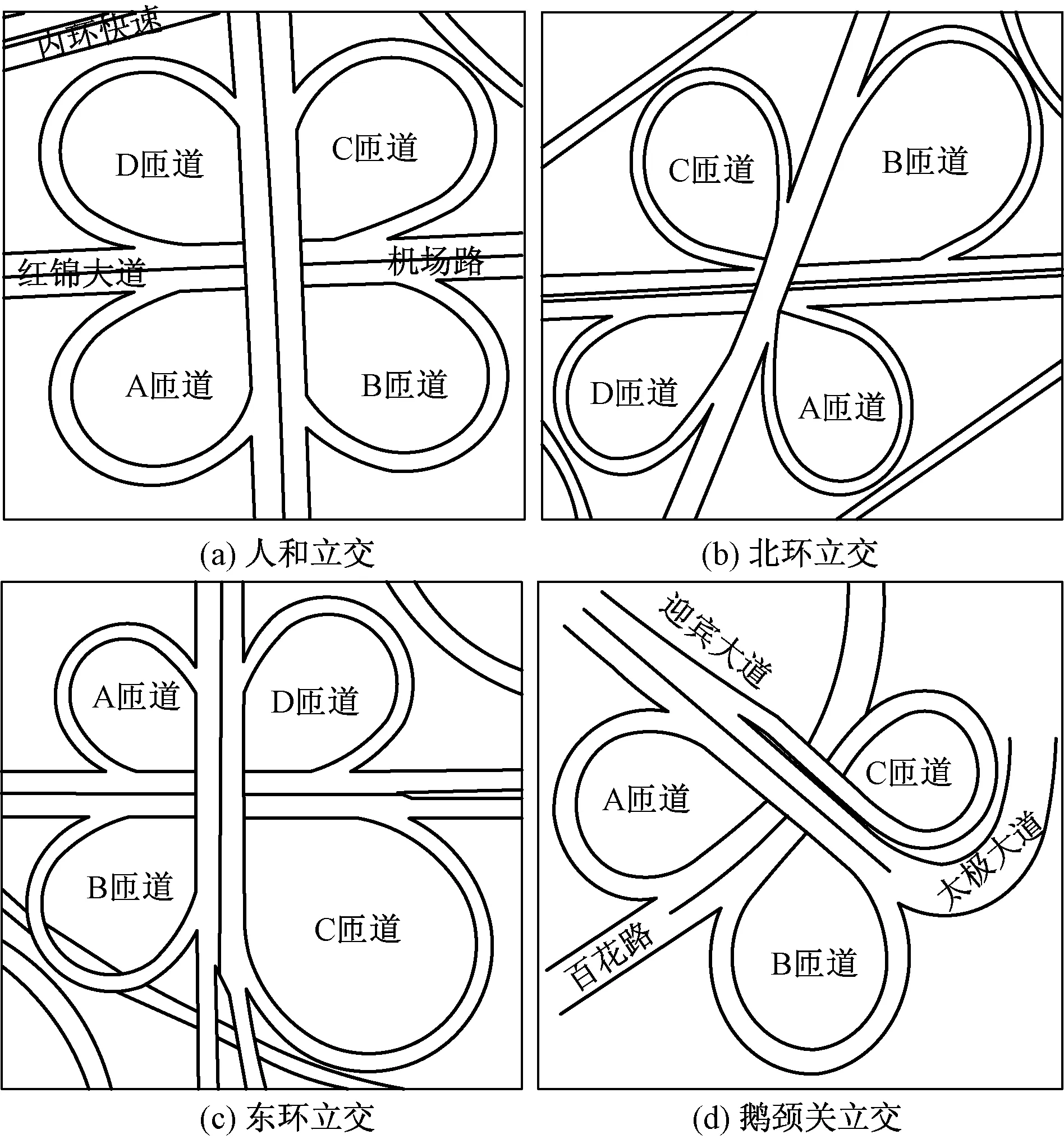
图1 试验立交以及环形匝道序号Fig.1 Loop ramps of the test interchanges
1.2 试验车辆和被试
单一的车载全球定位系统(global position system,GPS)设备在山区道路行驶环境下,路侧高层建筑、高架桥/立交桥桥面板和路侧茂密植被会遮挡卫星信号,导致汽车位置坐标实时数据缺失,速度数据失真或者中断。用航姿测量系统[惯性测量单元(inertial measurement unit,IMU)与双GPS天线相组合]来记录汽车轨迹、速度、加速度和行驶姿态数据,在GPS信号丢失时,系统算法对惯导单元测得的加速度信号进行积分,来完成断档数据的补偿。在汽车前后玻璃上各安装1个行车记录仪,分别摄录前、后的向行驶环境。试验车型为7座商务车。试验车辆如图2所示。
共有8位驾驶人参与3座苜蓿叶立交的实车驾驶试验,其中男性5人,女性3人,年龄分布为23~56岁,平均年龄31.5岁,驾龄分布1~22年,平均驾龄7.6年,驾驶里程分布为(0.3~50)×104km,平均为17.29×104km。被试是从社会上招募,熟悉车辆状况和驾驶操作。
1.3 试验流程与数据处理
试验开始前告知驾驶人按照平日的驾驶风格来操纵车辆,行驶过程中不对被试提出任何要求也不进行任何暗示,最大程度地维持驾驶员的自然驾驶习惯。自然驾驶试验的时间跨度为2016年6月至2017年10月,均安排在10:00—17:00时段内进行,避开拥堵时段。

图2 试验车辆Fig.2 Test vehicles
苜蓿叶形互通立交连接的是封闭的、中间有隔离带的高速道路,无法就近在高速公路路面上完成调头。因此,在实验前规划行驶路线,包括数据记录起点、前方掉头位置和方式等。环形匝道是通过右转270°来实现左转,驾驶人每次行驶可以遍历4个匝道。驾驶人遍历全部匝道之后向前行驶至临近立交,通过两个环形匝道的旋转实现掉头,返回至试验立交,继续下一次匝道遍历。根据现场试验条件和交通状况,每位被试完成试验路线的3~6次遍历行驶。
在后期试验数据处理过程中,截取匝道范围内的汽车行驶速度和横向加速度(ay)数据,绘制连续的横向加速度曲线。同时,观察前置行车记录仪的视频图像,对前方有慢行车辆,比如大货车、大巴车等情况进行标记。
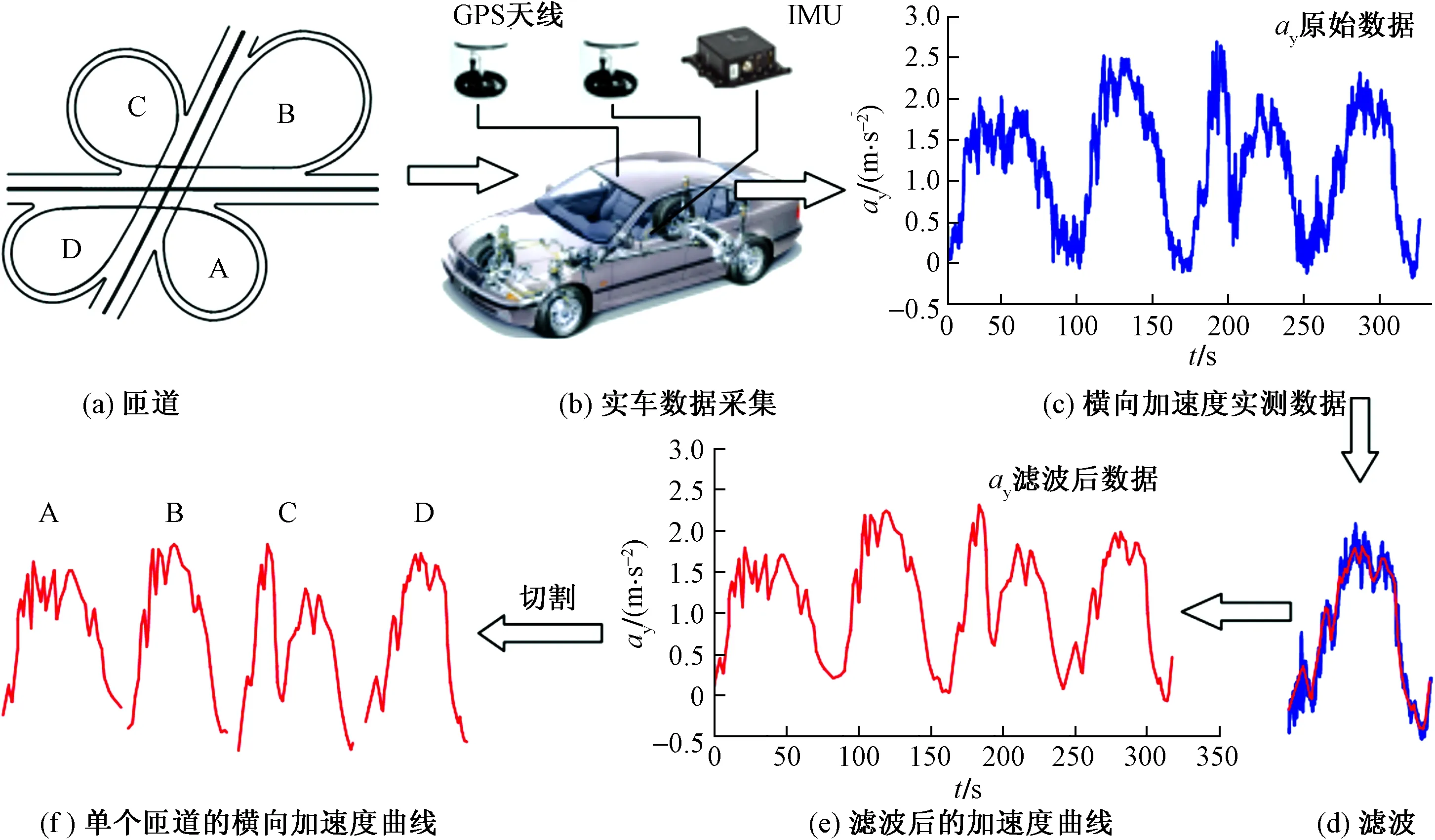
图3 横向加速度数据滤波以及切割Fig.3 Filtered curves of lateral acceleration
横向加速度信号是通过IMU单元模块的加速度计采集,IMU固定在汽车座椅下方,行驶过程中汽车的振动会导致横向加速度信号出现高频振荡,即横向加速度信号的构成原来有两部分,一是汽车曲线行驶过程中由于匝道轨迹曲率产生的车身横向加速度,二是车身构件高频振动导致的横向加速度。试验关心的是第一类信号源,因此第二类信号可视为噪声需要剔除。为此,在分析之前使用MATLAB软件中的滤波工具箱对数据进行滤波,之后再对曲线进行分割,即每次匝道行驶得到1条横向加速度连续(ay)曲线,如图3所示。
2 横向加速度连续变化特征

图4 人和立交环形匝道横向加速度变化曲线Fig.4 Lateral acceleration measured on loop ramps of Renhe interchange
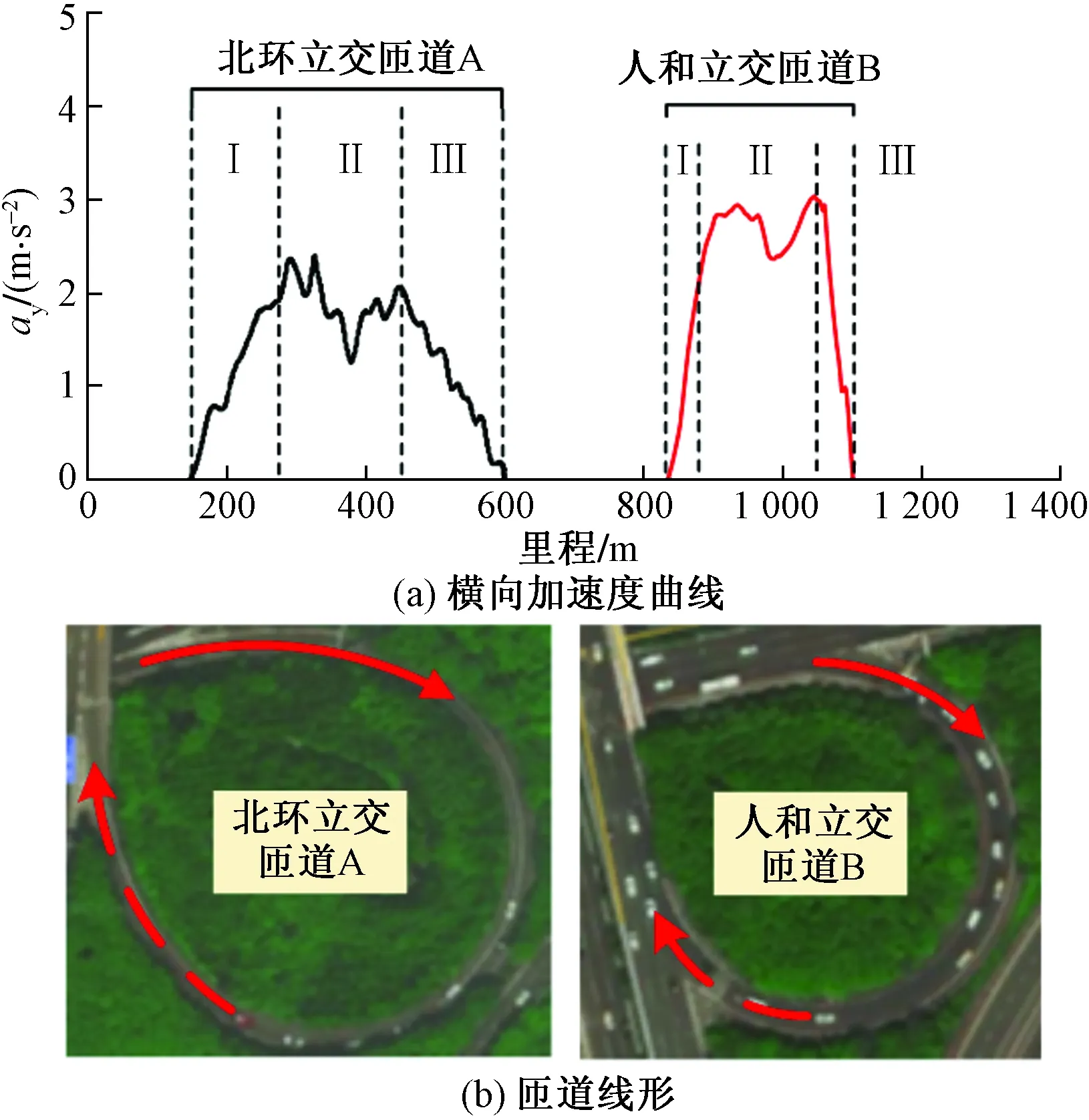
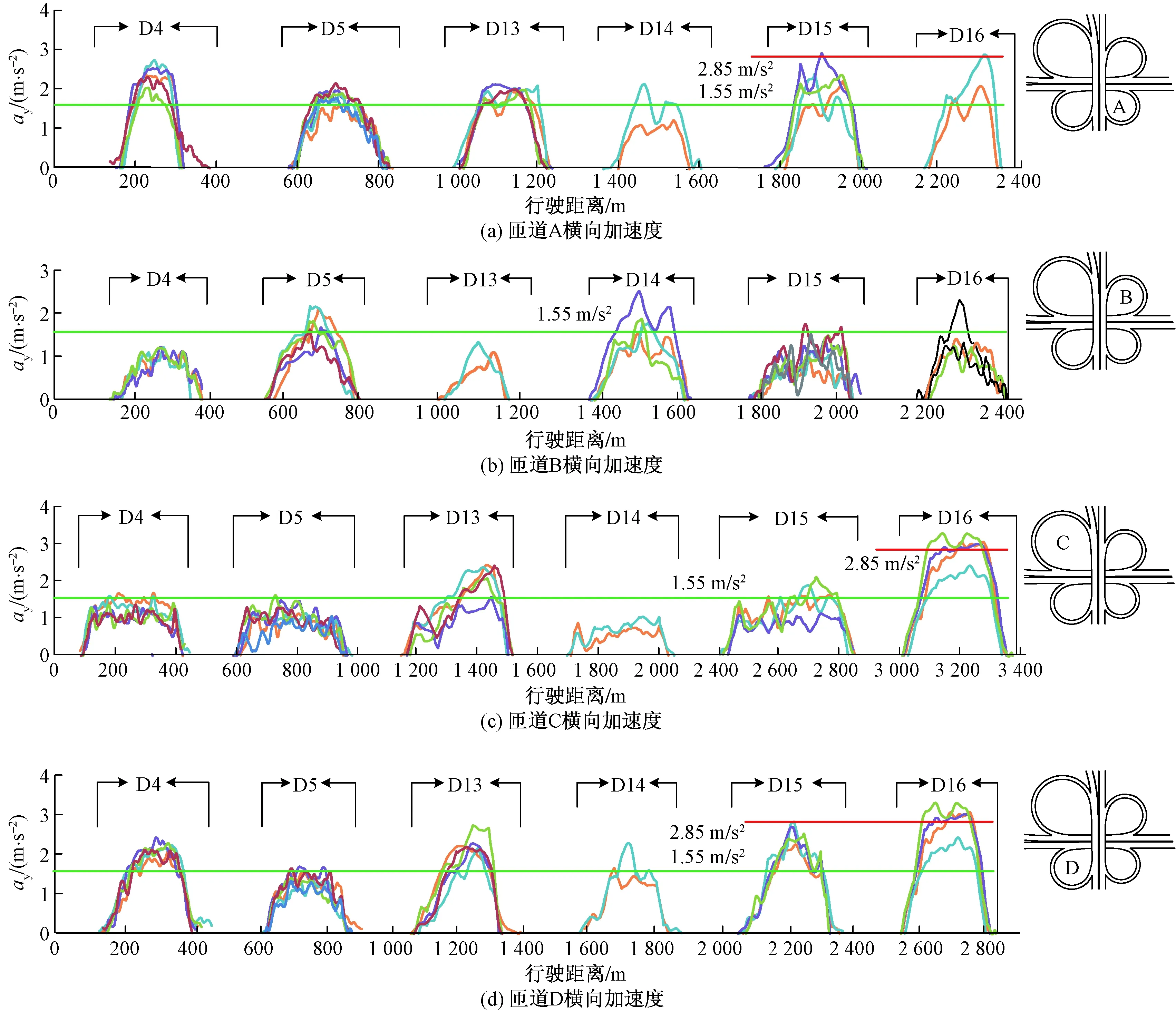
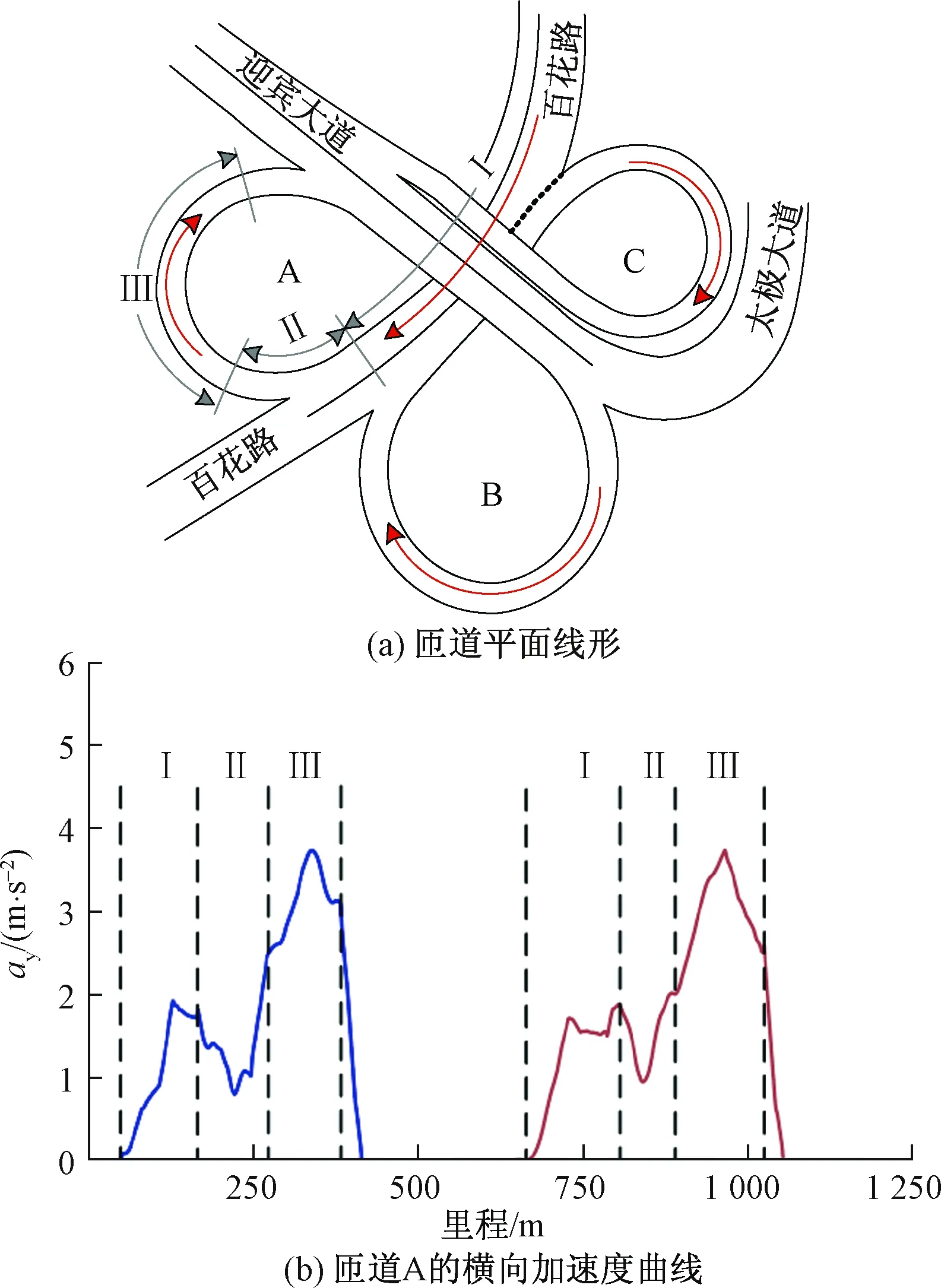
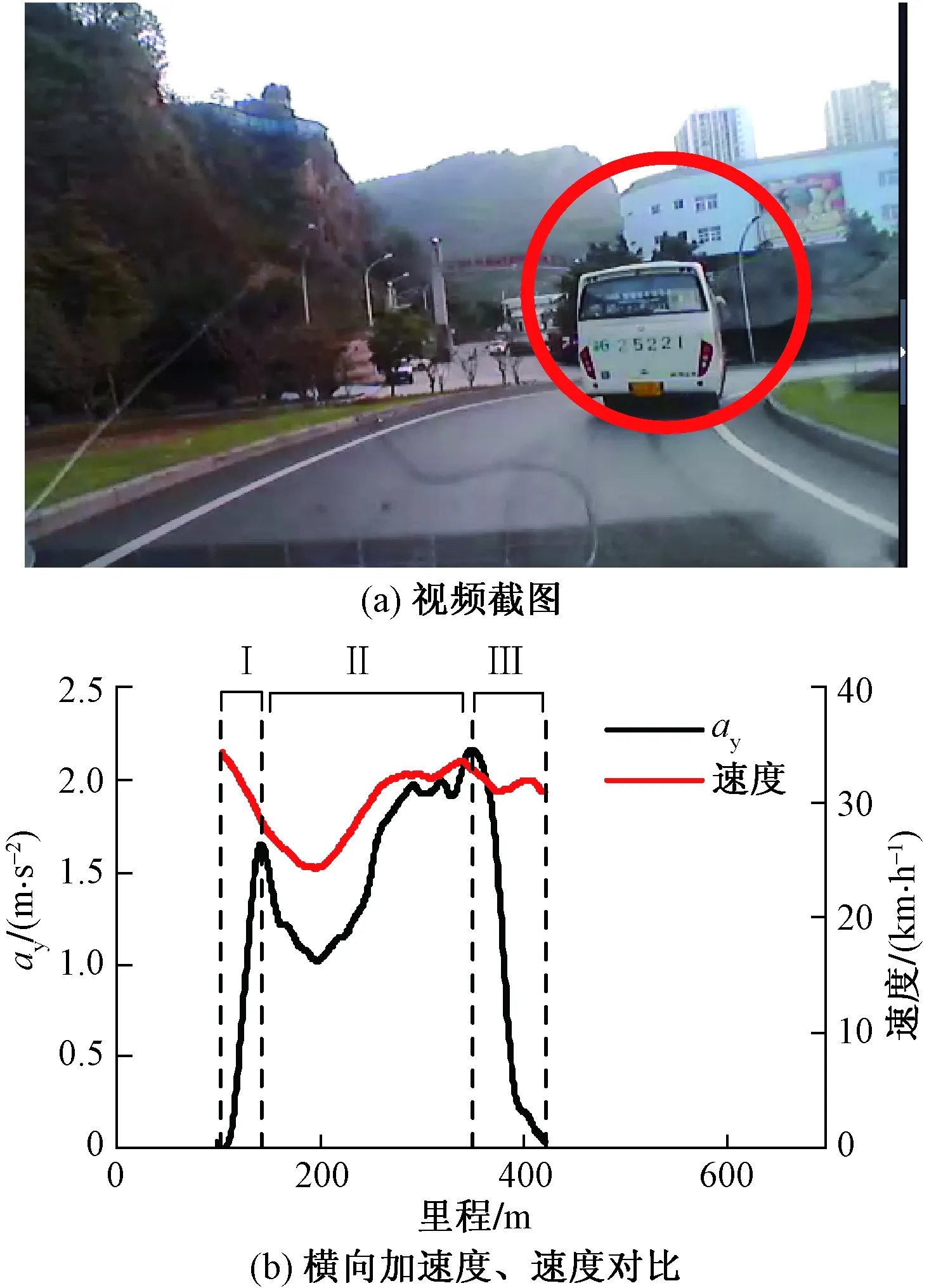
某位驾驶人在某一互通立交上的行驶遍数为n,对于该位驾驶人,每条立交匝道可得到n条ay曲线,然后将n条曲线叠加在一起,得到该驾驶人在环形匝道范围内的横向加速度曲线图。图4~图7所示是4座苜蓿叶形立交各条环形匝道的横向加速度连续变化曲线,图中的Di为驾驶人编号,曲线图下方给出了驾驶人的主要信息,其中字母M表示驾驶人为男性,F为女性,NL为年龄,JL为驾龄,LC为该驾驶人自取得驾照以来的累计行驶里程,单位为104元km。图中同时标注了基于ay值的横向舒适性阈值,即ay>4.05 m/s2时不舒适且难以忍受,2.85 m/s2 图4所示为人和立交(位于重庆主城区)4条环形匝道的ay曲线,该立交的环形匝道同时满足轴对称与中心对称条件,相交道路的交叉角为90°,是标准的苜蓿叶形样式。从图中可见,不同的驾驶人在同一条匝道上的横向加速度幅值(峰值或峰值点附近的幅值)之间存在比较大的差异;但根据幅值水平大致将其分为2类,第1类驾驶人选择比较高的ay,有D1、D2和D16,第2类是选择较低横向加速度幅值的驾驶人,包括D4、D5和D13、D15。由于横向加速度与速度正相关,因此第1类驾驶人比较高的横向加速度值是由于环形匝道行驶速度较高导致的结果;同时,同一类的驾驶人在不同的匝道上均表现出了稳定的驾驶行为特征(比如D1在4条匝道上的ay均很高)。就舒适性而言,仅驾驶人D1在C匝道行驶时横向加速度超出了难以忍受阈值;更多的是分布在“舒适性一般”区间。 就ay连续曲线的外观形态而言,在图4中,在同一匝道上不同驾驶人的曲线形态差别较大;同时,同一位驾驶人在不同的匝道上行驶时,横向加速度曲线也有差别,以驾驶人D1为例,C匝道和D匝道横向加速度曲线形态的差异非常大。 图5 北环立交环形匝道横向加速度变化曲线Fig.5 Lateral acceleration measured on loop ramps of Beihuan interchange 图5所示为北环立交环形匝道的横向加速度连续曲线,该立交连接的相交道路交叉角为64°。与连接正交道路的环形匝道相比(比如人和立交环形匝道),北环立交环形匝道平面线形的圆曲线长度比例降低,而缓和曲线长度在平曲线长度中的占比增加。由于这个因素,ay曲线的外观形态与人和立交相比存在一个明显差别:汽车驶入环形匝道后ay增长的速率较慢,驶出匝道时ay降低的速度同样较慢,如图6所示。在幅值水平方面,仅有被试D13在匝道A、被试D16在匝道D上有ay超过不舒适阈值,其余的ay曲线峰值有一半是在“舒适性一般”区间,还有一半是在1.55 m/s2之下,即舒适性良好。图7所示为东环立交各条环形匝道的ay曲线,驾驶人D16的ay幅值显著高于其余驾驶人;匝道B和C有多个驾驶人的ay曲线幅值是全部低于1.55 m/s2,行驶舒适性优于前两座立交的环形匝道。 图6 横向加速度增长率与匝道平面线形Fig.6 Increase rate of lateral acceleration and ramp alignment 图7 东环立交环形匝道横向加速度变化曲线Fig.7 Lateral acceleration measured on loop ramps of Donghuan interchange 图8所示为重庆市涪陵区鹅颈关立交环形匝道的ay连续曲线,从中能观察到3个显著特征:一是驶入匝道后ay幅值增长更快,驶出匝道时也更快地回落;二是ay幅值更高,落在不舒适区间的比例显著高于前3座立交的环形匝道,即环形匝道的横向舒适性变差;三是匝道中段ay曲线幅值呈现上扬的趋势,表明驾驶人在匝道中段有加速行为。 此外,在图8中观察到A匝道上的ay曲线并不是从零值开始,即汽车在进入A匝道之前已经承受了一定的横向加速度。查看鹅颈关的路线地图,发现A匝道连接的百花路(驾驶人从百花路驶入A匝道),其平面线形是曲线,如图9(a)所示,因此是曲线行驶导致了ay曲线在阶段Ⅰ[图9(b)]幅值不为零。另外,ay曲线在阶段Ⅱ发生幅值衰减是因为驾驶人在立交出口(即匝道入口)有减速行为所致。 在图4、图5、图7和图8中,能观察到ay曲线在经历快速增长之后,幅值会达到一个相对稳定的阶段,但在该阶段,大多数ay曲线即使滤波之后仍会有明显的震荡。曲线行驶时导致ay曲线震荡的原因主要有3种:一是轨迹曲率发生变化;二是行驶速度发生变化;三是路面不平顺导致的车身侧倾摇动等。4座立交中,仅东环立交的环形匝道是双车道匝道,其余都是单车道。但即使是双车道匝道,通过观察前置行车记录仪视频图像和GPS轨迹发现,驾驶人在匝道范围内都极少变道,即全程保持内侧车道或者外侧车道行驶,轨迹曲率突变的概率非常低。基于此,ay曲线震荡的原因主要是后两种,即速度变化和车身摇摆。其中速度变化导致的震荡特点是低频、但幅值较大。图10所示为一例由于速度变化导致的ay曲线震荡,实验车驶入匝道后,驾驶人发现前方路面上有一辆大客车缓行,如图10(a)所示,因此降低行驶速度以保持安全车距,如图10(b)所示。 在图4~图8中观察到,不同驾驶人之间、不同匝道之间的横向加速度曲线外观形态均存在显著的差异,但仍可以对其进行归类。对ay曲线进行趋势线拟合,可以抽象出其幅值变化模式,如图11所示,一共有7种变化模式。其中模式1是两阶段模式(驶入增长阶段和驶出回落阶段),ay幅值达到峰值之后随即下降,既没有经历幅值相对稳定的中间阶段。模式7是四阶段模式,除了驶入增长阶段和驶出回落阶段之外,中间过程由于幅值出现了阶跃又可细分为两个阶段。模式2~模式6都是三阶段模式,即驶入增长阶段、中间稳定阶段和驶出回落 图8 鹅颈关立交环形匝道横向加速度变化曲线Fig.8 Lateral acceleration measured on loop ramps of Ejingguan interchange 图9 鹅颈关立交A匝道的横向加速度Fig.9 Lateral acceleration on ramp A of Ejingguan interchange 图10 横向加速度异常波动分析Fig.10 Abnormal fluctuations of lateral acceleration curves 图11 横向加速度典型变化模式Fig.11 Typical patterns of lateral acceleration curves 阶段,不同模式之间的区别主要体现在中间稳定阶段的变化形态上;并且,仅有模式3的ay幅值在中间阶段是维持稳定,其余模式的ay幅值都是变化的。 在ay曲线的各种模式中,模式2(中间阶段ay幅值持续增长)是占比最大的一种模式,尤其是行驶速度偏高、ay幅值较大的情况下,比如鹅颈关立交。此外,模式1的ay幅值变化与现行的设计假设完全不同,由于匝道中段是曲率半径恒定的圆曲线,ay幅值一直在变化的原因是汽车行驶速度在圆曲线范围内一直在调整;并且此类模式都是发生在ay幅值非常高的驾驶人身上。 环形匝道具有小半径、大转角、坡度陡等显著特征,是普遍认为行驶条件相对困难的路段单元类型。横向加速度是衡量弯坡组合路段行驶安全性和舒适性的主要参数,但从现有的研究中无从了解到环形匝道的横向加速度特征,为此通过实车试验采集了自然驾驶条件下的汽车横向加速度连续数据,明确了环形匝道的横向加速度幅值水平、变化趋势和模式,主要结论如下。 (1)不同驾驶人的横向加速度曲线幅值和外观形态存在显著差异,但可以对其进行归类。 (2)在所观测的4座立交中,3座完全苜蓿叶形互通立交环形匝道的横向舒适性水平一般,1座部分苜蓿叶形立交环形匝道的舒适性水平较差(不舒适)。 (3)环形匝道的横向加速度变化模式可以分为7种,其中三阶段模式为5种,两阶段和四阶段各1种,占比最大的模式特征是横向加速度值在匝道中间阶段仍是单调上升的。 (4)缓和曲线的长度对横向加速度增长率有显著影响,进而影响到横向加速度变化模式。
3 横向加速度幅值波动分析
4 横向加速度幅值变化模式


5 结论