基于多视场视觉系统的倒装焊机调平和对位
2020-05-07王瑞鹏狄希远
景 灏,王瑞鹏,闫 瑛,狄希远
(中国电子科技集团公司第二研究所,山西 太原 030024)
0 引言
红外探测器主要用于红外热成像、红外遥感等方面,随着加工工艺技术的不断进步,探测器逐渐向高探测率、大面阵方向发展[1]。倒装互连作为探测器的主要互连工艺,它的互连过程包含调平、对位和压焊[2],如图1所示,其影响成品率的关键因素有两点,一是芯片和基板能够准确调平,使压焊后铟球产生均匀形变,二是通过精确对位,使芯片和基板上的焊点可以相互对准,从而保障产品的光、机、电特性[3]。因此,倒装焊机需要解决的关键问题就是倒装互连时芯片与基板的调平和对位问题。本文将针对该问题,介绍一种多视场的视觉系统,通过视觉图像分析和算法处理,配合精密运动系统,实现倒装焊机的调平和对位。
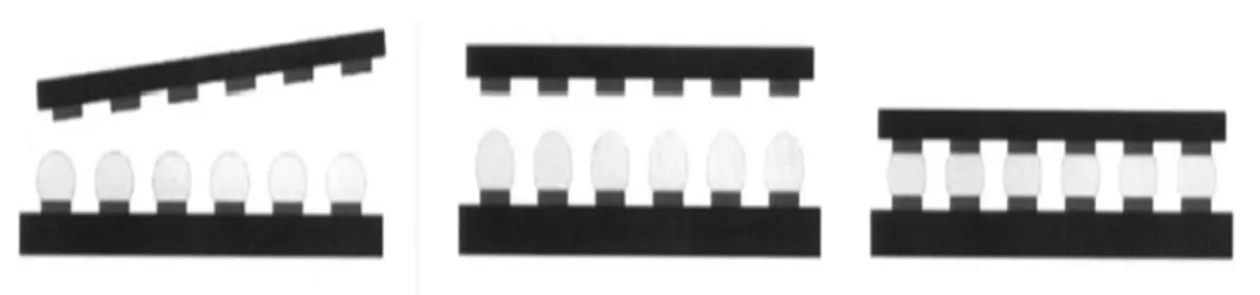
图1 红外探测器倒装互连示意图
1 视觉系统工作原理
倒装焊机视觉系统由大视场、准直视场和对位视场组成。大视场视野大,分辨率低,用于基板的粗定位。准直视场可投射特定十字靶标图形,通过分析芯片和基板平面反射回的图像,确定平行度调节量。对位视场视野小,分辨率高,可识别芯片和基板的标记图形,精确计算对位调节量。
设备配备精密运动系统,包含5个平台和9个运动轴,各个平台对应的运动轴名称和数量如表1所示,对应的编号和分布如表1和图2所示。基板对位平台实现基板的平移和旋转运动,光学运动平台实现准直和对位视场的平移运动,半球摇摆俯仰平台以基板平面为基准实现芯片和基板的调平运动,ZUBA运动平台实现芯片取料、芯片聚焦和压焊运动,聚焦平台实现基板聚焦运动。
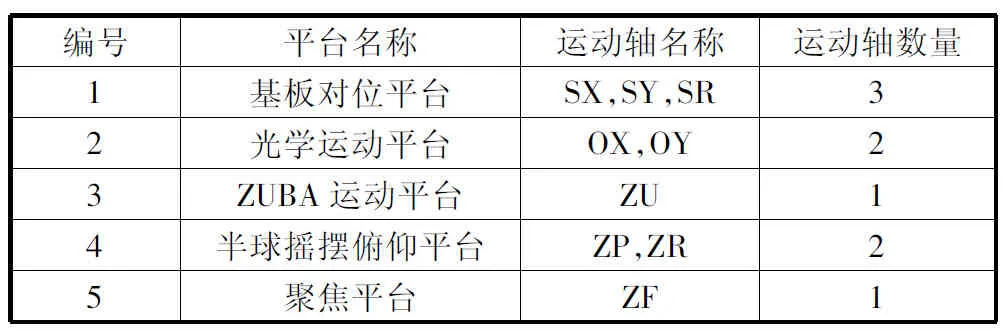
表1 精密运动系统运动轴分配表

图2 精密运动系统工作原理图
2 视觉系统设计
目前,红外探测器焊点加工尺寸均为微米级,其高精度的倒装互连工艺对倒装焊机的调平和对位能力提出了更高的要求。针对该要求,现将设备视觉系统和精密运动系统的设计介绍如下。
2.1 多视场视觉系统设计
2.1.1 大视场设计
大视场的安装结构如图3所示,CCD相机和镜头采用斜装的方式,拍摄放置于基板夹具上的基板,由于相机倾斜拍摄,需要对图像进行梯形校正,并基于基板对位平台进行标定。大视场将基板相对于芯片对齐的位置作为基准位置,手动放置基板后,运行大视场粗定位功能,可以对基板的位置进行粗调整,使基板和芯片的标记图形能够同时处于对位视场内。
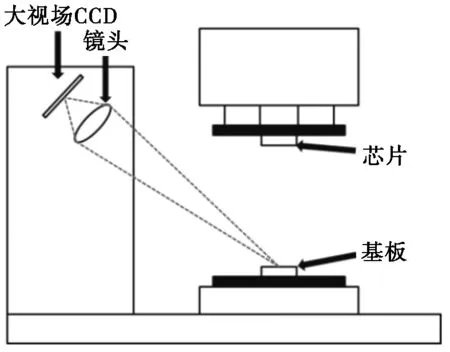
图3 大视场设计原理图
2.1.2 准直视场设计
准直视场的安装位置如图2所示,分别将明亮的十字靶标图形打在芯片和基板的反射面上,反射图形传送到CCD上。根据光学准直原理,若CCD上显示两个不重合的十字靶标图形,则芯片和基板不平行,通过驱动半球摇摆俯仰平台,调节两个十字靶标图形至完全重合,则可以完成芯片和基板的调平。
2.1.3 对位视场设计
对位视场的安装位置如图2所示,拍摄芯片时,打开芯片光源,关闭基板光源,物镜固定不动,ZUBA运动平台带动芯片,调整芯片高度来实现芯片聚焦;拍摄基板时,打开基板光源,关闭芯片光源,聚焦平台带动物镜,调整物镜高度来实现基板聚焦。视觉对位时,将标记图形制作为模板,分别拍摄芯片和基板的标记图形进行定位,以芯片位置为基准,分析计算出基板的旋转和平移的调节量,驱动基板对位平台进行对位调整。
2.1.4 多视场视觉系统的关系
多视场视觉系统包括大视场、准直视场和对位视场,三者既功能独立,又相互联系。大视场视觉系统斜装在工作台侧面,基于基板对位平台进行标定,实现基板的粗定位。准直和对位视场统一安装于光学运动平台。对位视场和大视场的共同点是,两视场均基于基板对位平台进行标定,即两者空间坐标统一,两者的区别是对位视场相比于大视场视野更小,分辨率更高,可用于微米级标记图形的精确定位。
2.2 精密运动系统设计
精密运动系统的各平台分布如图2所示。其中,基板对位平台、光学运动平台、ZUBA运动平台和聚焦平台运动机构进行了整体搭建,保证对位平台的稳定性,统一采用光栅组反馈进行闭环运动控制,采用UP级低摩擦系数线性导轨导向,能够满足设备的运动精度要求。
半球摇摆俯仰平台采用气浮导向,使用两台步进电机驱动精密螺旋推杆,使球凸产生运动,从而实现芯片和基板的调平运动。旋转中心位于芯片位置附近,可降低摇摆运动对XY方向的影响。
半球摇摆俯仰平台的设计原理如图4所示。已知步进电机推杆和球面连接杆交点到球面顶点的距离为A,球面半径为R,转角分辨率为B,转角行程为C,步进电机导程为S,传动装置的综合传动效率为η,减速比为i,保持转矩为HT,设:D为步进电机单脉冲行程,θs为步进电机步距角,E为整个行程允许位移,F为推力,计算过程如下:
D=(A+R)×tan(B).
(1)
(2)
E=(A+R)×tan(C).
(3)
HT=(F×S)/(2π×η×i).
(4)

图4 半球摇摆平台设计原理图
2.3 视觉软件功能及算法
视觉软件是视觉系统的大脑,识别输入的图像信息,完成数据的分析和输出。倒装焊机配备了多视场视觉系统,准直视场采集用于调平的十字靶标图形,对位视场采集用于对位的标记图形。于是,倒装焊机的调平和对位能否实现,很大程度取决于视觉软件对图像信息的识别和分析效果。
1) 模板:在图像识别的方法当中,基于形状的模板匹配法具有处理时间短,精度高,可通过切换模板灵活适应不同工件图形等优势,更加符合本系统视觉软件需求。制作模板和对位时对图像采集的要求为,通过聚焦使图像有清晰的轮廓,通过调整光源和相机参数使图像呈现鲜明的对比特征。
2) 标定:视觉标定的作用是建立视场中像素坐标系和空间坐标系之间的关系。大视场和对位视场均基于基板对位平台进行标定,将基板放在基板夹具上,分别使用两个视场进行模板制作,然后采用传统的九点标定方法完成视场标定。准直视场的标定方式在下一节讨论。
3) 准直视场调平:准直视场基于半球摇摆俯仰平台进行标定,视场分别采集芯片和基板平面反射的十字靶标图形,以基板平面为基准,可得出两图形中心位置像素偏差(pix),执行机构为步进电机,其运动量单位为脉冲(pulse)。设基板平面反射的十字靶标图形位置为原点,两图形像素偏差为(px,py),ZP轴运动量为zp,ZR轴运动量为zr,则有:
zp=k1·px+c1.
(5)
zr=k2·py+c2.
(6)
其中,k1,k2,c1,c2均为常数,通过多点拟合,得出上述公式的系数,则准直视场中分析得出的像素偏差可以直接转化为电机的运动调节量,从而实现调平。
4)大视场粗定位:大视场将整个基板图形作为模板,以基板相对于芯片对齐时的位置为基准,得到坐标位置(x0,y0)和角度r0。手动放置基板后,大视场采集基板的当前图形,得到坐标位置(x,y)和角度r。设坐标位置偏差为(Δx,Δy),角度偏差为Δr,则:
Δx=x-x0.
(7)
Δy=y-y0.
(8)
Δr=r-r0.
(9)
根据运算结果,驱动基板对位平台,分别进行旋转和平移运动调整,完成基板的粗定位。
5) 对位视场精对位:本文采用四点对位方式,对位原理如图5所示。A、B为芯片上的两个标记图形,C、D为基板上的两个标记图形,其中A、C为一组,B、D为另一组,均形成对应关系。对位视场分别采集A、B、C、D图形,分析得到各图形对应坐标(x1,y1),(x2,y2),(x3,y3),(x4,y4)。对位过程分为两步,第一步为计算旋转偏差,进行旋转调节,第二步为计算平移偏差,进行平移调节,公式推导如下:
a)向量AB与向量CD夹角就是基板相对于芯片的偏转角,其公式为:
(10)
(11)
(12)

(13)
(14)


图5 对位原理示意图
3 结束语
本文从红外探测器倒装互连工艺需求出发,提出了多视场视觉系统的设计方案,给出了相应的视觉算法,配合精密运动系统实现倒装焊机的调平和对位,能够满足红外探测器生产的实际需求。
