基于RBF神经网络的船舶自适应区域到达控制
2020-04-30孙晓明郑兴伟霍海波田中旭
孙晓明,徐 庆,郑兴伟,霍海波,田中旭
(1.上海海洋大学 工程学院,上海 201306;2.北京航空航天大学 自动化科学与电气工程学院,北京 100191)
0 引言
随着人们对新的油气资源、生物资源的关注,对海洋资源的探索和开发已是一种必然趋势。海洋贸易、海洋运输以及海岸作战登陆已是一个国家话语权的一种体现。不论海洋资源的开发还是海上作战部署,动态复杂环境下海洋水面船舶的控制策略研究都是当前的研究热点[1-4]。
综合考虑船舶节能、航行安全、减排等重要控制因素,以及船舶运动的非线性、模型不确定性、外界未知干扰存在的情况下,为实现海上作业任务,对船舶跟踪控制的研究皆具有重要意义[5-7]。当前船舶控制研究主要有设定点跟踪、路径跟踪和轨迹跟踪[8-13]。定点控制研究中,船舶的目标位置为一固定点。在路径跟踪控制中,需要预先设定静态几何位置目标点,与时间无关。而在轨迹跟踪控制中,船舶需要跟踪时变目标期望轨迹,达到轨迹实时跟踪的控制目的。
非常有趣的是,从人类的很多作业任务中,我们发现移动到达的最终目标往往是一个区域而非目标点,比如汽车停泊、投篮、飞镖游戏等等。区域到达控制近年来被提出[14-17],其控制目标由设定点变为期望目标空间区域,具备计算量小、快速性好、鲁棒性和实时性强等特性。文献[15]针对机器人系统首次提出了区域到达控制的概念,它是对设定点到达控制算法的一种扩展。文献[16]针对多机器人系统,研究了多个目标区域机器人协同到达控制算法,大量的机器人群体,最终分别到达不同的目标区域内。此外,区域到达控制可被同时应用于微观/宏观系统,通过引入目标区域,作为宏观系统的水下机器人可以更加灵活地调整自身位置,而作为微观系统的机械臂可以执行各种各样的水下作业任务[17]。
反演法的设计思想是将复杂非线性系统降阶分解为若干子系统,按照从前往后依次递推的方式,为每一个子系统构造李雅普诺夫函数,设计中间虚拟反馈控制量,使所有的子系统都能够渐进稳定,最后,设计整个控制系统的控制律。对于不确定性系统,该方法往往与自适应控制结合使用,以实现鲁棒性控制。
由于传统的反演法要求系统模型结构及参数精确已知,而船舶系统具有非线性强、时滞、惯性大的特性,且外界扰动未知,速度不易测量,因此对船舶的跟踪控制问题具备一定的挑战性。在过去的数十年里,已被普遍证实,神经网络和模糊逼近方法可以以任意精度实时逼近不确定的复杂非线性系统[18-19]。
神经网络方法已被广泛应用于逼近非线性系统数学模型中的未知项,因而,不再需要花费太多的精力在系统建模上,这尤其适用于建模非常困难的应用场合。在考虑海风、海浪以及海流等外界干扰影响比较大的情况下,精确的船舶模型很难得到,模型中往往存在着一定的不确定性,故而可以采用神经网络方法来逼近以及补偿船舶系统模型中存在的任意不确定项。
针对全驱动海洋水面船舶系统,提出了一种基于反演的自适应区域到达控制算法。利用RBF神经网路较强的自学习能力,可无需船舶的精确模型,在线实时逼近控制器中的未知非线性部分。由于引入了目标区域函数,目标区域可设定为任意形状,因此,区域到达控制算法具有节省能源以及优化船舶性能等优势。通过李雅普诺夫理论证明了所提出的船舶区域到达控制算法的稳定性。最终,通过仿真验证了所提出的船舶区域到达控制算法的有效性。
1 问题描述
1.1 船舶动力学模型
在考虑模型参数不确定和外部干扰存在的情况下,建立三自由度多输入多输出的全驱动海洋水面船舶数学模型如下[20]:


(1)
其中:η=[x,y,ψ]T∈3,是由大地坐标系下船舶的位置坐标(x,y)和航向角ψ所构成的向量;v=[u,v,r]T∈3,是船舶速度向量,分别由纵向前进速度、横漂速度和艏摇角速度组成;d(η,v,t)∈3是由不确定的横向、纵向和艏向扰动项构成的向量,分别来自外部环境、未建模的动态等等;τ∈3为船舶控制输入向量。
J(η)∈3×3为三自由度雅可比转换矩阵,其数学表达式为:
这里,状态转换矩阵J(η)满足JT(η)Jη=I以及J-1(η)=JT(η)的特性。M∈3×3为系统惯性矩阵,并且M=MT>0,C(v)∈3×3为科氏向心力矩阵,D(v)为阻尼参数矩阵,g(η)为未知恢复力和力矩向量。
1.2 控制目标
区别于传统的点到达控制,在船舶区域到达控制概念中,控制目标为期望的目标空间区域而非设定点。本文的控制目的是设计控制器τ,使船舶能够从任意初始位置,收敛到达至预先设定的目标区域,如图1所示,区域到达控制中期望的目标区域可以用不等式函数来设定。船舶实际位置用向量=[x,y]T来表示,取任意参考点0=[0,x,0,y]T为期望目标区域的中心点。定义不等式函数ζ(δ0):
ζ(δ0)≤0
(2)
为期望的目标区域,其中δ0=-0,ζ(δ0)∈为一阶连续可微的标量函数。期望的目标区域可以设定为任意形状,因此,为方便描述,目标区域可设定为一个以0为中心,半径为r0的圆,则目标区域不等式函数可写为如下形式:
(3)
其中:ζ(δ0)∈2→为船舶的目标区域函数,该目标区域函数具有如下性质:
1)船舶与目标区域的距离有界性决定了目标区域函数的有界性;
2)目标区域函数是关于船舶与目标区域的距离变量,δ0,连续并可微的。
很显然,假如设定目标区域的半径为零,控制目标区域将缩小为一个目标点,因而可以得出区域到达控制概念是对设定点到达控制算法的扩展。

图1 船舶区域到达控制原理图

(4)
其中:δη0=η-η0,η0=[0,x,0,y,ψ0]。构造船舶目标势能函数:
(5)
其中:k为正常数,该目标势能函数具有如下性质:
1)如果ζ(δ0)≤0,此时船舶已收敛到达至目标区域内,则P(δη0)=0,势能函数关闭,不产生作用;
2)如果ζ(δ0)>0,即船舶位于目标区域外,尚未进入目标区域,则P(δη0)>0,势能函数产生作用,使船舶不断收敛跟踪至目标区域;
3)如果ζ(δ0)>0,则P(δη0)随着的增加而单调递增,即船舶距离目标区域越远,势能函数值越高,船舶的收敛速度越快;
4)如果ζ(δ0)→∞,则P(δη0)→∞,也就是当船舶距离目标区域无穷远时,目标势能函数产生的作用值也趋于无穷大,以实现船舶的区域到达控制目标。
2 自适应区域到达控制方法
在实际应用中,系统模型往往存在不确定函数性。神经网络具有较好的自学习能力,可以以任一精度实时在线逼近任一未知非线性函数。从函数逼近方式上看,神经网络方法可分为全局和局部逼近两种,而局部逼近具有学习速度快的特性,RBF(径向基)函数就是一种局部逼近的神经网络,下文将对其进行详细介绍。
2.1 RBF神经网络
在控制工程中,RBF神经网络已被广泛用于逼近未知连续函数[21]:
fnn(Z)=WTS(Z)
(6)
其中:W=[w1,w2,…,wl]T∈Rl为权值向量,l为神经网络节点数,Z=[z1,z2,…,zq]T∈Rq为输入向量,S(Z)=[s1(Z),s2(Z),…,sl(Z)]T∈Rl为已知连续基函数向量,通常取si(Z)为高斯函数:
(7)
其中:μi=[μi1,…,μiq]T为径向基函数的中心向量,ηi为基宽参数。在紧集ΩZ⊂Rq上,RBF神经网络已被证明,其能够以任意精度逼近非线性连续函数:
f(Z)=W*TS(Z)+ε(Z),∀Z∈Ωz
(8)
其中:W*为最优常数权值向量,ε为逼近误差并且满足|ε(Z)|≤ε*,∀Z∈Ωz,未知常数ε*>0。由于W*为自定义量,对所有的Z∈Ωz⊂Rq,通常将其定义为能够使|ε|最小的量,也就是:
(9)
2.2 控制器设计
基于第一部分所提出的控制目标,在考虑参数不确定性和时变未知干扰的情况下,联合反演算法、神经网络逼近和二次李雅普诺夫函数等工具,设计了一种船舶区域到达控制器,预先设定期望的参考向量η0,使船舶能够最终收敛到达至目标区域。在反演递归步骤一中,通过引入势能函数可以实现目标区域跟踪这一控制目标,并且会给定一个虚拟反馈间接控制量α,用以实现特定的期望性能;而第二步则严格按照迭代方法,采用自适应技术,实时更新神经网络权值,提出关于总的李雅普诺夫函数V2的控制律τ,进而保证闭环系统的稳定性,具体设计过程如下:
步骤1 定义误差变量:
z1=η-η0
(10)
对其求导可得:
(11)
这里,v可以看作式(11)中z1子系统的虚拟控制量,选α=v,并设计李雅普诺夫函数:
(12)
其中:k>0,为正常数,将目标跟踪势能函数引入至李雅普诺夫函数中,可以保证船舶收敛跟踪至目标区域中。
由于v为虚拟控制量,不是z1子系统的实际控制量,故而定义误差量:
z2=v-α
(13)
并设定虚拟控制信号量:
(14)
其中:k1>0为设计参数。则:
(15)
步骤2 对变量求导得:
M-1d(η,v,t)-M-1g(η)
(16)
为稳定整个闭环系统(z1,z2),定义李雅普诺夫函数:
(17)

设计控制律和自适应更新律如下:
(18)
(19)


(20)

2.3 稳定性分析
引理1 如果函数V(t)为定义在时间t∈R+上的连续可微函数,并满足V(t)大于等于0且V(0)是有界的,假如满足如下不等式关系:
这里,c1>0,c2为常量,则认为函数V(t)是有界的。
定理1 对于具有动力学模型为公式(1)形式的海洋水面船舶系统,在设计区域到达控制律为公式(18)以及神经网络权值更新律为公式(19)的情况下,如果存在足够大的紧集Ωi,i=1,2,满足Zi∈Ωi,∀t≥0,则对于起始于任意紧急Ω0的有界初始条件下,满足:
1)闭环系统中的所有变量都是有界的,系统状态量以及神经网络权系数向量将最终收敛到某一有界紧集中;
证明:
1)首先,对V2进行求导得:
(21)
将控制律表达式(18)和更新律表达式(19)代入公式(21),根据杨氏不等式,整理可得:
(22)
其中:ρ,c,d1>0,并且:

2)通过求解式(22),可得:
0≤V2(t)<δ+(V2(0)-δ)exp(-ρt)
(23)
其中:δc/ρ>0,可进一步得到:
V1<δ+V2(0)exp(-ρt),
(24)
因此,假如给定:
则存在T,使得如下不等式成立:
∀t≥T
(25)
则:
(26)
这里,μ的大小取决于参数k,k1,k2,σi,Γi和逼近误差ε,因而增加增益参数和神经网络的节点数可以得到较好的跟踪性能。
3 仿真验证
本节采用CyberShip II全驱动无人船模型进行船舶区域到达控制算法的仿真验证,该船模是挪威科技大学海洋控制实验室根据1∶70的比例所构建的。
该模型船的动力学模型可以用式(1)来描述,式中矩阵M,C(v)和D(v)的数学表达式分别为:
这里,
c13=-m22v-m23r,c23=m11u
d22=-Yv-Yv|v|v|-Y|r|v|r|,
d23=-Yr-Yv|r|v|-Y|r|r|r|,
d32=-Nv-Nv|v|v|-N|r|v|r|,
d33=-Nr-Nv|r|v|-N|r|r|r|.
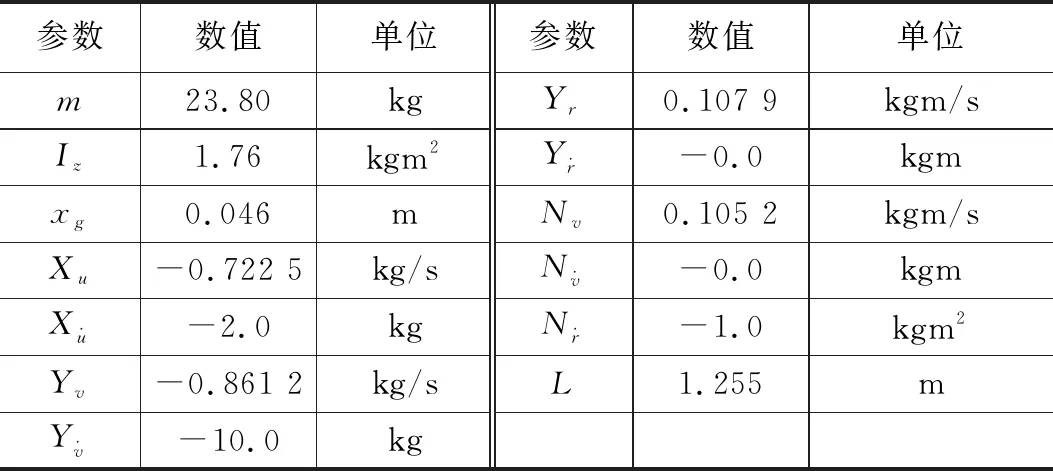
表1 无人船主要参数列表
为了便于仿真实验验证,设定期望目标区域为半径r0=2的圆,中心位置0=[5,-8],并随机指定船舶初始位置为(0)=[0,0]。所采用的RBF神经网络节点数为20个,即l=20,高斯函数的中心矢量,μi的每一分量均匀分布在[-5,5],基宽取1,网络的初始权值取0,仿真中采用控制律式(18)和自适应律式(19),得到仿真结果如图2~3所示。
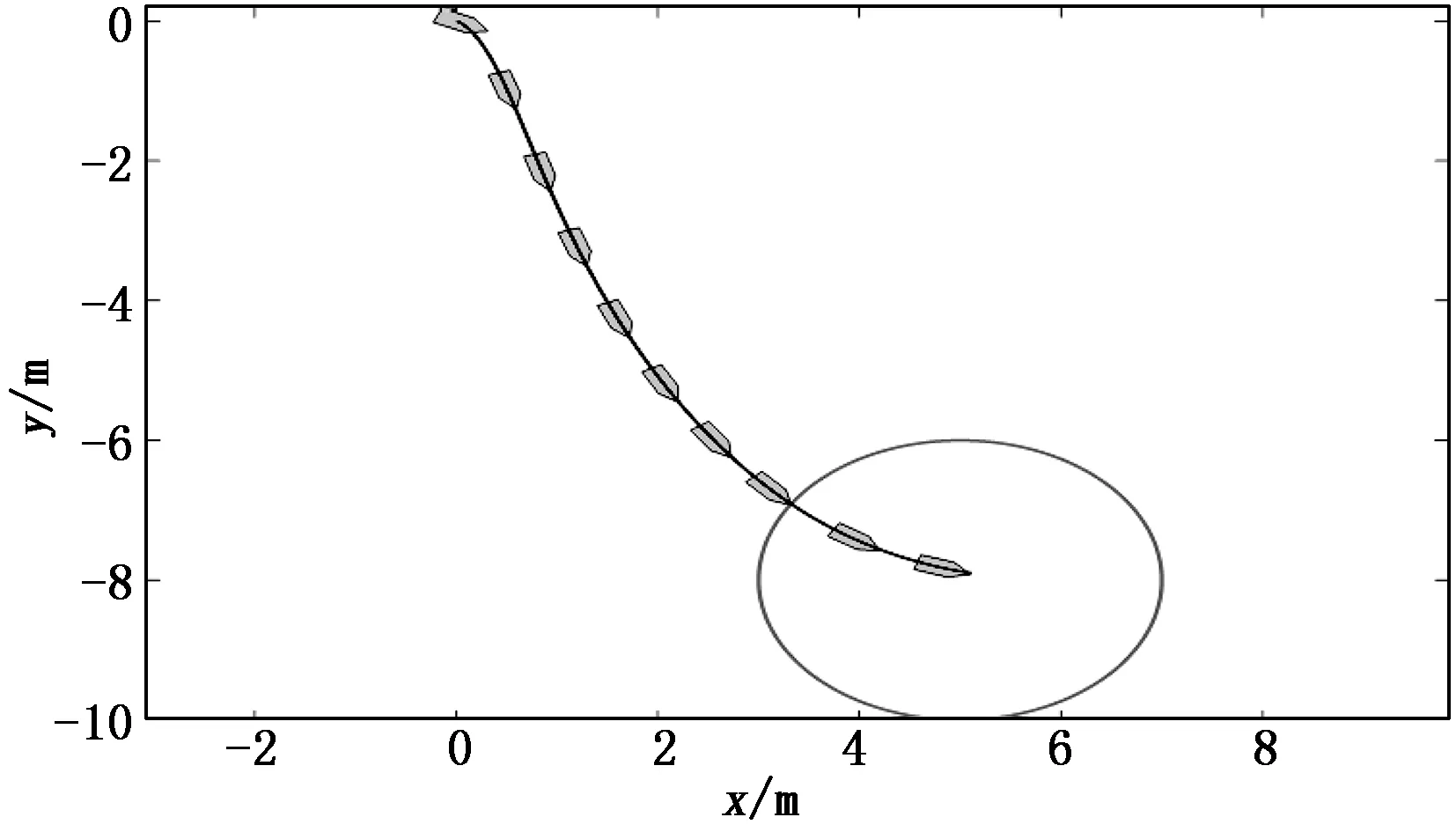
图2 船舶在平面内的运动轨迹
全驱动海洋水面舰船在整个XY平面内的运动曲线如图2所示,可以清楚地观察到,本文所提出的基于RBF神经网络的自适应区域到达控制算法能够快速地使无人模型船很好地趋近并收敛至以目标点为中心的目标空间区域内。
图3表明,船舶的目标势能函数随着时间增加,最终趋近于零,由目标势能函数的性质(1)可知,当势能函数的值为零时,势能函数关闭不再发挥作用,此时船舶已收敛到达至目标区域内,证明了对全驱动海洋水面船舶的区域到达控制得以实现,进一步阐述了该控制算法的有效性。
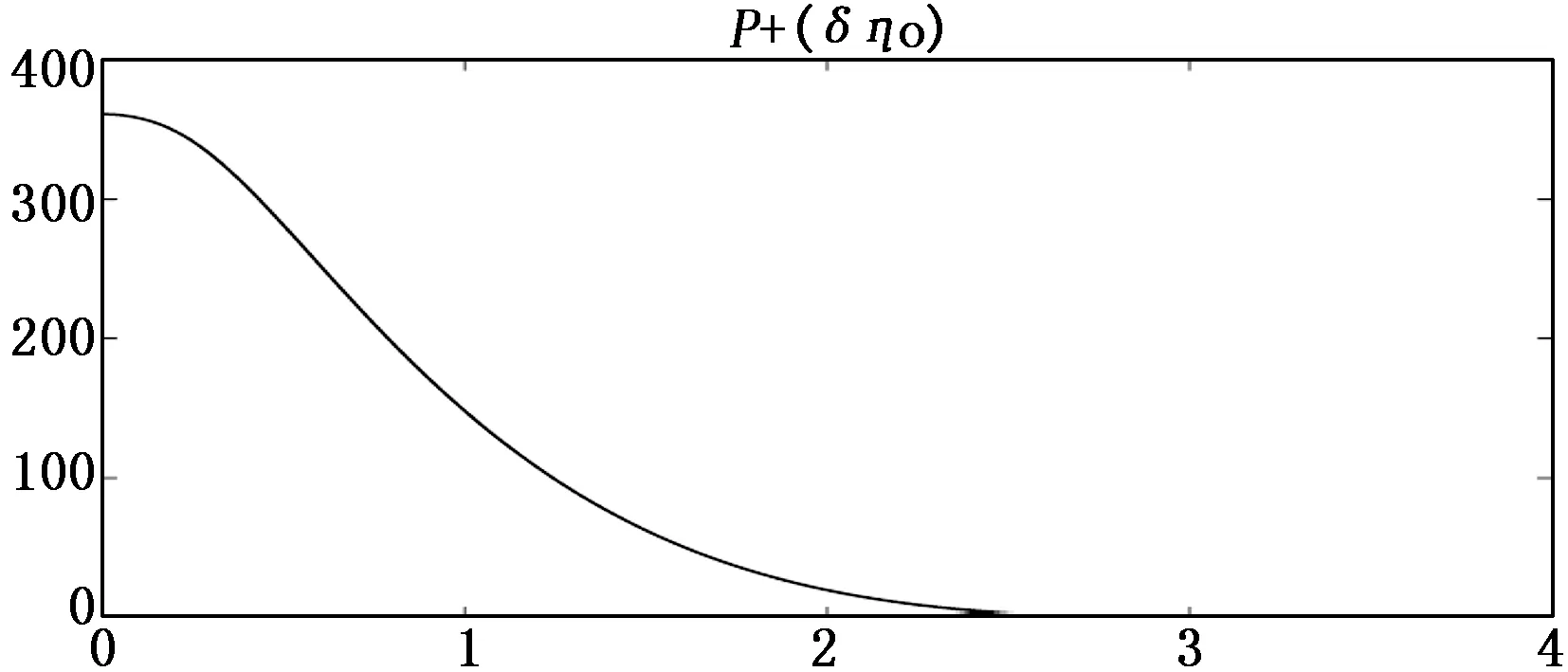
图3 目标跟踪势能函数曲线
4 结论
本文针对三自由度全驱动海洋水面船舶,在考虑了模型不确定和外部环境扰动未知的情况下,提出了一种基于神经网络的自适应区域到达控制算法,综合了RBF神经网络、鲁棒反演技术和李雅普诺夫稳定性理论等方法。选择设计合适的李雅普诺夫函数,通过闭环系统的稳定性分析,证明所有信号都具有一致最终有界性。仿真验证实验结果表明,船舶能够趋近并收敛到达至目标空间区域,所设计的神经网络自适应控制器是简洁并有效的。