基于视觉测量的人防门位置检测方法
2020-04-30贡启明
屈 霞,贡启明
(常州大学 机械工程学院,江苏 常州 213164)
0 引言
随着科技的不断发展,航空航天、导航、跟踪等多个领域都对视觉测量提出了更高的要求,其中姿态测量技术已成为各领域的重要研究方向之一[1]。地铁人防门是根据国家的相关要求建立在地铁隧道中的一种人防工程,大多具有防淹、防爆、防火等作用,主要为战时服务,用于防备空袭、掩蔽人员和物资。平时,地铁人防门都是打开状态,并且大门平行于钢轨的方向,且设计在地铁列车运行的限界之外,正常情况下不会影响到地铁运行。限界是指在保证列车正常安全运行时所需要的一个轮廓空间,具体包括建筑限界、机车车辆限界等等。侵入限界是指非正常打开状态下的人防门侵犯了地铁正常运行的建筑限界和机车车辆限界。2019年1月8日,重庆轨道交通环线海峡路至南湖区间人防门侵入列车行驶区域,致使重庆轨道交通环线列车撞上人防门造成严重的人员伤害事故。为了有效地应对地铁在隧道运行环境中突发的各种安全隐患,相关单位必须深化对地铁隧道设备的安全维护管理,并做到出现异常提前预警,预防事故的发生。目前,地铁隧道人防门的位置检测已经越来越引起人们的重视,成为一项重要的研究课题[2]。
视觉测距作为机器视觉的关键技术,被广泛地应用于目标追踪、构件测量、视觉避障等领域[3],它的优点是精度高,抗干扰,不伤及测量目标,不干扰被测对象自然状态,可在恶劣环境下工作,能更好地适用于地铁人防门区域、处于光照不均匀的复杂环境[4]。
视觉测量系统按传感器数目可分为单目,双目和多目视觉测量。单目视觉测量是指仅利用一台相机或摄像机拍摄单张像片来进行测量工作,因其仅需一台视觉传感器,所以该方法的优点是结构简单、相机标定也简单,同时还避免了立体视觉中的视场小、立体匹配难的不足[5]。目前,视觉测量多用传统相机标定法来实现,该方法无需相机的运动满足特定的条件,并且易于实现,成本低廉,它通过获得的相机内外参数来建立标定物上已知点的坐标与其图像点之间的对应关系,利用一定的算法完成目标物理量的测量。近年来,视觉测量系统在多个领域上取得显著的成果。文献[6]将一个已知直径的标准球体作为标定目标置于机器人上,提出了一种基于球面的TCF方法,利用驱动线结构激光传感器在位置下测量球体中心,通过算法处理获得标定参数,相较于传统TCF标定方法,该方法能够有效地控制标定过程,是一种高效、可靠的标定方法,并且具有耗时短,精度高的特点,可以广泛应用于机器人在线精度提高和碰撞恢复等工业领域。王天宇等[7]设计了一种圆形标定物,通过在自制标定物上提取呈矩形分布的4个特征点,通过求解P4P问题实现空间舱内机器人的视觉定位,该方法具有较高的定位精度和鲁棒性,可应用于对精密测量有需求的场合,但标定物的检测精度和检测算法耗时存在矛盾,且存在漏检、误检的现象。张帆等[8]将现成的人脸作为标定物,选取的3个特征点分别为人脸上的两个瞳孔中心和鼻尖,利用它们作为3个顶点构成一个特征三角形,通过相机内参数进行坐标转化研究了一种基于单目视觉的实时人机测距系统,该系统具有结构简单、无需额外标定物、较高的测量精度、满足实时性的特点,在人机交互系统中具有巨大的应用价值,但随之存在问题是应用场合不广,无法满足大多数视觉测量的领域。
对人防门位置检测方法进行研究,提出了一种基于张氏标定[9]的视觉测量方法,此方法通过制作一张平面黑白棋盘格作为标定物,和三维标定物相比,二维标定物具有制作简单、精度更高、灵活性更强、应用面更广的特点。在人防门背面设置自制的标定物,利用架设在人防门背面和隧道壁之间的相机采集标定物图像,对采集到的图像进行预处理,根据提取的角点得到相机外参数矩阵,在自制标定物的尺寸已知的情况下,可以直接由外参数矩阵获得每个角点的相机坐标,最后利用选取的3个角点作为特征点,通过空间几何知识实现目标物理量的位置检测,实验证明该方法能够满足对人防门位置检测的精度要求,具有一定的应用价值。
1 位置检测原理
人防门位置的检测方法是一种基于单目视觉的运动目标定位算法,即基于针孔成像模型[10],采用尺寸已知的黑白棋盘格作为标定物,根据所提取的角点,利用相机标定原理获得相机外参数矩阵,同时将黑白棋盘格作为靶标使用,被测目标物体上特征点在世界坐标系中的坐标已知,利用标定获得的相机外参数矩阵,根据同一个点在不同坐标系中存在的对应关系,即可直接通过三维坐标转换确定目标物体上的特征点在相机坐标系中的坐标,最后基于提出的数学算法原理,利用空间几何知识完成人防门位置的检测,即当前人防门表面与相机光心间的垂直距离和此时人防门转过的角度值。
1.1 基于外参数的三维坐标转换
在进行视觉测量前需要进行一个重要的准备工作,即合理地定义测量所需用到的相关坐标系,并实现对应靶标特征点之间的坐标转换。对针孔成像模型进行了深入研究并结合视觉测量的坐标元素需求,采用基于外参数矩阵的关键技术和方法来实现世界坐标系和相机坐标系之间对应三维特征点的坐标转换。世界坐标系到相机坐标系的转换过程是基于一个外参数矩阵来实现的,它由一个旋转矩阵R和一个平移向量T来构成。假设空间中存在一点P的坐标为(XW,YW,ZW),它的齐次表示方法为(XW,YW,ZW,1)T,在相机坐标系中齐次表示方法为(XC,YC,ZC,1)T,则它们之间可以通过式(1)进行转换:
(1)

1.2 基于3个空间特征点的距离检测原理
被测目标上的特征点在世界坐标系中的坐标已知,利用基于外参数的三维坐标转换解算出特征点在相机坐标系中的坐标,再根据空间几何知识,通过提出的距离算法原理即可计算得到相机光心相对于被测物的距离。基于3个空间特征点的距离算法原理如图1所示。图中OC为相机光心,OC-XCYCZC为相机坐标系,F为成像平面,P1-P3为棋盘格上选取的3个特征点,d为光心OC到P1-P3构成平面的距离,设特征点Pi(i=1,2,3)在相机坐标系中的坐标为(XCi,YCi,ZCi)。

图1 基于3个空间特征点的距离算法原理
根据图1中四面体OcP1P2P3体积的计算公式,可以得到:
(2)

(3)
其中:
(4)
1.3 基于3个空间特征点的角度检测原理
基于3个空间特征点的角度算法如图2所示。

图2 基于3个空间特征点的角度算法原理

由图2几何关系,可以得到:
(5)
(6)
(7)

(8)
式中,
(9)
(10)
(11)
2 人防门位置检测方法实现
根据隧道地铁人防门所处的周围环境和对人防门当前所处位置的检测需求,提出基于视觉测量的人防门位置检测方法的数学模型:在人防门背面设置黑白棋盘格,在棋盘格平面和隧道墙壁之间架设相机进行图像采集,进一步考虑到当人防门转动角度过大时无法拍摄到棋盘格完整图像和成像质量差的问题,将相机架设在连接人防门和隧道墙壁之间的墙壁上,图像采集所需的目标棋盘格置于门背面一侧靠近门轴处,并调整人防门上棋盘格的高度设置,使其最终所处的位置在拍摄过程中能始终处于相机的视场范围内,如此配置便能尽可能地获得最大的有效量程。基于视觉测量的人防门位置检测数学模型如图3所示,图中,OW-XWYWZW为世界坐标系,它建立在人防门上设置的黑白棋盘格上,以左上角的第一个角点为世界坐标系的原点OW,OC-XCYCZC为建立的相机坐标系,以相机光心OC为其坐标原点,世界坐标系和相机坐标系都为右手坐标系。d和θ为所要检测的相机光心OC到人防门上棋盘格平面的垂直距离和人防门所转的角度。

图3 基于视觉测量的人防门位置检测数学模型
基于视觉测量的人防门位置检测方法实现方案如图4所示。

图4 基于视觉测量的人防门位置检测方法实现方案
将棋盘格作为被测目标,用相机对棋盘格进行图像采集,在计算机中利用Matlab软件完成图像预处理、角点提取、外参数获取、特征点选取、三维坐标转换以及人防门位置目标物理量解算等一系列功能。
在Matlab中首先对采集到的棋盘格图像进行图像预处理,预处理包括图像灰度化和高斯滤波,目的是为之后更上层的操作做准备。目前,图像灰度化的方法主要有分量法、最大值法、平均值法和加权平均法,对各个图像灰度化的方法进行了深入分析,最终采用加权平均法对图像进行灰度化处理,由此方法获得的灰度图最合理,并能提高标定效率和参数标定精度[11],加权平均法的灰度化公式如式(12)所示:
Gray(i,j)=0.30R(i,j)+0.59G(i,j)+0.11B(i,j)
(12)
式中,(i,j)表示图像中的某一个像素点,R,G,B分别表示该点的红、绿、蓝3个颜色分量数值,将它们通过与对应的系数相乘,之后相加即可得到该点的灰度值Gray。
接着对得到的灰度图像进行高斯滤波处理,降低图像采集时因视场不够明亮、光照不够均匀而产生的噪声,以此来提高图像的质量。进行位置检测前,首先将棋盘格作为标定物使用,根据棋盘格上提取的角点得到相机外参数矩阵,进一步将棋盘格当作靶标来使用,通过在棋盘格上任意选取3个角点作为靶标特征点,利用三维坐标转换原理实现特征点的相机坐标获取,最后基于距离和角度的检测原理求出人防门所处的位置参数。
3 人防门位置检测方法实验验证
3.1 标定物和视觉测量相机的选取
实验所用标定物为Visio自制的黑白棋盘格,尺寸为240 mm×180 mm,由12×9个边长为20 mm的小方格构成。对图像的采集选用SONY厂商生产的相机,型号为DSC-W200,相机的分辨率为25921944,拍摄图像时的焦距为15 mm。
3.2 相机外参数的标定
相机外参数的获取利用Matlab自带的Camera Calibrator应用来完成,通过将预处理过的图像导入此应用,便可直接完成角点的提取和外参数矩阵的获取。由于该应用是基于极大似然估计法进行相机内外参数的求解,因此样本容量越大,标定结果越精确。本实验中对20张待测图像进行处理分析,其中包含真图像10张,为人防门在转动过程中用相机连续拍摄棋盘格得到,是最终距离和角度测量结果的直接来源,假图像10张,是在焦距不变的情况下从不同角度拍摄棋盘格得到,主要作用是使标定得到外参数结果更为精确。
3.3 靶标特征点的世界坐标选取
将棋盘格作为视觉测量系统的靶标使用,以棋盘格左上角的第一个角点作为世界坐标系的原点OW,XW轴与棋盘格的长边平行,YW轴与棋盘格的短边平行,即将世界坐标系的XW-YW平面建立在棋盘格平面上,ZW轴垂直于棋盘格平面,这样建立的世界坐标系不仅能使棋盘格上特征点的第三维坐标为0,方便计算和处理,且能与相机标定获得的外参数矩阵相对应。由于棋盘格的尺寸已知,每一个黑白棋盘小方格的长度为20 mm,由此选取的棋盘格上3个特征点的世界坐标分别为P1(160,20,0),P2(40,20,0),P3(100,140,0)。
3.4 实验结果分析
本实验总共进行了人防门所处10个位置的距离和角度的检测,通过在人防门背面设置黑白棋盘格作为视觉测量系统的靶标,当门由原来正常打开的位置朝关闭的方向转过的角度为0°、5°、10°、15°、20°、25°、30°、35°、40°、45°时,用架设好的相机分别在人防门处于对应位置时进行图像的连续采集。
实验中相机采集到的棋盘格初始位置和末端位置图像如图5所示,根据在每一副图像中棋盘格上选取的3个固定的靶标特征点,利用基于外参数的三维坐标转换原理获得对应特征点在相机坐标系中的坐标,最后通过基于3个特征点的距离和角度算法原理完成人防门位置目标物理量的参数检测。

图5 棋盘格采集图像
3.4.1 距离结果检测
基于3个空间特征点的人防门距离检测结果如表1所示。

表1 人防门距离检测结果 mm
根据表1的检测结果,在Matlab软件中绘制人防门距离测量值与实际值的对比曲线,如图6所示。
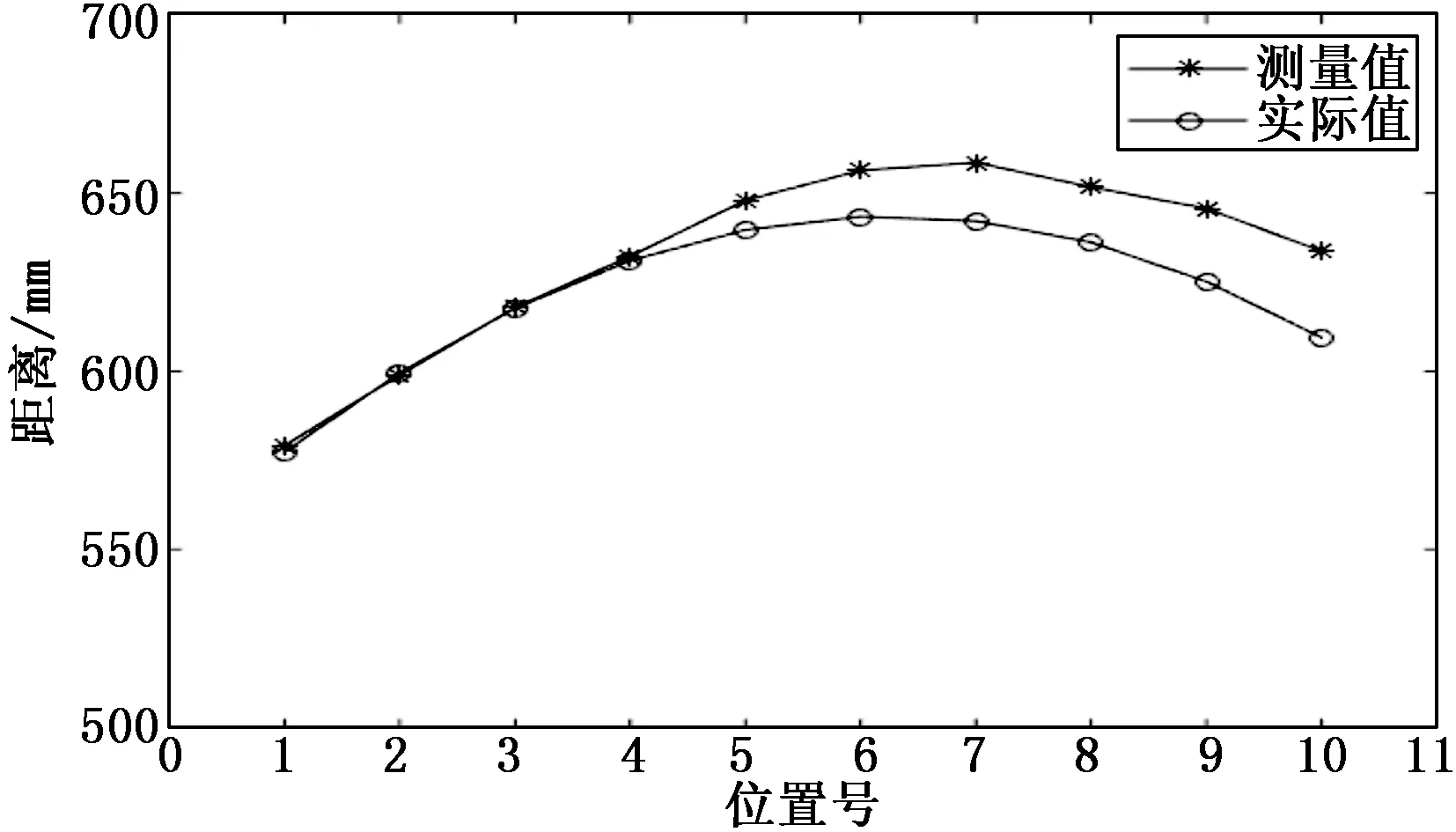
图6 人防门距离测量值与实际值对比曲线
从表1和图6的检测结果中可以看出,在设定的实验范围内,当人防门转过的角度在15°以内时,基于视觉测量的人防门距离检测的误差较小,基本与实际值吻合,最大误差为1.8 mm,最小误差仅为1.2 mm,展现出较好的精确性和鲁棒性,当转动角度超过15°时,距离检测的误差随着位置的改变而不断增大,并明显偏离实际值,达到的最大误差为24.2mm。
3.4.2 角度结果检测
基于3个空间特征点的人防门角度检测结果如表2所示。

表2 人防门角度检测结果 (°)
根据表2的检测结果,在Matlab软件中绘制人防门角度测量值与实际值的对比曲线,如图7所示。

图7 人防门角度测量值与实际值对比曲线
从表2和图7可以看出,在设定的实验范围内,基于视觉测量的人防门角度检测的测量值与实际值非常接近,最大误差为0.93°,最小误差只有0.04°,测量精度较为准确,验证了算法的可行性,能很好地满足人防门角度测量的精度需求。
3.4.3 距离和角度检测精度分析
从距离误差与角度误差的相对大小来看,角度的精度要优于距离的精度。经过对比棋盘格在不同位置的拍摄图像和对目标物理量的求解算法分析可知,造成这种定位精度差异的原因有三点:一是实际测量环境所导致的,当人防门在转动过程中时,棋盘格在不同位置时受到的隧道灯光照射的光照强度不均匀,转动角度越大,受到的光照越强,这会对测量结果产生一定的影响;二是在人防门转动的过程中,标定板在图像中由中央不断往图像的边缘位置移动,这会造成误差不断扩大;三是距离的求解公式(3)由加法组成,这会造成误差的累积,而角度的求解公式(8)由除法组成,这对误差的抑制起到了一定的作用。
3.5 相对误差分析
图8和图9分别表示距离相对误差与角度相对误差随角度的变化曲线。从图8中可以看出,距离的相对误差随着角度的增大出现增大的趋势,从图9中可以看出,角度的相对误差随着角度的变化并没有出现显著的变化规律。在设定的实验范围内,距离的相对误差在4%以内,角度的相对误差在5%以内,验证了算法的有效性,能较好地满足人防门位置物理量的检测精度需求。

图8 距离相对误差与角度变化的关系曲线图

图9 角度相对误差与角度变化的关系曲线图
4 结束语
基于隧道地铁行车时的安全需求,提出了一种基于视觉测量的门位置检测方法,通过相机对置于人防门上的标定物进行图像采集,利用Matlab软件在张氏标定的基础上对图像进行处理和计算,得到最终所要检测的人防门位置参数。实验结果证明了该方法能较好地满足人防门位置测量精度的要求。