广义时滞系统的稳定性条件
2020-04-29于姗姗
于姗姗
(沈阳师范大学 数学与系统科学学院,辽宁 沈阳 110034)
0 引言
时滞现象在实际系统中是普遍存在的,时滞的存在通常会造成系统不稳定,影响系统的整体性能.在各类工业系统中都含有时滞,例如:涡轮喷气式飞机、核反应堆、轮船定向仪、无损耗传输系统等.时滞系统稳定性的研究取得了大量研究成果[1-8].
广义系统是一类形式更一般化,比正常系统更具有广泛形式和应用背景的动力系统[9-15].20世纪70年代广义系统的理论被提出,许多正常系统的结论被相继地推广到广义系统中.系统奇异矩阵的存在会使系统产生脉冲,可能造成系统瞬间崩溃,这是研究广义系统稳定性必须考虑的问题.因此,研究连续广义系统的稳定性,首先要保证系统的正则性和无脉冲性,再考虑稳定性.
通过适当的模型变换,利用中立系统变换方法来处理广义时滞系统,为求得广义时滞系统稳定性提供了新方法[12-14].文献[12-13]提出将广义时滞系统转化为中立时滞系统,进而研究了广义时滞系统的稳定性问题.文献[14]也通过此模型变换,利用自由矩阵积分不等式,处理了广义时滞系统的稳定性问题,减小了结果的保守性.
在研究时滞系统稳定性条件的过程中,较为常用的方法是L-K泛函法,比如引入三重积分项到L-K泛函[12-13]、增广的L-K泛函[14-15]等.在处理泛函产生的积分项上,应用积分不等式方法较为广泛,对于处理泛函导数中的一重积分项,由Jensen积分不等式[1]发展到了Wirtinger积分不等式[2],辅助函数积分不等式[3],进而又用到B-L积分不等式[4].与前3个积分不等式相比,B-L积分不等式的保守性更小,具体说明见文献[4].
笔者通过中立模型转换法,将广义时滞系统转化为等价的中立时滞系统.提出增广的L-K泛函,然后对泛函求导,利用四阶B-L积分不等式更精确地对求导后的积分项进行放大,得到保守性更小的中立时滞系统稳定性充分条件,进而得到广义时滞系统的稳定性充分条件.最后,两个数值算例表明笔者所获得方法的有效性和优越性.

1 问题描述
考虑如下连续广义时滞系统:
(1)
其中,x(t)∈Rn为系统状态向量,Rn是定义在实数域上的n维向量空间,h>0表示定常时滞,φ(t)∈R是连续的向量值初始函数.矩阵E∈Rn×n,且rankE=r≤n.A,Ad为已知适当维数的常数矩阵.
定义1[9]若det(sE-A)≠0,则称矩阵对(E,A)是正则的;若deg det(sE-A)=rank(E),则称矩阵对(E,A)是无脉冲的.
定义2[11]若矩阵对(E,A)是正则、无脉冲的,则称广义时滞系统(1)是正则、无脉冲的.
引理1[9]如果矩阵对(E,A)是正则、无脉冲的,则存在两个非奇异矩阵M∈Rn×n和N∈Rn×n使得下式成立:
其中矩阵A1∈Rr×r.
首先将系统(1)转化成一定约束下的中立型系统.根据引理1,如果(E,A)是正则、无脉冲的,一定存在两个非奇异矩阵M∈Rn×n和N∈Rn×n,使得
(2)
(3)
其中(3)中矩阵分块与(2)中矩阵分块方式相一致.u1(t)、u1(t-h)为r维列向量,u2(t)、u2(t-h)为n-r维列向量.所以,系统(1)等价于
即
(4)
0=u2(t)+Ad3u1(t-h)+Ad4u2(t-h) .
(5)
对(5)求导,可得
(6)
联立(5)和(6),得
(7)
联立(4)和(7),得
系统(1)可表述成如下的形式:
(8)
其中

引理2[11]如果矩阵对(E,A)是正则、无脉冲的,系统(1)是无脉冲的并且解存在,且在[0,∞).

其中:

2 主要结果
定理1 对于给定参数h>0,系统(6)是稳定的.若存在正定矩阵P∈R6n×6n,正定矩阵Q,R,S∈Rn×n,满足下面线性矩阵不等式
Φ=sym{ΓT1PΓ2}+eT1Qe1-eT3Qe3+eT0Re0-eT2Re2+h2eT0Se0-ΓT3SΓ3- 3ΓT4sΓ4-5ΓT5SΓ5-7ΓT6SΓ6-9ΓT7SΓ7<0 .
(9)
其中:
证明为系统(8)选择如下形式的L-K函数:
V(u(t))=V1(u(t))+V2(u(t))+V3(u(t))+V4(u(t)) ,
为了方便记
沿着系统(8),关于t对V(u(t))求导数,得
(10)
(11)
(12)

即
(13)
根据(10)~(13),整理得
(14)

注释1 在处理广义时滞的稳定性时,常出现半正定项ETSE,使得稳定性条件难以表述成严格的线性矩阵不等式形式.中立系统变换方法避免了这个问题,为获得广义时滞系统的稳定性条件提供了新思路.

3 数值算例
本节用2个数值例子来说明本文方法的有效性和优越性.
例1 考虑如下广义时滞系统[16]:

根据定理1,得
例2 考虑如下中立型时滞系统[8]:
其中,c为参数.利用定理1,并用MATLAB的LMI工具箱求解,通过2个数值例子算出系统允许最大时滞hmax,与已有文献相比的结果分别列在表1、表2中,可以看出,本文方法具有更小的保守性.
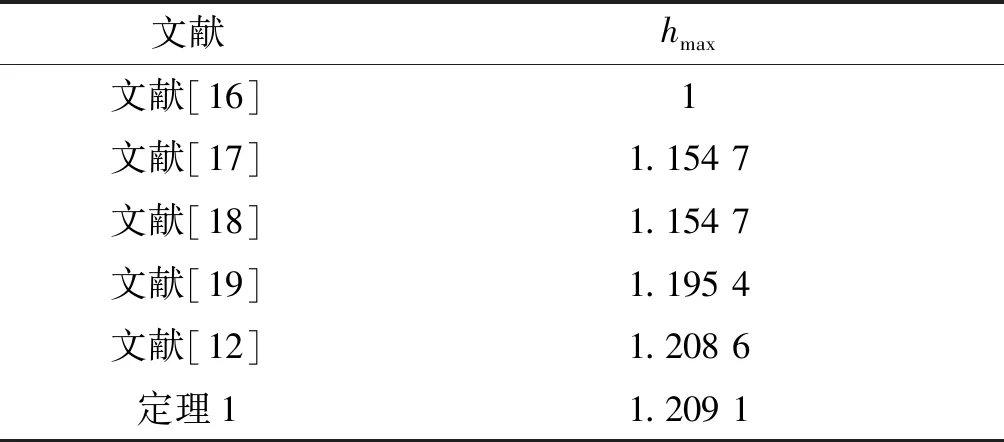
表1 比较广义时滞系统允许最大时滞hmax
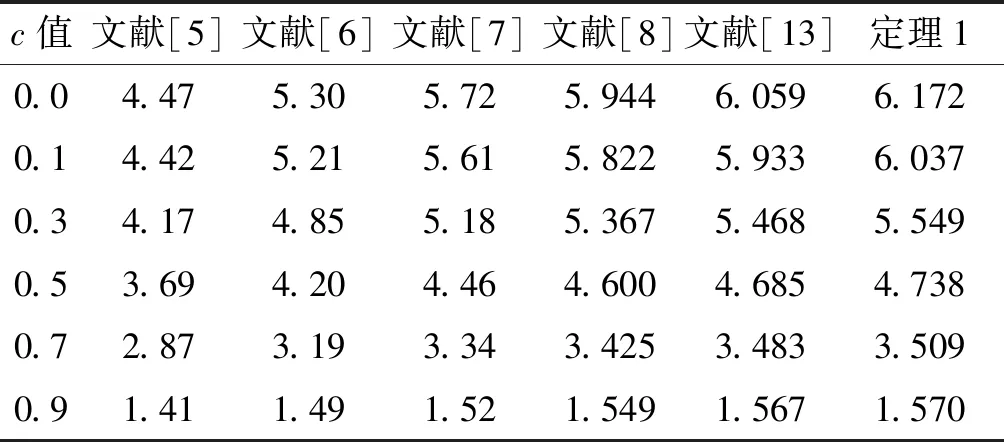
表2 比较中立时滞系统允许最大时滞hmax
4 结论
笔者利用中立系统变换方法,研究了广义时滞系统的稳定性问题.选取了增广的L-K泛函,在处理积分项时利用了B-L积分不等式,给出了新的稳定性条件判据.而在文献[12]和[13]中,采用了Wirtinger积分不等式(具体见文献[2])来处理求导后积分项,相比之下,笔者采取的四阶B-L积分不等式更能精确地对求导后积分项进行放大,因此,该方法适当地降低了保守性.最后用2个数值例子表明,此方法在处理广义时滞系统和中立时滞系统的稳定性上,更具有优越性.
