分布式遗传的船舶航向神经网络优化控制
2020-04-28邓华王仁强胡甚平缪克银杨永前
邓华 王仁强 胡甚平 缪克银 杨永前


摘要:针对海上风浪环境对船舶航行的干扰,利用遗传神经网络优化算法设计船舶航向控制器。利用分布式遗传算法(distributed genetic algorithm,DGA)并结合模拟退火算法对常规遗传算法(genetic algorithm,GA)进行改进。利用改进的GA对径向基函数(radical basis function,RBF)神经网络进行优化。利用优化的RBF神经网络对系统不确定项进行逼近,并对控制输入进行补偿实现抗饱和控制。利用三阶干扰观测器对外部扰动实时跟踪并反馈到滑模控制器(sliding mode controller,SMC)设计中。借助SMC设计并结合李雅普诺夫稳定性理论推算出船舶运动控制律,实现船舶运动优化控制。通过实验验证了本文设计的控制器性能较现有的模糊PID控制器和神经网络SMC优越,系统达到稳定的时间短,平均超调量小。
关键词: 船舶运动; 优化控制; 径向基函数(RBF)神经网络; 分布式遗传算法(DGA); 输入饱和
Abstract: Aiming at the interference of the sea wind and wave environment on ship navigation, a ship course controller is designed by the genetic neural network optimization algorithm. The distributed genetic algorithm (DGA) and the simulated annealing algorithm are used to improve the conventional GA. The improved GA is used to optimize the radical basis function (RBF) neural network. The optimized RBF neural network is used to approximate the uncertain items of the system, and the control input is compensated to realize the anti-saturation control. The third-order disturbance observer is used to track the external disturbance in real time and feed it back to the design of the sliding mode controller (SMC). With the help of the design of SMC and the Lyapunov stability theory, the ship motion control law is derived to realize the ship motion optimal control. Experiments show that the controller designed in this paper is of better performance than the existing fuzzy PID controller and the neural network SMC, the stability time of the system is shorter, and the average overshoot is smaller.
Key words: ship motion; optimal control; radical basis function(RBF) neural network; distributed genetic algorithm (DGA); input saturation
0 引 言
航向跟踪控制是船舶运动和控制领域的重要研究之一。它与船舶航行的经济性和安全性[1-2]有关。目前,船舶航向控制以比例积分微分(proportional integral derivative,PID)控制[3]或自适应控制[4]为主,但这两种控制均不能真正地解决海上风浪频繁干扰问题和船舶非线性问题。具有模糊模型或自适应参数调整的改进型PID控制可以适应参数变化并减少控制抖動[5]。
一些新的控制理论方法不断地应用于船舶航向控制,如李雅普诺夫稳定性理论和方法[6]、滑模控制[7]以及以模糊逻辑系统[5]和神经网络[8-9]为代表的智能控制技术。
神经网络系统[10]的最重要特征是具有自组织和自学习功能,并具有实时处理大规模并行信息的能力,因此可以有效地解决船舶运动模型的不确定性[4]。融合径向基函数[8,10](radical basis function,RBF)神经网络的滑模控制器(sliding mode controller,SMC)可以有效地应用于具有不确定性的非线性系统(如船舶运动控制系统)的稳定、快速控制。值得注意的是,神经网络用于运动系统的建模和控制的关键是确定神经网络的结构和连接权重系数[10]。对于最典型的RBF神经网络,连接权重和阈值等参数的设定主要取决于经验,因此很容易陷入局部极值[10]。另外,设计控制器时还要考虑船舶控制输入(转向角输入的饱和度)受限[11]和外部干扰两个问题。
本文通过基于RBF神经网络的内部辅助补偿机制,引入抗饱和控制理论和技术,同时结合扩张观测器克服外部干扰[12];利用分布式遗传算法(distributed genetic algorithm,DGA)和模拟退火(simulated annealing,SA)算法对常规遗传算法(genetic algorithm,GA)进行改进,将改进的GA和RBF神经网络融入SMC中,设计出具有输入饱和度的船舶运动抗干扰智能控制器。
1 基本方法
1.1 具有输入饱和度的船舶运动模型
船舶运动模型有很多类型。常见模型包括整体模型、独立模型和响应模型[13]。本文选择响应模型来设计船舶运动控制器:
因此,本文的目的是在外部干扰、船舶模型存在非线性和不确定性及船舶系统输入受限的情况下,设计一种智能化程度高的船舶运动控制器。
1.2 基于RBF神经网络的抗饱和设计
采用抗饱和控制技术解决输入受限的问题。为提高抗饱和性能,采用RBF神经网络进行内部辅助补偿[14],见图1。由图1可知:船舶模型状态变量的期望值为xd;控制器输出为v;舵机伺服系统的抗饱和补偿为u=v+δ;网络输出δ^为输入饱和补偿δ的估计值。
1.3 外部干扰观测器
通过扩张观测器[14]对外部干扰进行实时跟踪估计,并反馈到SMC设计中,可以减少由外部干扰引起的控制抖动。三阶干扰观测器设计如下:
2 RBF神经网络的优化
2.1 改进GA
RBF神经网络应用前需要确定网络参数,以保证网络的高逼近性能,否则网络很容易陷入局部极值问题[10],从而导致控制抖动。本文将GA用于优化RBF神经网络参数,将其有效地应用于船舶运动控制系统的设计中。
针对标准GA的不足,本文采用DGA。总种群分为几个子群,每个子群独立进行遗传优化。各子群间定期将优良的个体按一定比例进行迁移,以确保各子群共享良好的基因模式,并防止某些子群向局部最优方向收敛。每个子群具有不同的基因模式,并且其遗传过程具有相对独立的进化空间,因此它们各自的进化方向是不同的,这确保了搜索的充分性和全局最优收敛结果。
2.1.1 基于SA算法的适应度修正
当使用经典轮盘赌方法选择个体时,适应性较高的个体被连续选入下一代,而适应性较低的个体被丢弃,从而导致后代与前代之间的差异很小。在遗传早期易产生早熟问题,而在遗传后期易产生进化停滞现象。使用SA算法可以改善此问题。
在遗传进化初期设定较高的温度,此时具有相似适应性的个体产生后代的可能性也相似。在遗传进化过程中,随着温度逐渐降低,先前相似个体之间的差异会被放大,从而使杰出个体的优势明显。
2.1.2 变异概率的改进
自适应变异概率可以根据遗传进化同步更新。自适应变异方法可以用于在发生过早收敛时自动增加变异概率,从而扩大搜索空间。
2.2 基于改进GA的RBF神经网络优化
将带有SA算法的DGA用于确定RBF神经网络的参数。RBF神经网络的遗传优化过程见图2。将遗传优化算法与RBF神经网络计算融合在一起,可以实现闭环在线寻优,一次性完成寻优过程。
3 基于滑模控制的航向控制实现
将上述基于SA算法的DGA优化的RBF神经网络应用于船舶运动智能控制设计。利用优化后的RBF神经网络对船舶不确定项进行逼近,以及对控制输入进行补偿,实现抗饱和控制。进一步利用三阶干扰观测器对外部扰动实时跟踪并反馈到SMC设计中。然后借助SMC设计并结合李雅普诺夫稳定性理论推算出船舶运动控制律,实现船舶运动智能控制。
利用滑模控制技术设计智能控制器,定义如下滑模函数:
4 实 验
4.1 实验条件与数据
以文献[11]中的无人水面艇(unmanned surface vessel,USV)为例开展实验。实验中三阶干扰观测器的设计参数为:λ=0.05,k1=6,k2=11,k3=5。SMC设计参数为:c1=5,c2=15,η=0.1。网络自适应参数为:γ1=15,γ2=15。GA进化总代数为150;子群数量为5;遗传交叉算子为pc=0.85;变异算子参数pmh=0.5,pml=0.04;SA算法参数T0=100 ℃,Ta(t)=10 ℃。
4.2 性能验证
在实验过程中,当优化过程执行次数超过7时,优化过程趋于收敛。为便于数据计算,进行了奇数次实验。图3为截取的前9组实验数据。与GA相比,DGA优化过程收敛更快,目标函数值更小。如表1所示:GA优化的目标函数的平均值为959.22,平均值与中位数的比值为1.006;DGA优化的目标函数的平均值为795(比GA的平均值小17.12%),平均值与中位数的比值为0.978(比GA的平均值小2.78%)。
表2为在各种实验条件下船舶运动控制的具体结果。航向变化实验中,一阶响应模式用于执行跟踪实验,振幅为30°,实验初始值为0°,无干扰;模型摄动实验与航向变化实验的区别在于系统参数中增加了扰动项,USV的参数值受到了40%的扰动;正弦干涉实验与航向变化实验的区别在于增加了外部正弦波干扰,系统输出受到振幅为2°、频率为0.1 rad/s正弦波的干扰;白噪声干扰实验与正弦干涉实验的区别在于外部干扰改为白噪声,系统输出受到幅度为0.1的白噪声干扰;复合干扰实验与航向变化实验的区别在于增加了复合外部干扰,USV的参数值受到40%的干扰,且系统输出受到幅度为0.1的白噪声干扰。控制性能指标满足了工程设计要求,验证了智能控制算法的有效性和实用性。
4.3 对比实验
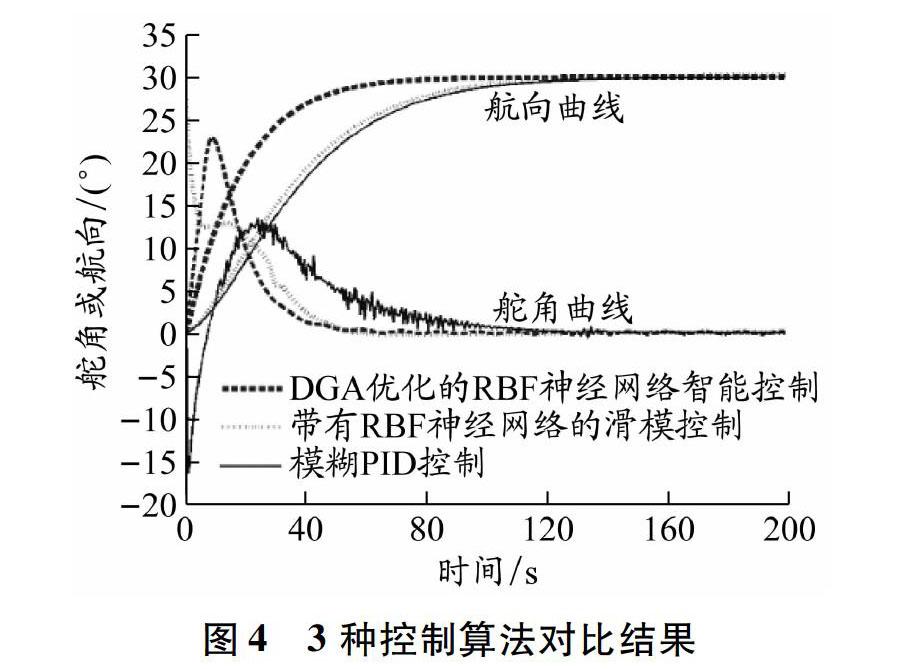
通过与文献[3]和文献[11]提出的两种控制算法进行比较,可以验证本文设计的智能控制算法的先进性。实验初始航向为0°,跟踪航向为30°,外界风浪干扰近似用白噪声随机干扰替代,轨迹跟踪对比实验结果见图4,控制参数对比见表3。
4.4 结果比较与验证
从表3可以看出,模糊PID控制的稳定时间约为140 s,带有RBF神经网络的滑模控制的稳定时间约为125 s,本文设计的智能控制的稳定时间约为105 s。与模糊PID控制和带有RBF神经网络的滑模控制相比,本文设计的智能控制更加先进,系统达到稳定的时间更短,平均超调量更小。可以看出,由DGA优化的RBF神经网络的逼近速度更快。
在工程实践中,抖振越弱,控制系统就越稳定和可靠。因此,DGA優化的RBF神经网络智能控制算法的控制性能是最好的。
由图4可知:文献[3]中不采用抗饱和技术的模糊PID控制输出最初达到35°,经过一定时间后离开饱和区,抖振较大;文献[11]中带有RBF神经网络的滑模控制输出在开始时就离开了饱和区,经过小幅振荡后达到了控制效果,抖振较小;本文设计的智能控制的最大控制输入小于25°,达到了快速控制的效果,抖振微弱,达到稳定需要的时间也最短。因此,在相同的外界干扰下,DGA优化的RBF神经网络智能控制算法的稳定时间最短,且抖振最弱。
5 结 论
分布式遗传算法(DGA)能够保证搜索的充分性和全局最优收敛结果。将带有模拟退火(SA)算法的DGA应用于径向基(RBF)神经网络的参数优化以提高逼近性能。结合RBF神经网络及干扰观测器,利用滑模控制方法设计了船舶运动智能控制算法。实验结果表明,DGA优化的RBF神经网络智能控制算法比模糊比例积分微分(PID)控制算法和带有RBF神经网络的滑模控制算法更有效。需要说明的是,本文未考虑船舶惯性大造成的输出延迟问题,今后将针对该问题进行进一步探讨。
参考文献:
[1]MA Liyong, XIE Wei, HUANG Haibin. Convolutional neural network based obstacle detection for unmanned surface vehicle[J]. Mathematical Biosciences and Engineering, 2019, 17(1): 845-861.DOI: 10.3934/mbe.2020045.
[2]沈海青. 基于强化学习的无人船舶避碰导航及控制[D]. 大连: 大连海事大学, 2018.
[3]冯永孝, 张显库. 基于非线性修饰模糊PID的船舶航向保持控制[J]. 船舶工程, 2018, 40(S1): 202-205.DOI: 10.13788/j.cnki.cbgc.2018.S1.202.
