基于径向基函数神经网络的船舶航迹自抗扰控制
2020-04-28赵顺利李伟张文拴
赵顺利 李伟 张文拴

摘要:针对常规非线性自抗扰控制(nonlinear active disturbance rejection control,NLADRC)技术在船舶航迹控制中存在的参数整定难、抗干扰能力差的问题,搭建船舶三自由度MMG数学模型,设计船舶航迹NLADRC系统。利用径向基函数(radial basis function,RBF)神经网络对系统进行辨识,使网络输出逼近系统输出。根据辨识信息自适应整定对系统整体控制效果影响较大的两个参数,提出基于RBF神经网络的船舶航迹NLADRC系统。仿真结果表明,参数的自适应整定能加快系统收敛速度,大幅减小超调量,对外界环境具有更强的鲁棒性。神经网络对NLADRC的优化,使其控制性能得到提升。
关键词: 船舶航迹控制; 非线性自抗扰控制(NLADRC); 神经网络; MMG模型
Abstract: In view of the problem of difficult parameter tuning and poor anti-interference ability of the conventional nonlinear active disturbance rejection control (NLADRC), a ship three-degree-of-freedom MMG mathematical model is established, and a ship trajectory NLADRC system is designed. The radial basis function (RBF) neural network is used to identify the system so that the network output approximates the system output. According to the identified information, the two parameters that have great influence on the overall control effect of the system are adjusted adaptively, and a ship trajectory NLADRC system based on RBF neural network is proposed. The simulation results show that the adaptive tuning of parameters can accelerate the convergence speed of the system, greatly reduce the overshoot, and have stronger robustness to the external environment. The NLADRC optimization by the neural network improves the control performance.
Key words: ship trajectory control; nonlinear active disturbance rejection control (NLADRC); neural network; MMG model
0 引 言
船舶航跡控制一直都是造船界的重点和难点问题,从早期的PID控制发展到后来的自适应控制、鲁棒控制等,经历了一次又一次的伟大变革。然而,由于船舶的大惯性、大时滞、非线性以及外界环境复杂多变等特点[1],一直没有达到理想的航迹控制效果。韩京清[2]提出的自抗扰控制(active disturbance rejection control, ADRC)为解决控制问题提供了新的思路,将ADRC应用到船舶航迹控制并进行深入研究具有重要的实际意义。
文献[3-4]对控制论的基本原理、本质问题和控制论的范式进行了梳理和反思,探讨了ADRC的内涵和意义;文献[5]采用ADRC实现了船舶航向的跟踪控制,但是其控制参数不易整定;文献[6]将BP神经网络引入PID控制参数整定算法,并证明了算法的优越性;文献[7]引入径向基函数(radial basis function, RBF)神经网络,利用其逼近任意非线性函数的特点实时调整PID控制参数,实现船舶的航向跟踪;文献[8]提出一种动态干扰解耦控制策略,将船舶航迹控制转化为船舶横向和纵向误差控制;文献[9]提出一种航段跟踪策略,实现了根据船舶当前位置确定接下来要跟踪的航段的目标;文献[10]将基于RBF神经网络的ADRC应用到船舶航向控制,证明了算法的可行性和优越性;文献[11]设计了气垫船的神经网络ADRC系统,提升了常规ADRC系统的控制效果。本文采用MMG船舶运动数学模型,将船体、螺旋桨和舵各自的单独性作为基准,尽量合理地表达作用于船体上的流体动力。通过构造期望船首向角,将航迹控制转化为跟踪期望船首向角的航向控制问题,设计基于RBF神经网络的船舶航迹非线性ADRC(nonlinear ADRC, NLADRC)系统;利用RBF神经网络对系统进行辨识,使网络输出逼近系统输出;根据辨识信息自适应整定对系统整体控制效果影响较大的两个参数,实现了基于RBF神经网络的NLADRC系统对欠驱动水面船舶的航迹控制。
1 MMG船舶运动数学模型
船舶运动数学模型分为整体型模型、分离型模型和响应模型等3种,其中分离型模型主要是指MMG模型[12-13]。本文使用的就是基于MMG理论建立的船舶三自由度运动模型(垂荡、纵摇和横摇运动对水平面运动影响很小,忽略不计)。模型如下:
2 船舶航迹NLADRC系统设计
2.1 航迹间接控制方法——构造期望船首向角
船舶在海上的航行环境复杂,因外界风、流等的干扰会存在风流压差角。为使船舶航行在计划航迹上,构造期望船首向角[14]ψd,使船舶航向跟踪ψd,从而达到航迹跟踪的目的。
所构造的期望船首向角方程能够将航迹偏差收敛于0,实现航迹跟踪。证毕。
2.2 NLADRC技术
NLADRC[15]是经典PID控制理论与现代控制理论的结合,分为3部分:跟踪微分器(tracing differentiator,TD),用来实现微分信号的可靠获取,安排过渡过程以减少给定突变引起的系统大幅度超调;扩张状态观测器(extended state observer,ESO),用来估计系统总扰动;非线性状态误差反馈控制(nonlinear state error feedback control,NLSEF),用来改进控制效果。
2.2.1 TD
以ψd为输入信号,设计如下TD对目标信号进行跟踪:
3 基于RBF神经网络的NLADRC系统设计
NLADRC系统参数众多,特别是非线性组合中的β1、β2对控制效果影响显著,本文利用RBF神经网络在线优化这两个参数。
3.1 RBF神经网络
RBF神经网络[16]是三层前馈式网络,其拓扑结构见图1。第一层为输入层,用于连接外界环境;第二层为隐含层,用于从输入空间到隐含层空间的非线性变换;第三层为输出层,用于对隐含层的输出进行线性组合。
3.2 利用RBF神经网络优化船舶航迹NLADRC系统
利用RBF神经网络优化的船舶航迹NLADRC系统结构见图2。
4 仿 真
以某教学实验船为仿真对象,该船的参数为:船长126 m,宽20 m,满载吃水8 m,方形系数0.681,螺旋桨半径2.3 m。相应的船舶水动力参数求取方法参照文献[10]。期望船首向角ψd(式(2))中的参数取b1=0.05,b2=1.5,b3=0.01。TD参数取r0=30,h0=0.05;ESO参数取β1=100,β2=300,β3=1 000,d=0.002 5,r1=0.5,r2=0.25,b=0.002 2;NLSEF参数取α1=0.75,α2=1.5,β1=10,β2=0.3;RBF神经网络参数取η1=0.7,η=0.5,α=3.5。仿真过程中设定船舶初始航速7 m/s,风速5 m/s,风向西南,流速2 kn,流向东北。在以上条件下进行直线和曲线航迹控制仿真。
4.1 直线航迹控制仿真
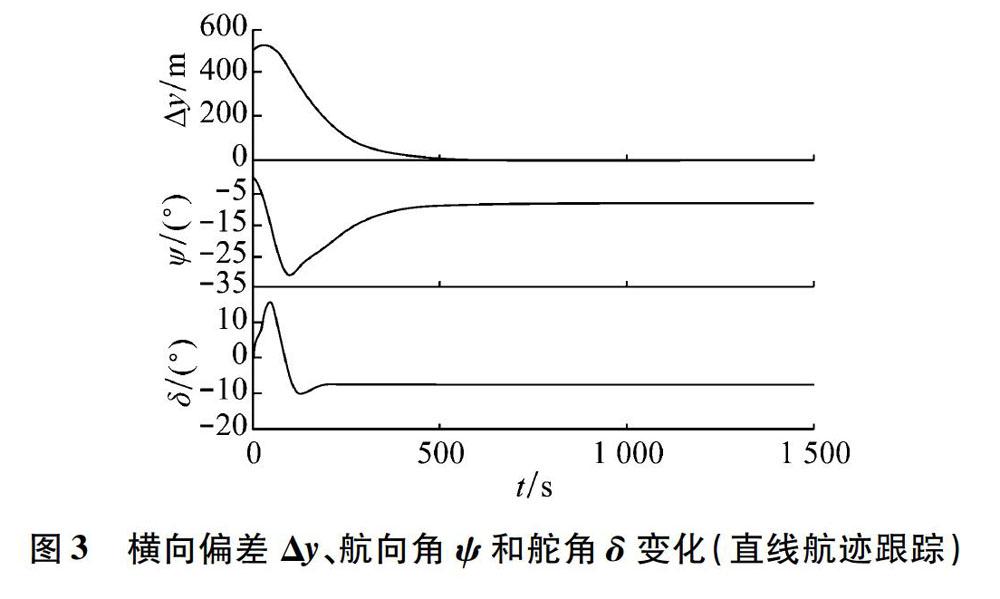
设船舶的初始位置为(0, 530 m), 航向角为0°,跟踪轨迹为yd=0,仿真结果见图3。
由仿真结果可知:在风和流的干扰下,船舶航迹由横向偏差530 m收敛到计划航迹仅需570 s,收敛曲线光滑;航向角在控制系统作用下平滑变化至恒定负角,使船舶按照计划航迹航向航行;舵角变化平滑无抖振,最大舵角仅为16°,舵机损耗减少。
4.2 曲线航迹控制仿真
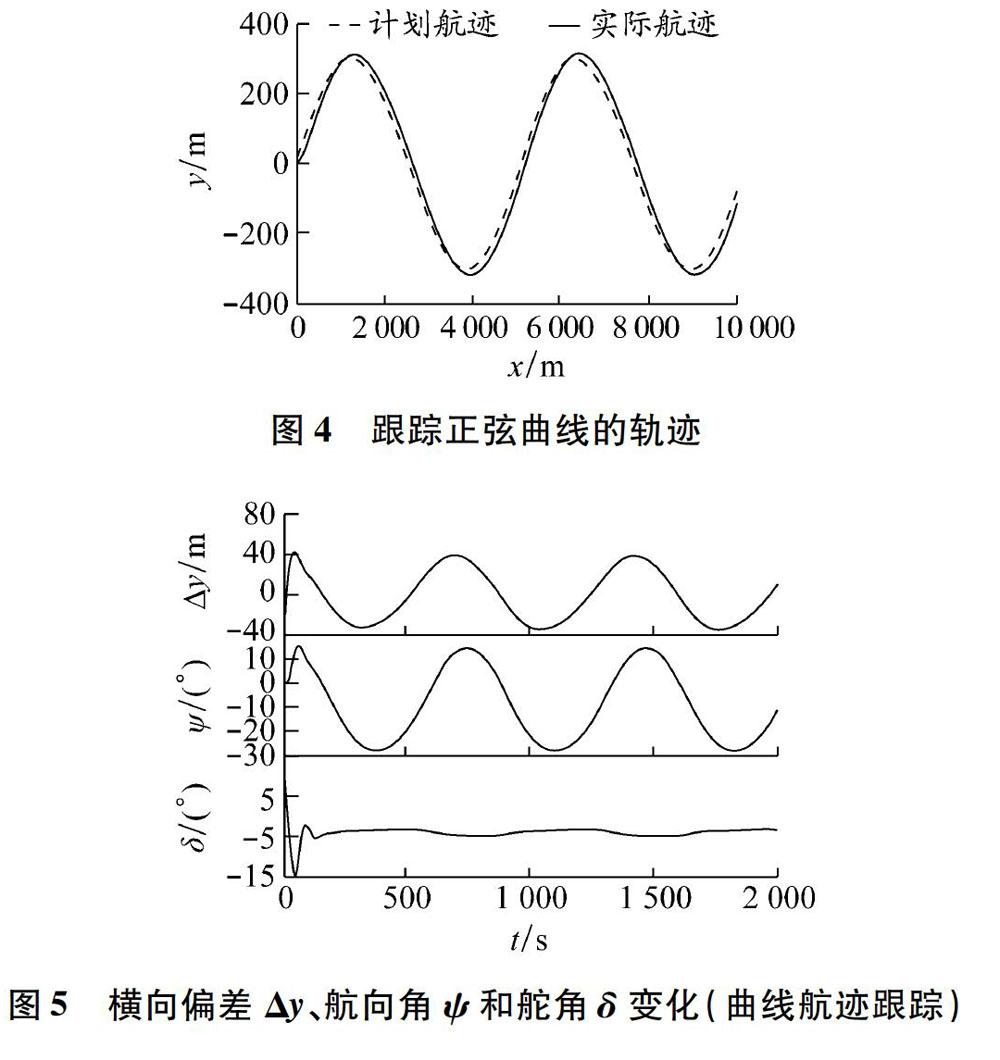
设船舶初始位置为空间坐标系的原点,航向角为0°,跟踪轨迹为yd=300sin(0.000 4πx),即幅值为300 m的正弦曲线,每前进5 000 m完成一个周期。仿真结果见图4和5。
由仿真结果可知:船舶在200 s时跟踪上计划航迹曲线,跟踪速度快、精度高且超調量小;稳定后横向位置偏差在-33 m至37 m之间,呈正弦周期性变化;最大舵角仅为15°,变化平滑,舵机磨损减少;航向角变化平滑且幅值小。
5 结 论
针对常规非线性自抗扰控制(NLADRC)技术在船舶航迹控制中存在的参数整定难、抗干扰能力差的问题,利用径向基函数(RBF)神经网络优化船舶航迹NLADRC系统。利用RBF神经网络收敛速度快、最佳逼近的特性对控制系统参数进行整定,提升了控制系统的控制效果,实现了船舶在有干扰下的直线和曲线航迹跟踪。仿真结果表明,控制系统跟踪速度快且精度高,对外界干扰具有较强的鲁棒性。本文设计的控制系统结构简单,参数整定不复杂,控制效果好,易于工程实现。
参考文献:
[1]卜仁祥. 欠驱动水面船舶非线性反馈控制研究[D]. 大连: 大连海事大学, 2008.
[2]韩京清. 自抗扰控制技术[J]. 前沿科学, 2007(1): 24-31.
[3]GAO Zhiqiang. Engineering cybernetics: 60 years in the making[J]. Control Theory and Technology, 2014, 12(2): 97-109. DOI: 10.1007/s11768-014-0031-3.
[4]GAO Zhiqiang. Active disturbance rejection control: from an enduring idea to an emerging technology[C]//Proceedings of the 10th International Workshop on Robot Motion and Control. IEEE, 2015: 269-282.
[5]RUAN Jiuhong, LI Zuowei, ZHOU Fengyu, et al. ADRC based ship tracking controller design and simulations[C]//Technical Committee on Control Theory, Chinese Association of Automation. The 32nd Chinese Control Conference. IEEE, 2008: 1763-1768.
[6]牛建军, 吴伟, 陈国定. 基于神经网络自整定PID控制策略及其仿真[J]. 系统仿真学报, 2005, 17(6): 1425-1427. DOI: 10.16182/j.cnki.joss.2005.06.039.
[7]LI Zeyu, HU Jiangqiang, HUO Xingxing. PID control based on RBF neural network for ship steering[C]//Technical Committee on Control Theory, Chinese Association of Automation. The 32nd Chinese Control Conference. IEEE, 2013: 1549-1554.
[8]LI Ronghui, LI Tieshan, BU Renxiang. Disturbance decoupling control based trajectory tracking for underactuated ships[C]//Technical Committee on Control Theory, Chinese Association of Automation. The 32nd Chinese Control Conference. IEEE, 2013: 8108-8113.
[9]孟浩, 孙立凯, 刘志林. 船舶航迹控制及航段跟踪策略的研究[C]//中国自动化学会控制理论专业委员会.第37届中国控制会议论文集(B). 武汉: 中国自动化学会控制理论专业委员会, 2018: 1625-1630.
[10]姜涛. 基于RBF神经网络的船舶航向自抗扰控制[D]. 大连: 大连海事大学, 2016.
[11]刘振业. 全垫升气垫船安全航行自抗扰控制策略研究[D]. 哈尔滨: 哈尔滨工程大学, 2013.
[12]ZHANG Qiang, ZHANG Xianku, IM N K. Ship nonlinear-feedback course keeping algorithm based on MMG model driven by bipolar sigmoid function for berthing[J]. International Journal of Naval Architecture and Ocean Engineering, 2017, 9(5): 525-536. DOI: 10.1016/j.ijnaoe.2017.01.004.1.
[13]罗伟林. 基于支持向量机方法的船舶操纵运动建模研究[D]. 上海: 上海交通大学, 2009.
[14]李荣辉, 李铁山, 卜仁祥. 欠驱动水面船舶航迹跟踪自抗扰控制[J]. 大连海事大学学报, 2013, 39(2): 5-8.
[15]GAO Zhiqiang. Scaling and bandwidth-parameterization based controller tuning[C]//American Automatic Control Council. Proceedings of the 2003 American Control Conference. IEEE, 2003: 4989-4996.
[16]尹建川. 径向基函数神经网络及其在船舶运动控制中的应用研究[D]. 大連: 大连海事大学, 2007.
[17]郭跃东, 宋旭东. 梯度下降法的分析和改进[J]. 科技展望, 2016, 26(15): 115-117.
(编辑 赵勉)
