离岸集装箱码头新装卸工艺模式下陆域集疏运堆场堆存空间分配
2020-04-28杨晓斌余思勤沈一帆
杨晓斌 余思勤 沈一帆


摘要:离岸集装箱码头因其岛屿面积限制,难以通过扩建码头内部堆场增加吞吐能力。为解决这个问题,提出一种离岸集装箱码头新装卸工艺模式。新装卸工艺模式是通过在离岸集装箱码头附近的陆域地带建设陆域集疏运堆场,与离岸集装箱码头进行协同装卸作业的模式。陆域集疏运堆场堆存空间分配的目标是满足离岸集装箱码头装卸作业预翻倒要求;单批次输送集装箱的量受到陆岛运输最大通行能力限制。根据上述目标与特点,构建新装卸工艺模式下陆域集疏运堆场堆存空间分配模型,并设计蒙特卡洛树搜索算法进行求解。通过算例分析验证模型的有效性。结果表明该方法能够满足陆域集疏运堆场堆存空间分配需求并提高离岸集装箱码头的吞吐能力。
关键词: 陆域集疏运堆场; 堆存空间分配; 脉冲式输出; 蒙特卡洛树搜索
Abstract: It is difficult to increase the throughput capacity by expanding the internal yard in an offshore container terminal due to the limitation of island area. A new handling technology mode of offshore container terminals is proposed to solve the problem. The new mode of handling technology is to build a collection and distribution yard near the landside area of an offshore container terminal for collaborative loading and unloading with the offshore container terminal. The storage space allocation target of the landside collection and distribution yard is to meet the requirements of pre-reshuffle demand of the offshore container terminal; the traffic volume of single batch of containers is limited by the maximum capacity of land-island transportation. According to the above objectives and characteristics, the storage space allocation model of the landside collection and distribution yard under the new handling technology mode is constructed, and the Monte Carlo tree search algorithm is designed to solve the model. The effectiveness of the model is verified by numerical experiments. The result shows that the proposed method can meet the demand of storage space allocation of a landside collection and distribution yard and can increase the throughput capacity of an offshore container terminal.
Key words: landside collection and distribution yard; storage space allocation; pulse output; Monte Carlo tree search
0 引 言
離岸集装箱码头虽因其具备良好的水深条件能够停靠超大型集装箱船舶,但由于岛屿面积限制,通常很难通过扩建岛内堆场来进一步提升其吞吐能力。为解决这个问题,提出一种离岸集装箱码头新装卸工艺模式。如图1所示,新装卸工艺模式由离岸集装箱码头、陆岛运输和陆域集疏运堆场三部分组成。在靠近离岸集装箱码头的陆域地带新建集疏运堆场,通过陆岛运输为离岸集装箱码头供给集装箱,与离岸集装箱码头协同作业,以此来增加离岸集装箱码头吞吐能力。
该离岸集装箱码头新装卸工艺模式仍存在若干关键问题亟待解决,包括陆域集疏运堆场堆存空间分配问题、陆岛运输的模式与方法以及离岸集装箱码头内部堆场与陆域集疏运堆场协同作业问题等,其中陆域集疏运堆场堆存空间分配问题是本文研究的内容。
目前,国内外学者针对集装箱码头内部堆场的堆存空间分配问题开展了大量研究。张艳伟等[1]提出了从计划分配到动态分配的三阶段箱位分配法和基于不同优先级的决策模型框架。边展等[2]对堆场作业调度问题进行了数学建模,并将启发式规则嵌入两阶段混合动态规划算法中。王斌[3]利用滚动计划周期的方法解决堆场中进出口箱混堆问题,使用两阶段法使得堆场集装箱得到合理配置,从而提高了集装箱码头堆场的堆存效率。刘婵娟等[4]考虑出口箱进场事件的随机性,将出口箱堆存空间分配问题分为两个阶段进行了研究:在滚动计划的基础上以最小运输距离为目标建立出口箱箱区分配模型;以装船过程中翻箱量最少和箱量平衡为目标建立出口箱具体箱位分配模型。KIM等[5]以场桥移动距离最短和集卡运输距离最短为目标建立了堆存空间分配模型。CHEN等[6]用两阶段法构建堆存空间分配模型,第一阶段对混合整数规划模型进行求解,第二阶段采用混合序列叠加算法求解。LEE等[7]提出预先编制堆场的方法,使其符合出口集装箱堆存顺序。KIM等[8]提出一种符合质量分布到达规律的出口集装箱堆存空间分配问题,使用动态规划模型确定堆存位置。顾天意等[9]以堆存箱区到泊位的整体运输距离最短为目标,综合考虑岸桥和场桥作业效率以及配比程度等因素,提出基于矩阵式遗传算法的堆场堆存空间分配优化模型。周鹏飞等[10]提出以两阶段法求解堆存空间分配问题,并分别以场桥移动距离最短和翻箱量最少为目标函数,利用禁忌搜索算法求解。范灵芳等[11]使用二阶段法和基于混合堆放的启发式算法进行堆位分配求解。KANG等[12]运用模拟退火算法和仿真技术研究了箱重分布确定条件下的出口箱堆存空间分配问题。
新装卸工艺模式下陆域集疏运堆场与码头内部堆场的堆存空间分配问题存在许多异同点,本文深入分析离岸集装箱码头陆域集疏运堆场堆存空间分配问题,并针对其作业目标、堆存质量要求、输出特性和资源限制等提出一种陆域集疏运堆场堆存空间分配模型,并设计蒙特卡洛树搜索算法进行求解。
1 陆域集疏运堆场基本问题分析
1.1 作业流程与作业目标
如图2所示为新装卸工艺模式下陆域集疏运堆场作业基本流程:(1)外集卡抵达陆域集疏运堆场进行集港作业;(2)陆域集疏运堆场为进场集装箱安排堆存位置;(3)离岸集装箱码头完成配载计划制订;(4)离岸集装箱码头根据配载计划编制预翻倒计划并发送给陆域集疏运堆场;(5)陆域集疏运堆场按预翻倒计划中的时间和顺序安排二次集港,为离岸集装箱码头分批次输送集装箱;(6)集装箱通过陆岛运输抵达离岸集装箱码头,在码头内部堆场按预翻倒计划进行堆存。
新装卸工艺模式虽然多了二次集港环节,但是可以充分利用二次集港完成预翻倒,以最理想的堆存位置在离岸集装箱码头内部堆场进行堆存,从而节约码头内部堆存空间,提高装船作业效率。
由上述分析可知,该陆域集疏运堆场作业目标与码头内部堆场有所不同。码头内部堆场作业目标是能够更好地满足装船作业需求,陆域集疏运堆场作业目标是在陆岛运输通行能力约束下更好地满足离岸集装箱码头内部堆场预翻倒堆存需求。
1.2 作业特点
(1)离散式输入和脉冲式输出。离岸集装箱码头内部堆场的输入集装箱来自内陆经济腹地,到港箱量及到港时间具有离散不确定性,而输出集装箱直接面向装船。陆域集疏运堆场的输入与码头内部堆场类似,具有离散不确定性,但输出是面向离岸集装箱码头的内部堆场,离岸集装箱码头为提高装船效率会通过制订预翻倒计划要求后方堆场在指定时间内按一定顺序大批量为码头输送集装箱。因此,陆域集疏运堆场的输出具有脉冲性。堆场也需要在堆存空间安排上作出一定调整以应对输出脉冲性。
(2)轻压重堆存要求。离岸集装箱码头内部堆场需要尽量以重压轻的方式堆存集装箱,从而在装船作业时最小化翻箱量,满足船舶适航性要求。陆域集疏运堆场需要尽量以轻压重的方式堆存集装箱,这样才能在为离岸集装箱码头供箱时最小化翻箱量,并满足码头堆场重压轻的堆存要求。
(3)陆岛运输通行能力约束。陆岛运输无论采用水路运输还是大桥运输,通行能力都会在一定程度上限制后方堆场对离岸集装箱码头的供箱能力。
2 陆域集疏运堆场堆存空间分配模型
2.1 符号定义
i表示任意进港集装箱(以下简称进港箱),i∈I;j表示任意在场集装箱(以下简称在场箱),j∈J;k表示堆场中目标进港箱相对于在场箱的堆放方式,1表示上侧堆放,2表示左侧堆放,3表示右侧堆放;b表示任意箱区贝位,b∈B;q表示任意箱区,q∈Q;mi表示进港箱i的质量;mj表示在场箱j的质量;Si表示进港箱i的尺寸;Sb表示贝位b能存放集装箱的尺寸;hj表示在场箱j所在的层高;h表示箱区允许堆放的最大层高;Mk表示在堆放方式k下两个集装箱的吨差限制;Dbb′表示贝位b与b′之间的距离;U表示码头需求脉冲峰值,箱/h;A表示场地设备作业能力,箱/h;E表示过陆岛运输大桥任意断面每小时最大车辆通行数。
0-1变量如下:Biq表示箱区q是否包含进港箱i的同航次集装箱,包含为1,否则为0;Sij表示进港箱i与在场箱j的尺寸是否相同,相同為1,否则为0;Wij表示进港箱i与在场箱j的重量级是否相同,相同为1,否则为0;Vij表示进港箱i与在场箱j的船名和航次是否相同,相同为1,否则为0;Hij表示进港箱i与在场箱j的箱高是否相同,相同为1,否则为0;Gij表示进港箱i与在场箱j的卸货港是否相同,相同为1,否则为0;Ojk表示进港箱以方式k堆放在在场箱j的对应位置是否可用,可用为1,否则为0;Cjq表示在场箱j是否在箱区q,在为1,否则为0;Zj表示在场箱j所在箱区是否有装卸作业,有为1,否则为0;Lj表示在场箱j所在箱区是否有龙门吊,没有为1,否则为0;Lb表示贝位b所在箱区是否有龙门吊,没有为1,否则为0;Zb表示贝位b所在箱区是否有装卸作业,有为1,否则为0;Kib表示进港箱i与贝位b上已有集装箱的航次是否匹配,匹配为1,否则为0;Jib表示进港箱i与贝位b上已有集装箱的卸货港是否匹配,匹配为1,否则为0;Nb表示贝位b是否是空贝位,空为1,否则为0;Pb表示贝位b是否被锁定,未被锁定为1,否则为0;Rjb表示在场箱j是否属于贝位b,属于为1,否则为0;Rbq表示贝位b是否属于箱区q,属于为1,否则为0。
决策变量如下:Xijk表示进港箱i以方式k堆放至在场箱j对应位置;Xib表示进港箱i是否堆放至贝位b,Xib=kj(XijkRjb);Xiq表示进港箱i是否堆放至箱区q,Xiq=b(XibRbq)。
2.2 模型构建
2.2.1 目标函数
式(1)表示最大化堆场发箱能力与脉冲峰值的匹配度:发箱能力不能太低,否则无法满足离岸集装箱码头要箱需求;发箱能力也不能过高,否则容易造成资源抢占,影响其他船舶发箱。式(2)表示最大化“轻压重”吨差的倒数之和。堆场内任意两个上下相邻集装箱,“轻压重”吨差越小越优。式(3)表示最大化场地机械设备利用率。式(4)表示最大化贝内同属性箱相关度。集装箱箱高、卸货港、所属船舶均相同时相关度最大。式(5)表示最大化贝间同属性箱相关度,相关度随两个贝位之间距离的增加而减小,能使堆场在进行集装箱堆存空间分配决策时,满足箱位集中且分布均衡的条件。
2.2.2 约束条件
式(6)表示任意进港箱只能堆放在一个场地位置;式(7)表示任意两个上下相邻集装箱吨差必须小于最大吨差限制;式(8)表示所分配的场地位置不能被占用;式(9)表示所分配的场地位置不能违反层高限制;式(10)表示所分配的场地位置不能违反箱尺寸限制;式(11)表示任意进港箱只能被分配至一个箱区贝位;式(12)表示所分配箱区贝位必须是空的且不能被封锁;式(13)表示所分配的箱区贝位不能违反箱尺寸限制;式(14)为陆岛运输大桥最大通行能力约束(由于一辆集卡可以装一个40英尺(1英尺≈0.304 8 m)箱或者2个20英尺箱,所以箱、车比例按1.5折算)。
3 陆域集疏运堆场堆存空间分配算法
3.1 蒙特卡洛树搜索算法概述
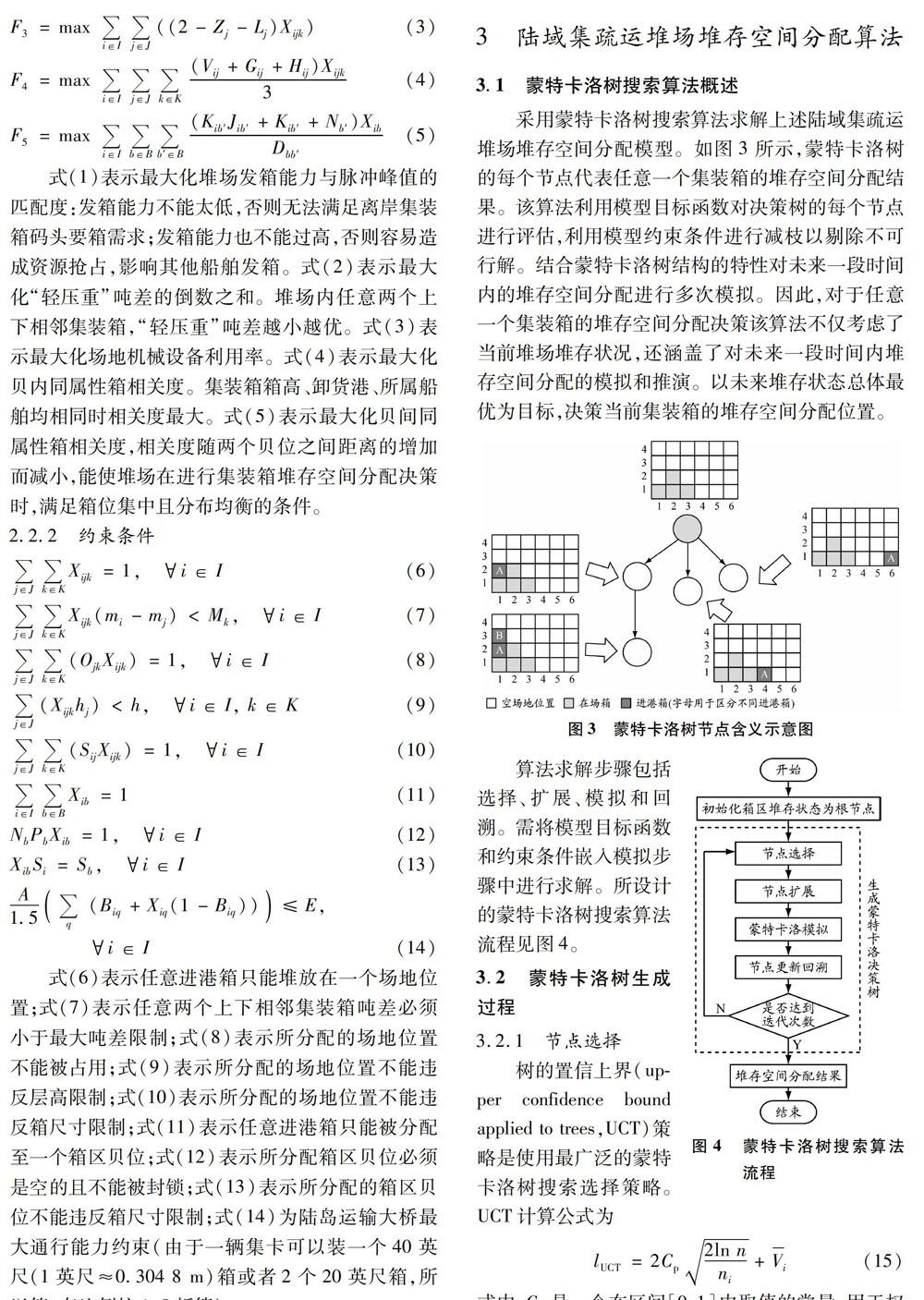
采用蒙特卡洛树搜索算法求解上述陆域集疏运堆场堆存空间分配模型。如图3所示,蒙特卡洛树的每个节点代表任意一个集装箱的堆存空间分配结果。该算法利用模型目标函数对决策树的每个节点进行评估,利用模型约束条件进行减枝以剔除不可行解。结合蒙特卡洛树结构的特性对未来一段时间内的堆存空间分配进行多次模拟。因此,对于任意一个集装箱的堆存空间分配决策该算法不仅考虑了当前堆场堆存状况,还涵盖了对未来一段时间内堆存空间分配的模拟和推演。以未来堆存状态总体最优为目标,决策当前集装箱的堆存空间分配位置。
算法求解步骤包括选择、扩展、模拟和回溯。需将模型目标函数和约束条件嵌入模拟步骤中进行求解。所设计的蒙特卡洛树搜索算法流程见图4。
3.2 蒙特卡洛树生成过程
3.2.1 节点选择
树的置信上界(upper confidence bound applied to trees,UCT)策略是使用最广泛的蒙特卡洛树搜索选择策略。UCT计算公式为
式中:Cp是一个在区间[0,1]内取值的常量,用于权衡蒙特卡洛树搜索的广度与深度优先级;n是当前父节点被访问的次数;ni是当前父节点的子节点i被访问的次数;Vi是子节点i的评估均值。
由式(15)可知:蒙特卡洛树搜索的选择策略在迭代初期更倾向于选择被访问次数少的节点,从而提高搜索广度;随着迭代次数的增加,选择策略会倾向于选择评估均值高的节点。
3.2.2 节点扩展
当选择到叶子节点时,需对被选择的叶子节点进行扩展。如图5所示,随机选择一个可能的堆存空间分配结果作为其子节点进行扩展,并初始化该节点的累计评估值Vt和被访问次数n。
3.2.3 蒙特卡洛模拟
蒙特卡洛模拟即对未来堆存空间分配进行模拟推演。若在模拟过程中发现模型约束条件被违反,即无可行解或完成了所有集装箱堆存空间的分配,则结束模拟过程并计算本次模拟得到的评估值V。模拟过程如图6所示,具体模拟步骤如下:
步骤1 将扩展节点所代表的堆存状态作为初始状态开始模拟。
步驟2 在满足模型约束条件的情况下计算后续所有可行堆存空间分配结果作为模拟节点,并根据模型计算各模拟节点的目标函数值,再根据式(16)进行归一化处理,其中Fαβγ表示模拟过程第β层第γ个节点的第α个目标函数值,F^αβγ为归一化后的目标函数值,Γ为节点集合。
步骤3 随机选择一个节点作为后继节点,并将该节点及其归一化后的目标函数值记录至集合K中。
步骤4 从被选择的后继节点开始重复步骤2和3进行模拟。
步骤5 达到模拟迭代次数后根据式(17)计算本次模拟的评估值V。
3.2.4 节点回溯更新
沿着被选择节点回溯模拟评估值V,并根据式18)更新沿途各节点的累计评估值Vt、被访问次数n和节点评估均值V。V用于下一轮节点选择计算。节点回溯更新示意图见图7。
3.3 算 例
3.3.1 算例说明
为50个集装箱(见表1)分配堆存位置。
设定算法最大迭代次数为10 000,蒙特卡洛树搜索的广度与深度优先级权衡参数Cp取1/2。假设集装箱以随机顺序到达陆域集疏运堆场,堆场内随机安排场地设备配合作业。
3.3.2 算例结果及分析
利用蒙特卡洛树搜索算法得到的堆存空间分配结果见图8。由图8可知:堆存空间分配结果满足模型约束条件;同属性箱堆存相对集中,未发生同贝位上不同卸货港箱混堆现象。将该分配结果与同算例下码头操作系统(terminal operation system,TOS)分配结果进行对比,结果见表2。由表2可知,本文算法分配结果总体表现较好,各目标函数均得到较优值。在场地设备利用率上,本文算法分配结果与TOS分配结果基本持平。“重压轻”吨差略差于TOS分配结果的吨差,但仍在合理范围内。在堆场发箱能力与脉冲峰值匹配度这一目标上,本文算法分配结果相比TOS分配结果提升较为明显,提升率约达30.4%。
3.3.3 收敛性分析和参数影响分析
图9为对该算例的算法收敛曲线。由图9可知:算法迭代至8 000次左右时,根节点的评估均值V趋近收敛;迭代结束后,评估均值V最终收敛于4.290。
为分析参数Cp对算法的影响,设计多组实验分析Cp的变化对算法整体性能和结果的影响。实验结果见图10。
由图10可知:当Cp取值过小时,搜索遍历广度不足,致使算法容易快速陷入局部最优解;当Cp取值过大时,算法收敛较慢;当Cp取0.6 时,算法收敛速度与目标值达到平衡,迭代约7 500次,评估均值收敛至4.572。
4 结 论
本文对离岸集装箱码头新装卸工艺模式下陆域集疏运堆场的堆存空间分配问题进行了研究。根据其作业目标和特点构建堆存空间分配模型,并设计蒙特卡洛树搜索算法进行求解,主要研究成果及创新点包括:
(1)对离岸集装箱码头新装卸工艺模式下陆域集疏运堆场堆存空间分配的目标和特点进行分析,对比陆域集疏运堆场与离岸集装箱码头内部堆场作业目标,指出陆域集疏运堆场以满足离岸集装箱码头预翻倒要求为主要目标进行堆存空间分配,以协同离岸集装箱码头进行装卸作业,有效提高码头吞吐能力。
(2)根据陆域集疏运堆场作业特点,结合集装箱堆场堆存空间分配的基本目标和约束,构建混合整数规划模型,设计蒙特卡洛树搜索算法进行求解。
(3)通过算例证明了模型的有效性,并通过算法性能分析验证了所设计蒙特卡洛树搜索算法具备较好的收敛能力,可有效决策陆域集疏运堆场堆存空间分配问题,具有较强的实际应用价值。
参考文献:
[1]张艳伟, 石来德, 宓为建, 等. 集装箱码头出口箱集港堆存模型研究[J]. 中国工程机械学报, 2007, 5(1): 36-42. DOI: 10.15999/j.cnki.311926.2007.01.008.
[2]边展, 徐奇, 靳志宏, 等. 考虑翻箱作业时出口箱堆场作业调度优化[J]. 上海交通大学学报, 2014, 48(1): 146-153. DOI: 10.16183/j.cnki.jsjtu.2014.01.025.
[3]王斌. 集装箱码头堆场的一种动态随机堆存方法[J]. 系统工程理论与实践, 2007(4): 147-153, 170.
[4]刘婵娟, 胡志华. 基于滚动计划的堆场出口箱存储位置分配两阶段模型[J]. 上海大学学报(自然科学版), 2017, 23(5): 789-800. DOI: 10.12066/j.issn.1007-2861.1741.
[5]KIM K H, PARK K T. A note on a dynamic space-allocation method for outbound containers[J]. European Journal of Operational Research, 2003, 148: 92-101. DOI: 10.1016/S0377-2217(02)00333-8.
[6]CHEN Lu, LU Zhiqiang. The storage location assignment problem for outbound containers in a maritime terminal[J]. International Journal of Production Economics, 2012, 135(1): 73-80. DOI: 10.1016/j.ijpe.2010.09.019.
[7]LEE Y, HSU N-Y. An optimization model for the container pre-marshalling problem[J]. Computers & Operations Research, 2007, 34: 3295-3313. DOI: 10.1016/j.cor.2005.12.006.
[8]KIM K H, PARK Y M, RYU K-R. Deriving decision rules to locate export containers in container yards[J]. European Journal of Operational Research, 2000, 124: 89-101.
[9]顧天意, 梁承姬. 基于矩阵式遗传算法的集装箱码头堆场空间资源分配优化策略[J]. 上海海事大学学报, 2012, 33(2): 40-46.
[10]周鹏飞, 方波. 动态环境下集装箱码头堆场出口箱箱位分配建模与算法研究[J]. 控制与决策, 2011, 26(10): 1571-1576.
[11]范灵芳, 陈璐. 集装箱码头出口箱堆位分配算法[J]. 系统工程, 2011, 29(10): 84-89.
[12]KANG J, RYU K R, KIM K H. Deriving stacking strategies for export containers with uncertain weight information[J]. Journal of Intelligent Manufacturing, 2006, 17(4): 399-410. DOI: 10.1007/s10845-005-0013-x.
(编辑 赵勉)
