应用于核能衰变微推进控制的驱动设计
2020-04-28何世熠肖文磊刘国青
徐 飞 夏 彦 何世熠 肖文磊 刘国青
1.北京卫星环境工程研究所,北京 100094 2.北京卫星环境工程研究所 可靠性与环境工程技术重点实验室,北京 100094 3.西北核技术研究所,西安 710024 4.北京航空航天大学,北京 100083
核能衰变微推进的原理是利用重核α衰变时向空间方向射出的高速粒子形成反推力。基于该原理的空间推进技术具有高比冲、无需推进剂及结构简单的特点,具有特殊的应用价值。同样是无需推进剂的微推进技术,目前最主要的研究就是太阳帆技术,国内北理工、清华和中科院等单位对此作了很多研究[1-3],但是对于α衰变推进的研究不多[4]。
利用α粒子微推进原理研制的微推进器,可安装在航天器上作为无拖曳飞行的推力器[5],无拖曳飞行技术是对航天器的推力精度要求最高的,其广泛用于深空探索[6]、重力场测量[7]等领域,国内哈工大等航天单位也对无拖曳技术有着深入研究[8],通过微推力器的推力抵消航天器在空间环境受到的各种干扰力,包括残余大气阻力、磁场以及太阳光压等[9]。α粒子微推进的概念早在上世纪就有意大利学者研究过[10],国内的学者近年来也有类似的研究,但主要的空间核能应用还是围绕核反应堆提供能量[11-12],而本文只利用核素的α衰变发射的高速粒子产生推力,这与前者的核能原理有本质的不同。本文的推进控制驱动设计就是要将α衰变原理发展成可操作的微推进器技术。
鉴于α衰变的自身特性,针对无拖曳飞行技术对于微推进器的需求,本文研究了α粒子推进控制的驱动结构,并进行了初步的性能分析。
1 α衰变推力薄膜
α粒子穿透性很弱,210Po衰变的α粒子在穿透自身Po金属的射程仅为23.4μm。因此只能采用薄膜结构才能做到推力的产生。薄膜里超过射程深度处产生的α粒子几乎不可能射出薄膜,也就没有推力,推力薄膜的厚度只能小于射程,并采用银基底阻挡α粒子向另一半空间发射,结构如图1所示。作者课题组经过理论计算认为,构成α粒子微推进器的薄膜理论推力可达到0.03μN/cm2,具体的理论推导过程可参阅本研究组的相关论文,在此不再叙述。
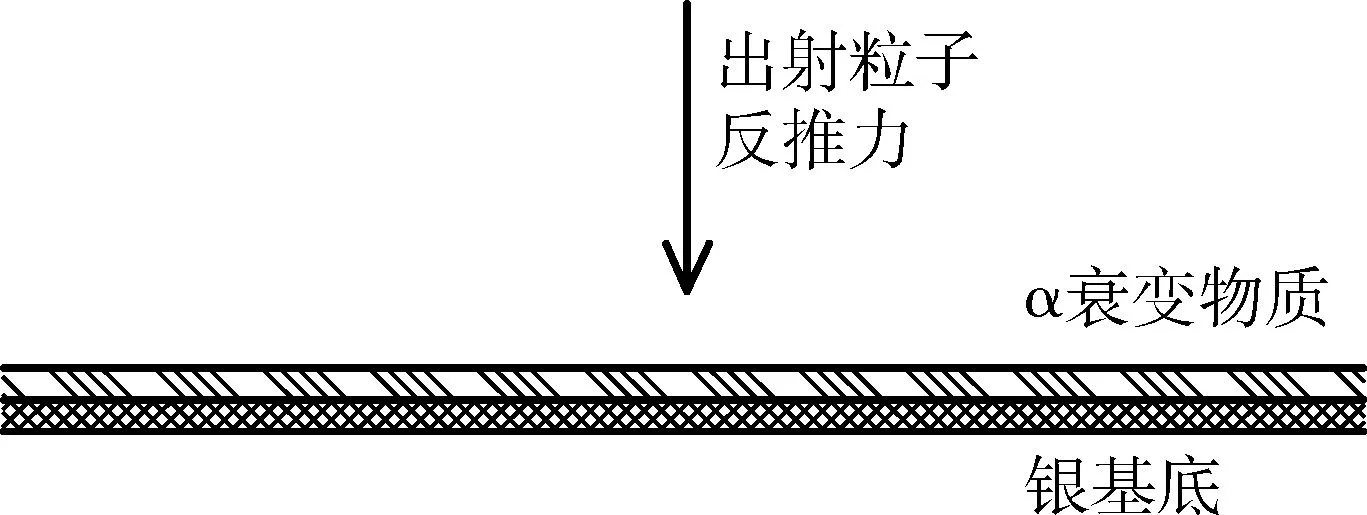
图1 α粒子推力薄膜结构示意图
2 超声电机驱动设计
超声电机(ultrasonic motor, USM)是20世纪80年代开始逐渐发展起来的一种新型的微特电机,其主要工作原理是利用压电材料的逆压电效应,在超声频段内激发弹性体(压电定子)的微幅高频共振(共振频率一般为20~100kHz),并且通过定子和转子(动子)之间的摩擦作用将振动转换成转子(动子)的旋转(直线)运动,由此实现功率输出而驱动负载。相比传统的电磁电机而言,超声电机具有低速大推力、精度高、便于小型化、响应速度快、断电自锁、不需要传动减速装置、勿需润滑、电磁兼容性与低温真空环境的适应性强及噪声低等优点,因此在航空航天领域得到了广泛的应用。以上特点决定了其应用于α粒子推进控制是个极佳的选择。
2.1 环形超声电机驱动光阑
超声光阑方案主要采用了超声电机驱动的光阑结构完成通光(辐射)孔的开度控制功能,其基本工作原理与佳能的EF镜头类似,如图2所示。
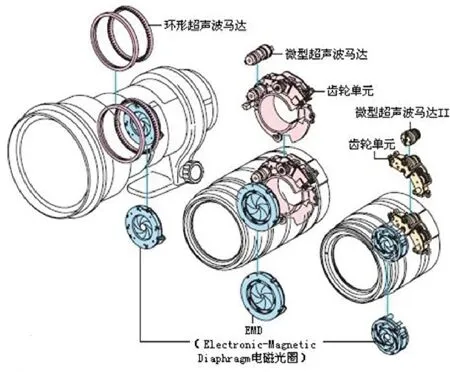
图2 在佳能相机的EF镜头中使用的超声电机与光阑
2.1.1 光阑工作原理
在光学成像系统中,光阑被定义为一个中心与光轴重合且垂直光轴放置的通光孔屏,孔的形状一般为圆形,由作为屏障的金属薄片和作为边缘的金属框来组合实现。如果通光孔的大小可以调节,这样的光阑称为可变光阑。在光学器件中有多种可实现可变光阑的结构设计,其中最常见的一种是彩虹光阑(如图3)。其基本结构主要由活动环、固定环和光阑叶片(多片)构成,由于叶片的一端通过固定销钉与固定环固结,另一端通过活动销钉与活动环联动,所以活动环的转动可以带动其上的叶片旋动,而不同的转动方向则分别对应通光圆孔的张开或闭合。
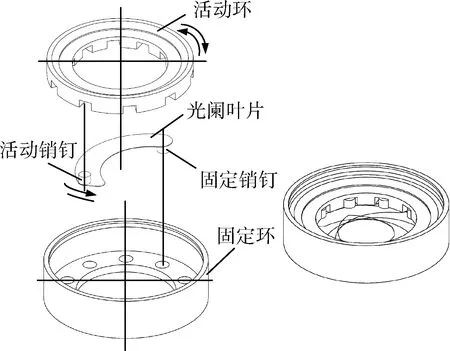
图3 彩虹光阑的基本结构及其装配示意图
依照《光学仪器设计手册》,我们可以根据最大/最小通光孔直径以及限制机构外形尺寸的有关结构参数,来设计光阑叶片的形廓参数,包括内/外曲率半径、销钉孔所在圆周半径、两销钉孔对中心张角、光阑叶片的数目和光阑片厚度等。
2.1.2 环形超声电机的工作原理
行波型旋转超声电机(TRUM)是一类比较有代表性和目前获得较多应用的超声电机,主要包含2大构件,即如图4所示的定子(基体)和转子,通过一定的预压力将转子紧压在定子上,为它们之间的摩擦传动提供必要的正压力。工作时在压电陶瓷上施加在超声频段内的两相(A相和B相)具有一定相位差的同额、等幅的正弦交流电压,在定子中激发出行波,从而将电能转换为定子的超声振动,再利用接触摩擦机理将定子的高频微幅振动规整成为转子的旋转运动并带动负载,整个过程实现了从电能输入到机械能输出的能量转换。
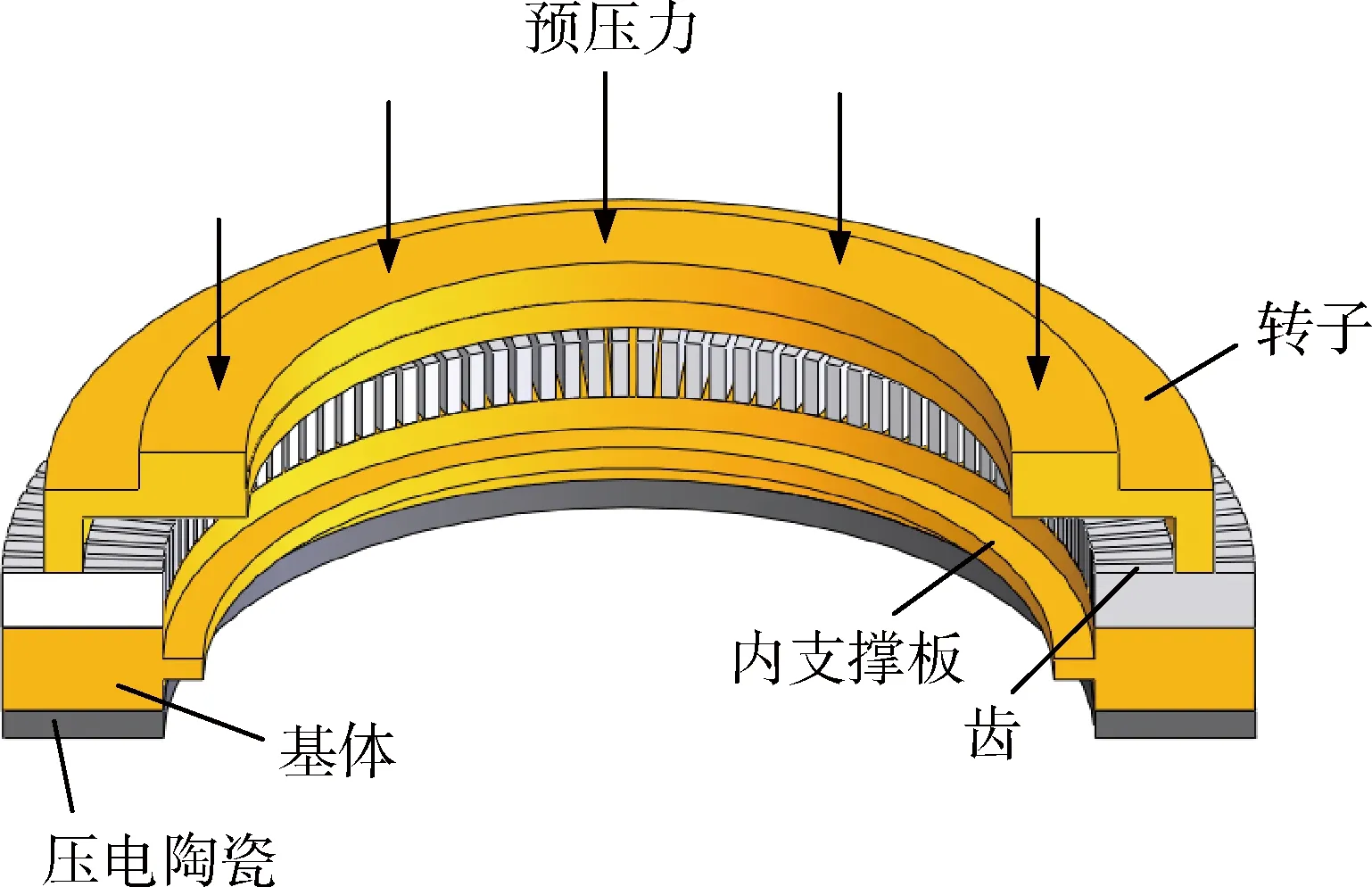
图4 行波型旋转超声电机结构简图
2.1.3 环形超声电机驱动光阑设计
基于超声电机的优点,本研究采用行波型旋转超声电机驱动可变光阑活动环的方案来实现对光阑通孔开闭的高效控制。由于旋转电机本身与环形负载之间的相互配合性使得整体结构简单、紧凑。可变光阑与旋转超声电机的装配一体图如图5所示,整体系统的装配结构剖面示意简图如图6所示。
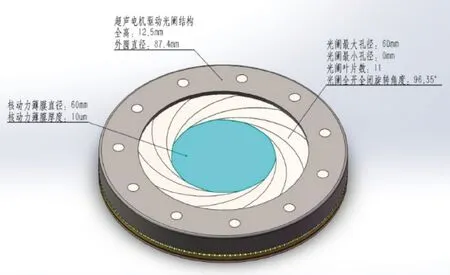
图5 超声电机驱动光阑工作模块
如图5所示,光阑与超声电机均为圆环形叠层结构,二者一起位于核能推力薄膜的正上方,光阑在上,超声电机在下。光阑及光阑叶片能够实现中间圆孔的打开与关闭,由行波型旋转电机驱动。在本研究算例中,驱动装置全高12.5mm,外圆直径87.4mm;核动力薄膜直径60mm,厚度10μm;光阑最大孔径60mm,最小孔径0mm,叶片数11片,全开全闭所需旋转角度为96.35°。
因此参照上文推力薄膜0.03μN/cm2的标准,最大推力可达到0.85μN,最小推力为0。超声电机驱动光阑可精确停止定位,理论上可实现光阑的孔径大小连续可调,相应的动力大小可在0~0.85μN之间任意调整。本系统光阑叶片材质选取304不锈钢,电机材料为PZT锆钛酸铅。
光阑开关采用对旋方式工作,电机动子正转,光阑反转打开,通道扩大,推力薄膜提供的推力变大;电机动子反转,光阑正转关闭,通道缩小,推力薄膜提供的推力变小。光阑一是为推力薄膜提供裸露面积,二是在旋转过程中保持推力器角动量守恒,在航天器上不会引起星本体角动量变化,从而避免了航天器做额外的消旋与消振,相较传统航天器推力控制方式具有独特优势。
2.2 直线型超声电机驱动对开式开关
直线型超声电机作为超声电机的一个分类,也是利用压电元件的逆压电效应和弹性体的超声振动,通过定子和动子之间的摩擦作用,把弹性体的微幅振动转换成动子宏观的直线运动,直接推动负载[13-16]。它除了具有旋转超声电机的一般特点外,还具有以下特点[17]:
1)直接产生直线运动和牵引力;
2)由于没有连杆、滚珠丝杠、绳带等辅助机构带来的误差,所以其定位精度和速度控制精度高,可达纳米量级;
3)结构简单,能实现小型化、轻量化。
2.2.1 直线型超声电机原理
直线超声电机基本结构与工作原理见图7,在两组极化方向相反的压电陶瓷元件上分别施加AB两相相位差为π/2的同频率(超声频段内)、等幅交变电压。通过压电陶瓷元件的逆压电效应,可在定子的模态频率上激发出模态响应,一个是一阶纵振位移响应,一个是二阶弯振位移响应,二者在时间上存在π/2的相位差,此外,在二阶弯振的振幅处,二阶弯振位移和一阶纵振位移方向始终相互垂直,即对于二阶弯振波幅处的驱动足上的2个位移响应在空间上亦存在π/2的相位差,所以位于二阶弯振波幅处的驱动足上可形成椭圆运动轨迹。如果此时在转子上施加一定的预压力,通过定、转子之间的摩擦作用,定子表面质点的微幅振动就会转换为转子的旋转运动[10]。
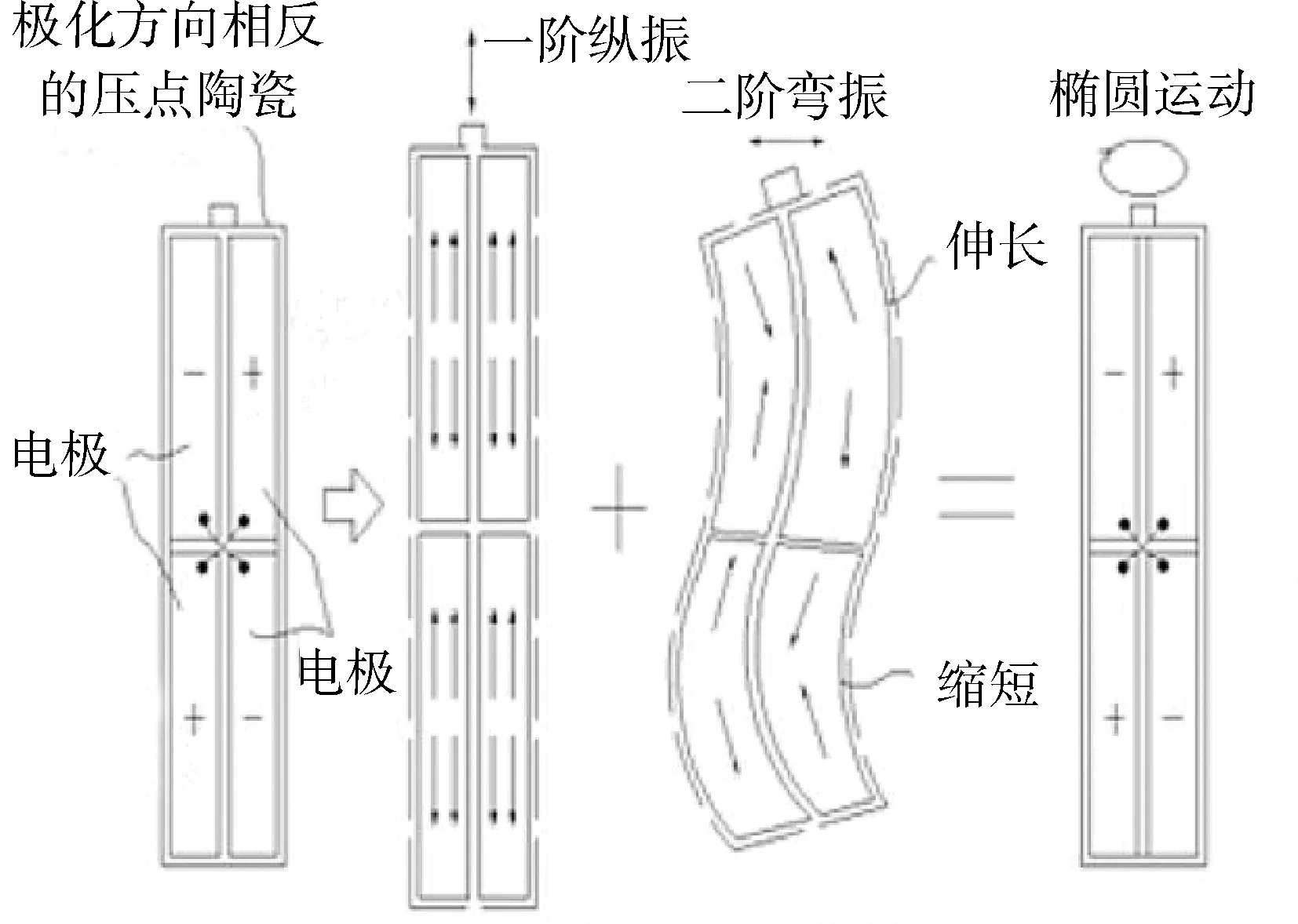
图7 直线型超声电机定子的工作机理
2.2.2 对开式开关设计
本文设计了对开式开关,如图8所示,左右各一个驻波直线型超声电机,分别控制左右两侧挡板的移动,超声电机驱动电源线在推进器背面引出。电机的摩擦片布置在挡板的中间,与电机相接触的一面。挡板在基座内直线滑动,基座上下各有一道凹槽,挡板边缘嵌入其中,用于限位。中央核能推力面元为正方形,四周均设计了1~2cm的高度,用于防止粒子向左右两侧发射逸出。理论上,挡板遮挡的动力薄膜面大小连续可调,相应的动力大小即可任意调整。实际应用中,超声电机的控制精度决定动力大小的控制精度,为了保证推力的中心轴位置不变,采用2组超声电机伺服驱动器实现对两侧挡板移动的高效协同控制,保证两侧挡板同时开闭,同时保证系统的总动量为0。
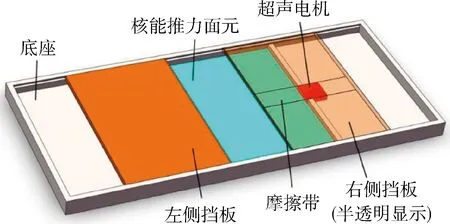
图8 对开式平移开关微推进器
α微推进器全高为3mm,推力薄膜面积规格为30mm×30mm,左右两边配置驻波超声电机,对应的摩擦带长度为15.5mm,左右两侧挡板尺寸为19.25mm×30mm×0.5mm,材料为聚酰亚胺。基座材料为硬铝合金2A12,电机材料为PZT锆钛酸铅。参照上文推力薄膜0.03μN/cm2的标准,该微推进器的推力范围为0~0.27μN。本案例中,当电机对挡板的位移控制精度优于1.1mm时,即可达到0.1μN的推力控制精度。
此微推力器在立方星上做阻力补偿的概念图如图9所示。
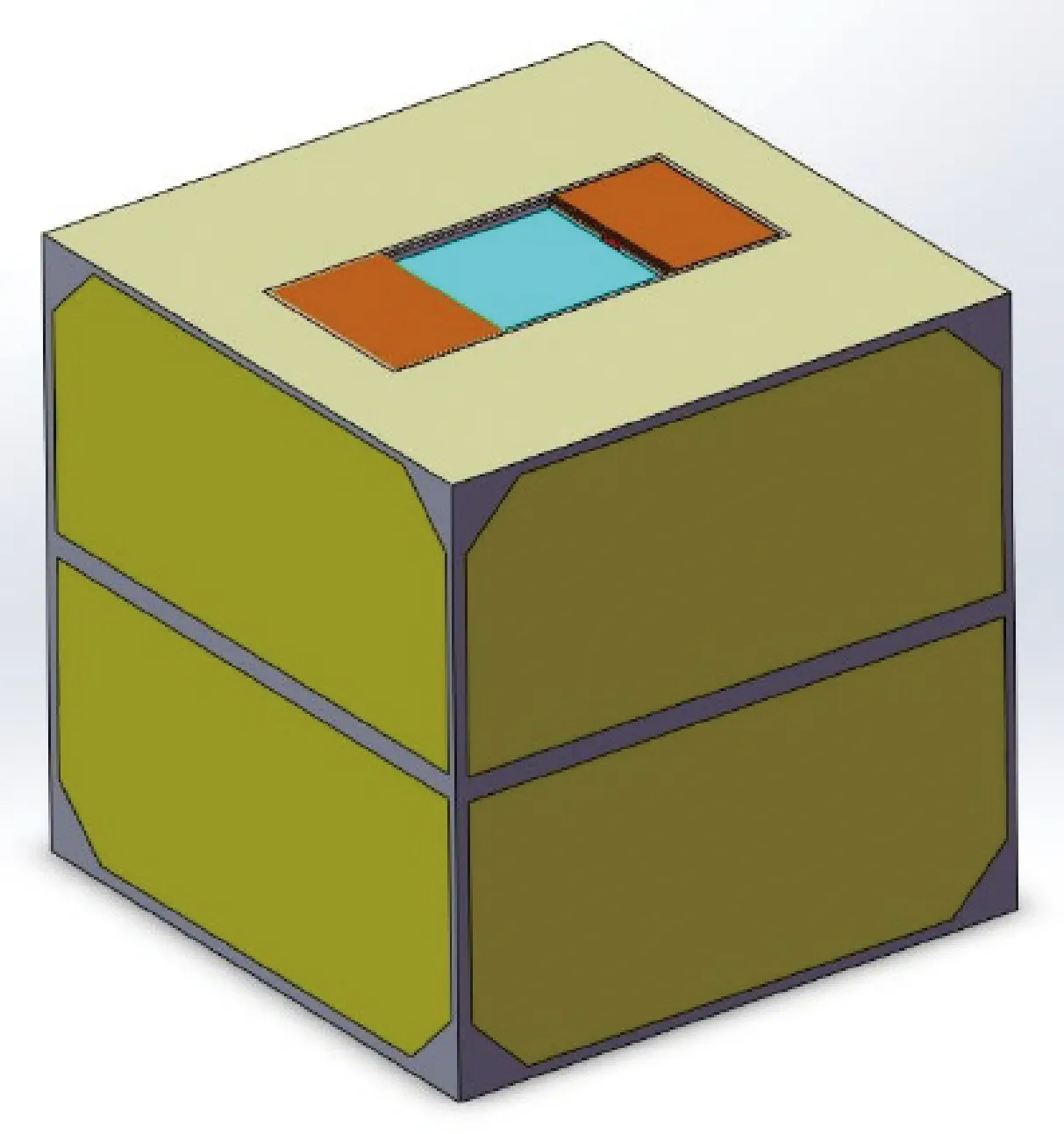
图9 α微推进器在立方星上阻力补偿的概念图
2.3 两种驱动设计的矢量推力分析
环形超声电机驱动结构紧凑,光阑开闭所需空间很小,二者结合即能实现多项密集排布,即可实现多个推力薄膜以不同角度各自独立工作。而对于直线型超声电机驱动对开式开关,则不便于密集排布的布局,可以考虑在航天器的不同位置布置多个推力装置,实现高精度矢量合成控制。
3 结论
设计了α粒子推进器基本控制结构,包括环形和直线型2种。思想是将衰变核素构成的推力薄膜用面积遮挡的方式进行推力控制,超声电机驱动光阑的设计对于α粒子的出射具有自旋稳定,角动量守恒的优势,同时紧凑的结构适用于多推力器矢量集成。而直线型电机直接产生驱动力,其定位和速度控制精度更高,也即具有更高精度的α粒子推力控制。后续将围绕环形超声电机驱动光阑设计矢量推进器,围绕直线型电机定位精度高的特点展开实验验证,实测开关的运动数据,进而得出α粒子推力器的相关参数。