低轨卫星星座精密定轨及运行控制发展综述*
2020-04-28李玖阳王许煜李菲菲徐家辉
李玖阳 胡 敏 王许煜 李菲菲 徐家辉
航天工程大学,北京 101416
随着互联网技术的发展和发射入轨成本的降低,对低轨卫星星座全球覆盖率、通信时延和通信速率的要求越来越高,导致星座构型越来越复杂,卫星数目越来越多。因此,如何对低轨卫星星座构型进行高效且经济的保持控制,已经成为卫星星座领域亟待解决的问题。
近5年,商业航天和微小卫星的发展使发射入轨和全球组网的成本大大降低。SpaceX、波音、OneWeb、三星都相继提出了低轨全球覆盖的互联网星座[1],Iridium的公司也提出了Iridium Next计划,这些星座具有卫星数目较多的特点。例如,SpaceX、OneWeb和波音等公司提出的星座卫星数目从600至4000多颗不等,增加了星座构型复杂度,进而产生了许多问题。例如,在低轨卫星星座卫星数目众多、所受摄动力更加复杂的情况下,如何对其高效的精密定轨,高效、经济地维持星座构型等。同时,将现有的中高轨卫星的星间链路精密定轨,参数偏置构型保持推广到低轨卫星星座还有大量的理论问题需要研究,应用前景广阔。
1 低轨卫星精密定轨
1.1 关键技术
1.1.1 星载全球卫星导航系统GNSS高精度定轨
随着LEO低轨卫星对定轨精度要求的提高,低轨卫星搭载的GNSS接收机也越来越成熟。产生了许多LEO星载GNSS精密定轨方法和定轨实验结果,其中精密定轨方法可分为几何法、动力平滑法、动力法和约化动力法等[2],按实时性划分可分为事后精密定轨和实时精密定轨。
1)事后精密定轨
最早开展星载GNSS定轨的卫星是1982年发射的Landsat-4卫星,搭载了全球定位系统GPS导航模块(GPSPAC),利用GPS定轨。由于当时GPS系统卫星数目较少,建模能力有限,同时单频接收机定轨误差较大,动力平滑法定轨会丢失部分观测信息,这些因素造成定轨精度只有20m[3]。星载GNSS定轨第一次得到厘米级精度是TOPEX/POSEIDON(T/P卫星)[4]。T/P卫星采用新的GPS双频接收机和已建成的GPS系统提高了数据质量,新的JGM-3引力模型和约化动力法也降低了系统误差,这些因素使最终定轨精度达到2.5cm,但该精度的得出也有T/P卫星轨道受大气阻力影响小、对T/P卫星大量建模的原因。而在低于700km轨道高度的卫星上采用相同的方法和配置,定轨精度较低。由欧洲航天局研制的GOCE卫星携带12通道GPS双频接收机,采用等离子体电推进进行无阻力飞行,以抵消大气阻力产生的影响。因此,GOCE在定轨时减少了由于大气阻力摄动带来的定轨误差。Heike等人在此基础上分析GOCE重力场测定的卫星2个月的GPS数据,采用约化动力学和快速几何法使定轨精度分别达到4cm和7cm[5]。上述低轨卫星的定轨方法、定轨精度总结如表1所示。
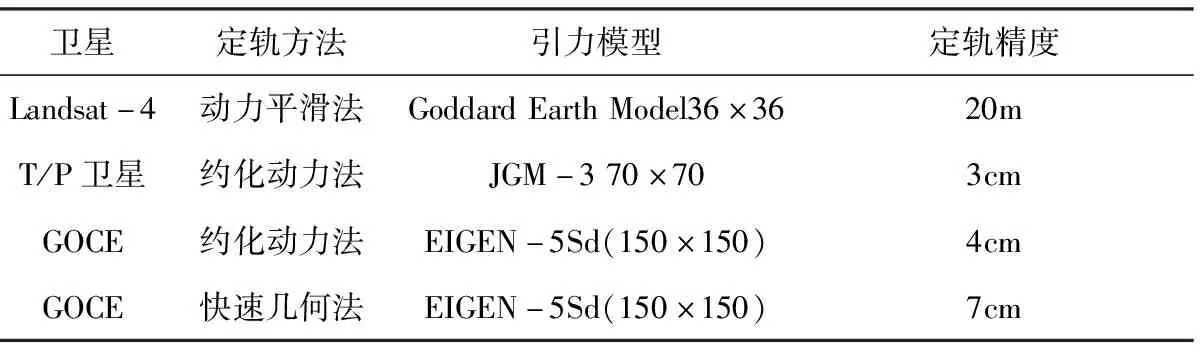
表1 低轨卫星定轨精度和定轨方法
2)实时精密定轨
随着低轨卫星星座中卫星数目的增多,通过地面站事后数据处理进行精密定轨逐渐不能满足要求。而星载GNSS实时定轨能极大地简化地面操作管理的复杂度,同时能为卫星智能化、自主化管控提供良好的基础。
为了提高定轨精度,2000年后实时精密定轨开始采用扩展卡尔曼滤波EKF、考虑卡尔曼滤波CKF等最优估计算法和对广播星历的差分校正。Goddard空间飞行中心(GSFC)对T/P卫星的实测数据进行处理,滤波收敛后位置和速度精度为7.8m和5.9mm/s[6]。Yang等基于考虑卡尔曼滤波CKF的约化动力法CKF-RDOD,在仅使用5(5阶EGM重力场模型的情况下,利用GRACE B卫星的实测数据进行定轨,使实时定轨精度达到了1.5m[7]。该方法使用了阶数较低的重力场模型,达到了较好的定轨精度,有利于提高星上实时精密定轨的计算速度,节约计算资源。美国喷气推进实验室JPL采用 RTG实时精密定轨软件和CHAMP卫星的GPS数据进行模拟定轨,同时借助全球差分GPS系统GDGPS,有效减少了GPS广播星历的误差,达到了30cm的实时定轨精度[8]。SAC-C卫星搭载的BlackJack GPS接收机接收了地面上注的RTG实时精密定轨软件,但无法将GDGPS的校正数据上传到卫星,卫星只能使用未校正的GPS广播星历,相较于地面模拟结果,实时定轨精度只达到了1.16m。
1.1.2 星间链路高精度定轨
星间链路定轨是通过最优参数估计法解算星间观测伪距方程和卫星动力学方程联立的关系方程,进而得出卫星动力学参数的一种定轨方法。其通常与星地测量相结合,将地面测站当作伪卫星建立星间观测伪距方程,对于无法全球布站进行定轨的卫星星座具有较大的技术优势。
美国于20世纪90年代开展了GPS导航卫星星间链路定轨的研究工作[9-10],基于UHF波段距离测量噪声达2.92m,当布设地面监测站数量为12个时,增加星间链路后轨道确定精度可提高10%[11]。早期GLONASS系统基于S波段的星间测量噪声为0.4m左右,后期通过激光测距使测量噪声降到10cm以下,轨道的定轨精度小于0.5m[11]。文献[11]利用北斗试验卫星Ka、1个地面Ka波段监测站和6个地面L波段监测站进行星间/星地精密定轨实验。单独采用Ka波段进行定轨,定轨误差小于3m,而采用Ka波段和L波段联合,定轨误差小于1m。但该实验的卫星星座内卫星数目较少,定轨弧段内一半以上时间链路数少于2条,制约了定轨精度的进一步提高。
从20世纪末21世纪初的全球通信铱星星座Iridium、全球星Globalstar到未来计划发射的太空互联网星座OneWeb、波音星座和SpaceX[1],特点都是卫星数目多,难以均通过地面进行测控管理,所以从铱星开始均带有星间链路功能。因此,LEO星座可以参照导航卫星星间链路的自主定轨模式实现自身的轨道确定[12]。文献[12]模拟了对48颗LEO卫星组成的轨道高度1080km,轨道倾角为84.6°,6个轨道面的低轨卫星星座的定轨,在只采用星间链路的情况下,定轨精度为20m量级,在加入地面观测站的情况下,定轨精度提高到10m以内。该实验模拟了地面观测站只观测某一轨道面某颗卫星的情况,且模拟用卫星数目较少,如果6个轨道面内均有卫星被观测站观测,定轨精度将进一步提高。
1.1.3 联合中继卫星高精度定轨
联合高精度定轨是在星载GNSS高精度定轨的基础上,利用TDRS中继卫星覆盖范围广的特点,通过数据中继卫星广播GPS差分校正数据和辅助数据,来校正GPS广播星历误差和空间环境造成的定轨误差等误差影响的一种定轨方法,该方法能有效提高星载GNSS定轨经度。
NASA计划利用已经建立的GDGPS,将GPS差分数据和完整性数据等通过数据中继卫星TDRS的地面站接收和发射到TDRS上。数据中继卫星TDRS将其广播发送到LEO卫星,LEO卫星利用这些数据和GPS接收机数据通过实时精密定轨软件RTG来进行高精度定轨[13]。NASA利用了Jason卫星的GPS接收机数据和RTG实时精密定轨软件,在地面模拟了基于数据中继卫星系统TDRSS的低轨卫星实时精密定轨,定轨精度小于10cm[14]。但由于TDRSS自身的缺陷,还无法在实际任务中传输校正数据到低轨卫星上提高实时精密定轨精度。NASA计划建立24×7的低轨卫星信标星座来配合原有系统降低端到端传输时延到7s[15],并配合下一代广播机制显著提高了为在轨卫星提供导航服务的可靠性和准确性[16],有效解决实际任务中校正数据的传输问题。
1.2 低轨卫星精密定轨发展趋势
低轨卫星精密定轨已经发展了很多年,但仍然存在很多问题。例如,在星载GNSS高精度定轨中,星上实时定轨由于星载计算机计算能力的限制,引力模型阶数不高,制约实时定轨精度的进一步提高、在地面模拟实时定轨和事后定轨时,对GPS的完好性状态和太阳辐射活动等因素考虑不足,影响定轨精度和在实际在轨任务中,中继卫星提供的差分校正等信息无法传输到低轨卫星进行实时精密定轨等,这些因素在一定程度上制约了低轨卫星精密定轨的发展。针对这些问题,低轨卫星精密定轨的发展方向有:
(1)用阶数较低的引力模型实现高精度实时定轨。在星载计算机性能有限的前提下,采用新的卡尔曼滤波算法如(EKF、CKF)等最优估计方法和约化动力法相结合,提高计算效率和精度;
(2)利用低轨卫星星座内星间链路和星座内卫星与导航卫星之间的星间链路来增强星载GNSS实时定轨,提高定轨精度;
(3)在地面模拟时考虑利用中继卫星转发的差分校正数据、GPS完好性数据和太阳活动等实时信息来提高模拟精度;
(4)设计新的中继卫星系统,有效减少传输延时和提高传输导航辅助信息的准确性和可靠性。
2 低轨卫星星座运行控制
2.1 摄动力影响分析
低轨卫星受到的主要摄动力是地球非球形摄动、大气阻力摄动、太阳光压摄动和日月三体引力摄动,除此之外,还包括地球反辐射压、相对论效应和地球固体潮等,由于这些摄动力产生的加速度量级相对于主要摄动力小得多,所以在低轨卫星摄动力影响分析中不予考虑。图1给出了轨道倾角30°,轨道偏心率0.001的低轨卫星摄动加速度量级随轨道高度的变化情况。从图1可以看出,地球非球形J2项摄动是主要摄动力,在轨道高度小于600km的情况下,大气阻力大于太阳光压、日月三体引力,同时,由于大气密度随轨道高度的增加呈现指数趋势衰减,大气阻力随着轨道高度增加迅速减小,在轨道高度大于900km时,大气阻力可忽略不计。

图1 低轨卫星受到的主要摄动加速度量级
2.2 低轨星座运行控制概念
在星座中,摄动力会使各卫星之间的相对位置不断漂移,从而导致星座整体结构的变化。这种变化积累到一定程度,会使星座几何构型遭到破坏,致使星座性能大幅度下降[17]。
对于低轨卫星星座,在寿命周期内整个星座的轨道高度会不断衰减。每个卫星的轨道高度衰减与整个星座一致,对于近圆轨道,偏心率和轨道倾角在卫星寿命周期内衰减程度很小,可忽略不计。因此,上述因素对低轨卫星星座空间几何构型均不产生影响,而产生长期影响的2个因素是升交点赤经和纬度幅角的长期变化。
2.3 关键技术
2.3.1 纬度幅角控制技术
由于低轨卫星受大气阻力摄动影响较大,可以利用大气阻力摄动来进行构型保持。该方法主要应用于同一平面内卫星间相位控制。
Leonard等人于1989年提出了利用差速拖拽的方式进行卫星编队轨道构型保持[18],ORBCOMM低轨卫星通信星座[19-20]、由12颗立方星组成的Plant Lab Flock 2p低轨卫星星座[21]均采用该方式进行轨道维持,星座构型保持。美国宇航局NASA于2012年制定了GYGNSS[22]计划,该卫星星座于2016年12月部署完毕,采用8颗无主动推力卫星均匀部署在同一轨道[23]。Finely等人以GYGNSS星座为对象系统,阐述了其利用大气阻力差速拖拽进行星座构型保持的方法[24]。
GYGNSS卫星具有在正常状态和高阻力状态姿态机动的能力,高阻力状态是通过姿态机动来改变锋面面积,使锋面面积变为正常状态下的6倍,从而大大增加了大气摄动的影响[23]。文献[24]以2颗卫星为例阐述了大气阻力差速拖拽具体实施过程。如果两颗卫星间相位角漂移量超出规定的最大漂移量,其中一颗卫星以另一颗卫星为参考,通过姿态机动切换为高阻力模式,使其轨道高度下降(百米级),导致其速度大于参考卫星,当达到相位角最大漂移率以下时,切换到正常状态。此时已机动卫星在不断远离参考卫星。参考卫星此时进行姿态机动切换到高阻力状态,在轨道高度下降到与已进行姿态机动的卫星相同高度时,姿态机动为正常状态,完成相位角漂移量的控制。
2.3.2 升交点赤经控制技术
在低轨卫星星座内,卫星的升交点赤经相对漂移同时受地球非球形摄动和大气阻力摄动影响。通过仿真分析,低轨卫星星座内卫星对同一轨道面和异轨道面升交点赤经相对漂移约为1度/年[25]。张洪华等人针对低轨近距离星座导出带有J2摄动项的相对运动方程[26]。Kechichian等[27]以轨道高度1600km的低轨Walker星座为例,通过建立受J2摄动影响的以星座平均漂移速度漂移的旋转坐标系来计算其他卫星的相对位置,并设立相对位置死区,通过双冲量机动来控制卫星的相对漂移。
2.4 纬度幅角与升交点赤经控制技术发展趋势
纬度幅角控制和升交点赤经控制是低轨星座构型控制的最关键因素。随着微小卫星和低轨卫星星座的发展,纬度幅角控制和升交点赤经控制均产生了许多新方法,但还存在着许多问题。例如,利用大气阻力差速拖拽的方式进行纬度幅角控制易受太阳活动的影响,具有一定的不确定性,升交点赤经控制模拟均在1000km轨道高度以上,尚无在800km及以下受大气阻力摄动和地球非球形摄动双重影响下升交点赤经的控制方法,这些因素均制约了低轨卫星星座运行控制的发展。针对这些问题,未来低轨星座运行控制的发展方向有:
(1)在纬度幅角控制中,将主动控制与被动控制相结合,减少由太阳活动等环境因素影响造成的不确定性;
(2)在升交点赤经控制中,建立在地球非球形摄动和大气阻力摄动双重影响下的控制方法;
(3)借鉴中高轨卫星星座参数偏置的控制方法,建立适用于低轨卫星星座的参数偏置方法。在入轨时计算好偏置参数,减少主被动控制次数,降低星座运行成本。
3 结束语
系统性地梳理了低轨卫星星座精密定轨和低轨卫星星座运行控制的概念、关键技术和发展趋势。首先分析了低轨卫星精密定轨方法,将其分为星载GNSS高精度定轨、星间链路高精度定轨和联合中继卫星高精度定轨。针对目前存在的问题,为下一步低轨卫星精密定轨提供了发展方向。而后介绍了低轨卫星星座运行控制的概念和摄动力,梳理了纬度幅角和升交点赤经控制方法的研究现状以及发展趋势。针对目前存在的问题,给出了低轨卫星星座运行控制下一步的发展方向。