声信号的MFDFA和SFLA-SVM算法的往复泵故障诊断
2020-04-28裴峻峰赵钧羡
裴峻峰,严 安,彭 剑,赵钧羡
(1.常州大学机械工程学院,江苏 常州 213000;2.江苏和信石油机械有限公司,江苏 盐城 224000)
1 引言
往复泵在石油钻井、注水、输油方面被广泛应用于高压下输送高粘度、大密度及高含沙量的液体。往复泵在运行中伴随着振动会有声音产生,泵阀等零部件在工作中受到外力的作用会产生撞击和振动,由此激发出声信号。当发生故障时,其声信号也会发生改变,所以声音和振动都蕴含着大量丰富的设备运动状态信息[1-3]。在对往复泵泵阀进行故障诊断时,声信号具有易采集特点,且声信号的采集方式不需要直接接触往复泵,采集设备简单、采集速度快、不影响往复泵的正常运作,应用广泛,所以拟测量声音信号用于试验研究。
往复泵的声信号是一种具有多种频率成分的不规则信号,采集到的声信号包含着的时域波形和变化趋势存在明显的分形特征。多重分形去趋势波动分析(MFDFA,即Multifractal Detrended Fluctuation Analysis)对采集信号的时间序列的非平稳趋势用去趋势过程进行消除,其次时间序列的多尺度下的标度行为通过多阶次的波动函数来剖析,能表明时间序列的分形结构,显示了非平稳时间序列的多重分形特征,解决了去趋势波动分析(DFA)的只能处理单重分形的缺陷[3]。对声音采集装置采集声音信号,传统的声信号的处理都是基于线性系统理论,声信号被分割为一些短段再加以处理,每一段被视为确定的平稳信号,经过处理以后产生一个新的依赖于时间的序列而用于描述声信号。由于声信号是一个复杂的非线性、非平稳过程,注入声门、声道以及辐射等影响因素很多,使得声信号处理变得困难。因此用MFDFA对声信号进行处理,证明了声音信号也具有多重分形特征,并对多重分形谱中的(α0,Δα,αmin,αmax,f(αmax),f(αmin),Δf)七个参数作为特征值,与SVM和基于改进的SVM结合,完成样本训练,对往复泵进行故障诊断。
支持向量机(SVM)是Vapnilk在统计学习的理论上提出的一种新的机器学习方法[4]。SVM中核函数参数g和惩罚参数C的选择会对分类结果产生较大影响,因此对SVM的核函数参数g和惩罚参数C进行遗传算法和混合蛙跳算法优化,增强诊断的正确率。结果表明,相对于普通SVM和GA优化的SVM,基于混合蛙跳算法优化的SVM具有收敛时间短,全局和局部搜索结合鲁棒性强等特点,能够提高分类正确率,同时也证明了MFDFA和SFLA—SVM能够对往复泵故障进行有效的识别。
2 MFDFA算法和SVM理论
2.1 MFDFA算法
假设非平稳时间序列xk(k=1,2,…,N),MFDFA计算步骤如下[5-7]:
计算信号对于均值的累积例差Y(i),

式中:x¯—信号 xk的均值。
(2)将Y(i)的长度N以尺度S划分为Ns段数据,S数据的选择过少不利于掌握规律,过多会产生过拟合,最大分割尺度一般推荐为N/20,因本数据量大,经过多次试验验证后得,采取S=300。

(3)用最小二乘法拟合每段数据的多项式趋势,然后计算其方差。

(4)yv(i)是第v个区间的m阶拟合多项式,选取的阶数越高,消除“趋势”效果越明显,但计算量也会变多。

(5)对于Ns各子区间,计算q阶波动平均值函数。均方根F(s,v)通过Ns个小区间的拟合,能将每个区间的趋势消除。

(6)函数Fq(s)是阶数q和时间尺度s的函数,Fq(s)与s之间满足有较高的稳定程度且存在幂律关系:

因此,在对数图中曲线拟合斜率得h(q),也被称为Hurst指数。序列是单重分形时,均方根F(s,v)在所有区间的标度一样,h(q)为定值,当序列不相关时,h(q)=0.5。当 h(q)随 q呈非线性关系时,则序列存在多重分形特性。
(7)对于多重分形序列,Hurst指数和基于配分函数方法中的尺度函数t(q)之间存在关系。

(8)由Legendre转换得到尺度指数t(q)与奇异指数α(和多重分形谱指数f(α)之间的关系。
将式(7)代入式(8)中得:


当时间序列是单一或多重分形,则多重分形谱是定值或单峰曲线,因此多重分形谱可以判断信号能否多重分形。
2.2 SVM基本原理
当样本集为线性可分时T={(Xi,Yi)},i=(1,2…m)。Xi∈Rn,yi∈{-1,1}SVM的核心思想就是构建一个最优的分类平面f(x)=WT+b=0,并尽可能的使分类间隔最大。当样本集为线性不可分时,可引入核映射方法转化为高维空间的线性可分问题来实现分类。少量样本的不可分是由非线性映射到高维特征空间造成的,考虑松弛变量ξi,惩罚因素C,拉格朗日系数αi,上述问题转换为:

最后得到所求的分类决策函数为:

核函数的选择是SVM中的关键,常用核函数有高斯径向基函数(RBF)、多项式核函数、Sigmoid核函数。以RBF作为核函数,因为RBF优化的参数较少,故选取RBF构造核函数。
2.3 SVM参数优化的方法
关于SVM惩罚参数c和核函数参数g的选取是影响故障识别的关键,提出遗传算法和混合蛙跳优化参数的两种方法,并将参数输入SVM、GA-SVM、SFLA-SVM进行对比,SFLA-SVM相对于GA-SVM具有全局搜索和局部搜索相结合特点,可以提高收敛最优解的概率,具有更佳的全局寻优能力和效率,不仅具有并行、调控搜索等特点,还有模因算法的串集搜索特点,验证了经过参数优化的SVM识别能提高正确率[8]。
2.3.1 GA参数寻优
遗传算法是模拟自然界遗传机制和生物进化论而成的一种并行随机搜索最优化方法,遗传算法的基本操作为选择、交叉、变异。GA优化设计SVM时先对解空间映射到编码空间,不同的编码对应不同问题的解。在产生的初代种群中进行淘汰机制不断产生更好的解,根据适应度函数来求适应度解并加以选择,借助遗传算子进行组合交叉和变异,产生新的解集,当产生的最后解满足优化准则时,则输出最佳个体,进而进行优化[8]。
为了提高SVM的诊断正确率,对SVM的惩罚参数c和核函数参数g进行优化,将惩罚参数c和核函数参数g作为输的入值输入GA进行优化流程图,如图1所示。
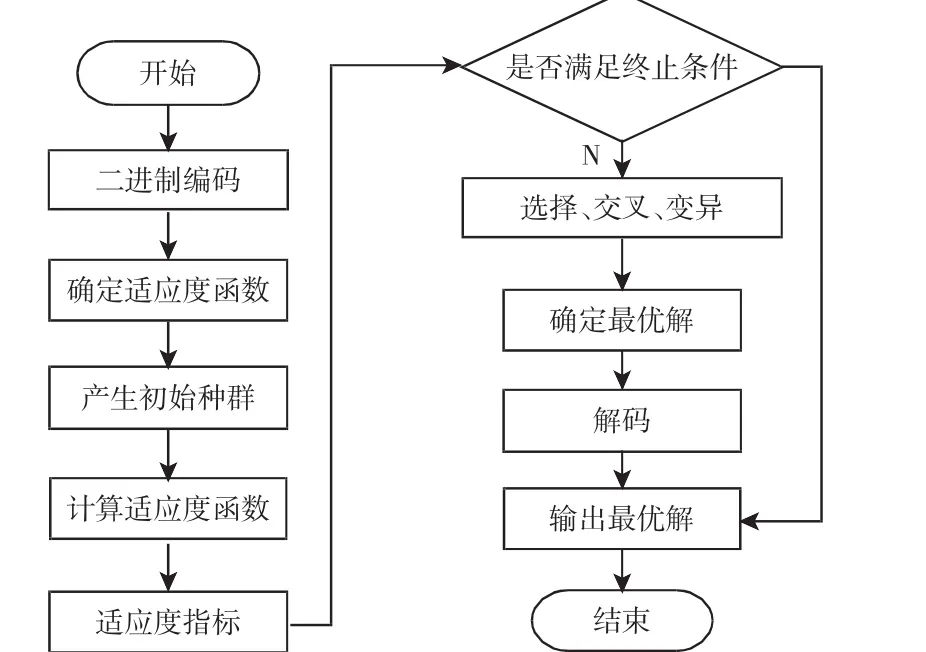
图1 利用GA优化SVM参数的算法流程图Fig.1 Optimization of the Algorithm Flow Chart of SVM Parameters by GA
2.3.2 SFLA参数寻优
2003年Eusuff和Lansey K提出一种群智能算法-混合蛙跳(SFLA)算法,本质上是采取混合多种群进化算法作为广度搜索的执行框架,同时结合粒子群(PSO)算法中局部搜索机制的元启发式模因算法。SFLA-SVM相对于GA-SVM具有全局搜索和局部搜索相结合特点,可以提高收敛最优解的概率,具有更佳的全局寻优能力和效率,不仅具有并行、调控搜索等特点,还有模因算法的串集搜索特点,下面是SFLA算法的基本步骤[9]:(1)初始化参数与总群,个体总数为N,个体的维数d,子群体个体数m,子群体个数n,子群体内局部的迭代次数cyc,全局混合的迭代次数cyc,青蛙的最大步长Ωmax最小步长Ωmin。(2)计算每一个青蛙的个体适应度值,根据适应度值对所有的青蛙个体进行排序。(3)将不同的青蛙依次划分到不同的子群中,划分n个子群。(4)对子群体中的最佳位置Xb和全局最佳位置Xg通过适应度值进行迭代更新,同时找出当前子群中最差的位置Xw。(5)对最差的个体Xw进行更新操作,如果更新后的new Xw的适应度值优于原来的Xw的值,则代替原来的最差个体,如果更新后的ew Xw的适应度值不优于原来的Xw,则随机产生一个新的Xw。(6)在局部搜索完成后,则规定的时间内完成全部迭代次数cyc,算法结束,输出最优值,否则,重新混合所有的青蛙,转至第二步重新计算。为了更好的提升SVM的识别正确率,对SVM中的惩罚参数c和核函数参数g进行优化,将惩罚参数和核函数参数作为输入值输入SFLA,下面是SFLA的算法流程图,如图2所示。
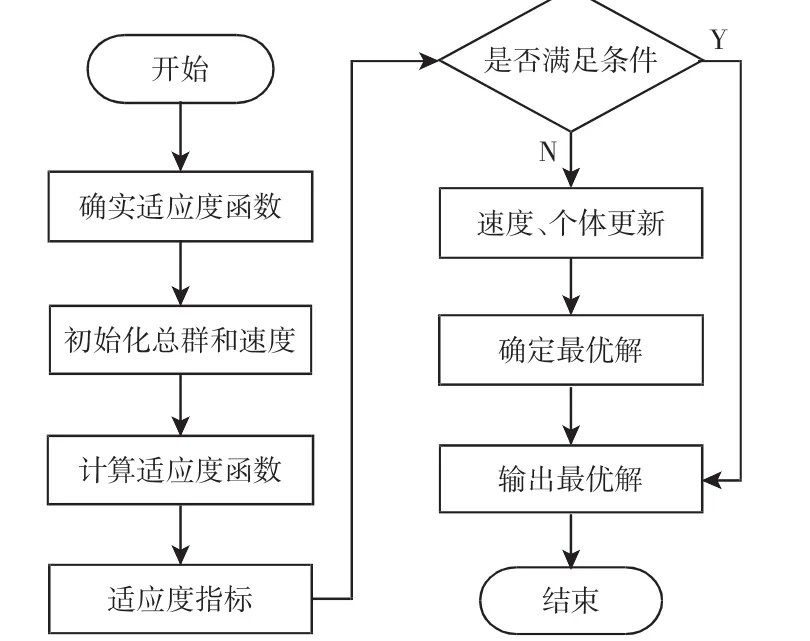
图2 利用SFLA优化SVM参数的算法流程图Fig.2 Optimization of the Algorithm Flow Chart of SVM Parameters by SFLA
3 往复泵声信号的采集
在进行声信号的采集时,因往复泵工作现场有其它环境噪音的影响和干扰,会降低所采集信号的精确度,给分析处理工作带来麻烦。为了解决这一问题,在研究过程中发明了一种监测往复泵液力端运动部件与流体泄漏声音的装置,如图3所示。

图3 监测往复泵液力端运动部件与流体泄漏声音装置Fig.3 Device for Monitoring the Moving Parts of the Hydraulic End of the Reciprocating Pump and the Sound of the Fluid leakage
局部隔音采集端具有隔音效果好、质量轻、可以便携、安装方便等优点,工作时不影响往复泵泵阀的正常工作,其底部敞开放置在阀盖上,将传声器放置在装置中,从而将外部噪音隔离,有效地隔离了周围环境噪音的干扰,而使往复泵液力端的声音有效地被声音传感器有效采集,这样既保证了隔音效果也不影响目标声音信号的采集。如3图所示。11、12、13、14从外向里的布局可以达到很好的隔离外界噪音并采集泵阀的声音信号作用。

图4 往复泵测试现场图Fig.4 Test Site Map of Reciprocating Pump
采用声音信号采集装置由以下几部分构成,包括往复泵BW-250,爱华AWA6290M+信号采集仪,信号采集系统。选取BW-250型往复泵进行故障诊断实验,分别对往复泵的液力端进行弹簧故障、阀盘故障和无故障三种情况的声信号采集,测试时将传声器放置在自制的隔音装置中,测取泵内的声信号。往复泵的转速为560r/min,采集仪器的采样频率为48000Hz,提取各种状态数据样本总长度为8000,采集的手段和现场,如图4所示。在正常、阀盘磨损故障和弹簧断裂故障三种工况下无隔音设备和有隔音设备时采集到的声信号。其原始信号图,如图5、图6所示。从图中可以看出,与无隔音装置时采集到的原始声信号相比,有隔音装置时采集到的信号更加清晰,有效屏蔽了大部分周围的环境噪音。因此使用有隔音装置时采集到的信号进行处理更加有效。
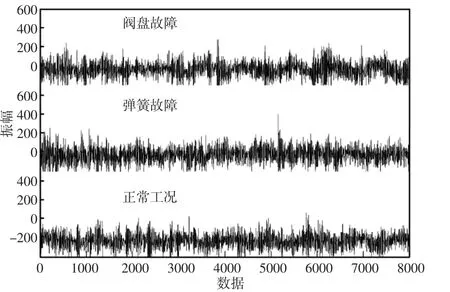
图5 无隔音装置声音信号Fig.5 Sound Signal Without Sound Insulation Device
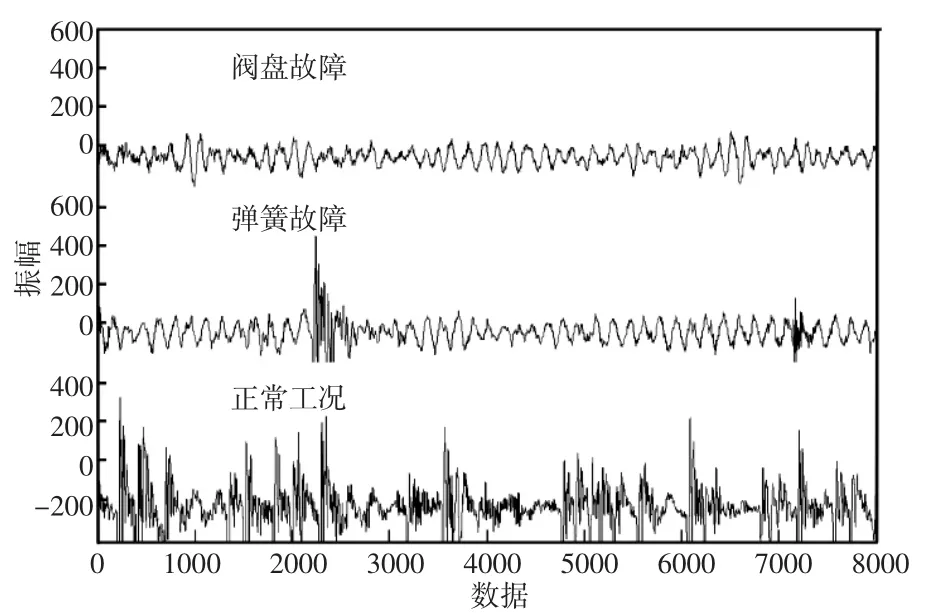
图6 有隔音装置声音信号Fig.6 Sound Signal WithSound Insulation Device
4 基于MFDFA和SFLA-SVM的往复泵声信号应用
4.1 数据分析
综上所述,对有隔音装置下三种工况采集的声音时域信号进行处理,从图6中的时域信号图中无法直接识别出具体的故障类型,因此对采集的数据进行MFDFA分析,得到q阶Hurst指数,q-t(q)拟合曲线和多重分形谱图。从图7可以看出,在三种状态下,Hurst指数随q的变化呈非线性变化趋势,因此三种状态下时间序列的声信号存在多重分形特性,这也是导致往复泵声信号出现多标度的原因。利用MFDFA方法根据式(7)将Hurst指数计算尺度指数t(q)和q之间的拟合关系结果,如图8所示。从图8可以看出,提取随机游走之后的三种状态声音信号的斜率随着q的增大逐渐相等,拟合效果比较理想,尺度指数t(q)是q的凸函数与递增函数,具有较强的非线性关系,显示了MFDFA能声信号能消除噪声趋势,表明了往复泵在这三种状况下的运动过程为多重分形运动。
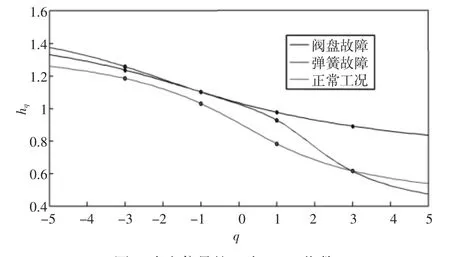
图7 声音信号的q阶Hurst指数Fig.7 q-Order Hurst Index of Sound Signal

图8 q-t(q)拟合曲线Fig.8 q-t(q)Fitting Curve
根据式(8)和式(9)得出奇异指数α(q)和多重分形谱指数f(α)之间的关系谱图,得出三种状态下的往复泵声音信号的多重分形谱,如图9所示。
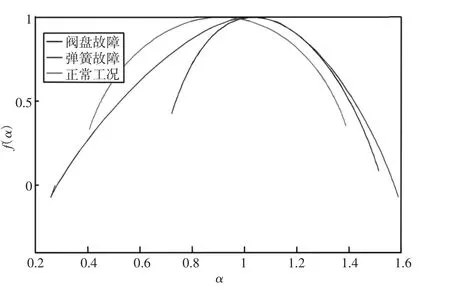
图9 多重分形谱Fig.9 Multifractal Spectrum
从图9可以看出,不同声音信号的动力学机制不一样,三个图谱有明显的差异,不同状态下的各个谱图的形状和宽度均不相同,奇异指数α的变化范围较大,再次说明往复泵运行过程是多重分形运动。
4.2 特征值的选取
因为声信号的动力学机制不同所以得到多重分型谱也不同。根据对图9的多重分形谱分析,选取7个参数(α0,Δα,αmin,αmax,f(αmax),f(αmin),Δf)为声信号的特征值。在小范围内,分形体生长概率的高低是通过奇异指数α来体现的。奇异谱f(α)是奇异指数α的分维分布函数,反应了奇异指数α的分布情况从,其中7个参数可以直接或者间接的从多重分型谱图中所得。α0为多重分形谱最大值时对应的奇异标度值,多重分形谱宽Δα=αmax-αmin反应了概率分布的不均匀程度,分分布均匀程度与Δα成反比,分形强度与成正比。左端点αmax和右端点αmin分别对应最大和最小奇异标度值。fmax和fmin代表多重分型谱分形维的最大和最小值,Δf=f(αmax)-f(αmin)反应了声音信号的大小峰值所占的比例,从图9中可直接观察到,三种工况的多重分形谱差别很大,不同信号下的的多重分形谱参数都不一样,因此选择上述7种多重分形谱参数作为声信号故障特征量。部分特征参数,如表1所示。从表1可以看出,阀盘和弹簧故障的α0和αmax值和正常工况相比有一定程度的增加,三种工况下的弹簧故障的 αmin、f(αmin)、f(αmax)、Δf最小,阀盘故障的Δα最小,且提取的特征值数据差异明显,可以给出较好的定量分析。说明利用多重分形谱提取的特征值可以较好地反映故障信号的特征,可以用来进行往复泵故障诊断[10]。
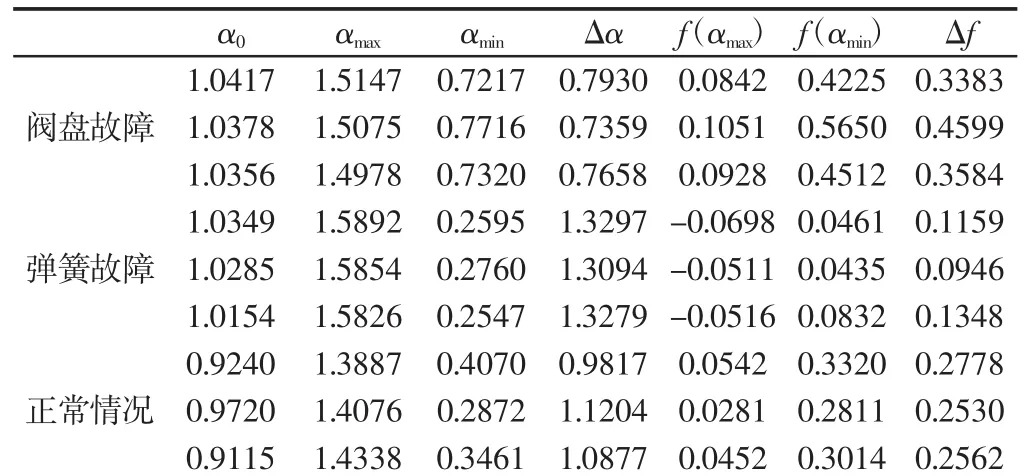
表1 声音信号特征参数Tab.1 Sound Signal Characteristic Parameters
4.3 故障识别
将三种运行状态的声音信号每种分别随机选取40组,各随机选取其中20组信号作为训练集,其余作为预测集,共120组信号。将选取的正常样本视为1,阀盘磨损故障样本视为2,弹簧断裂故障样本视为3。
为了寻求最佳的诊断效果,将提取的特征参数输入SVM、GA-SVM、SFLA-SVM,对故障进行识别比较。根据经验,对没有优化的SVM的惩罚参数和核函数的选取,分别取值c=2,g=1进行训练。然后对SVM的惩罚参数和核函数进行GA和SFLA的优化处理,经过200次的迭代,GA-SVM的惩罚参数为1.0602,核函数为14.284,SFLA-SVM的惩罚参数为0.1,核函数为6.2357。
使用SVM、GA-SVM、SFLA-SVM算法得到的故障识别情况,如图10~图12所示。三种方法得到的诊断情况,如表2所示。

图10 SVM故障识别情况Fig.10 SVM Fault Identification
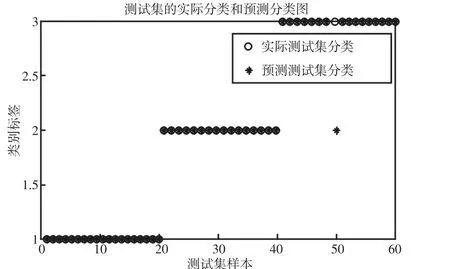
图11 GA—SVM故障识别情况Fig.11 GA-SVM Fault Identification
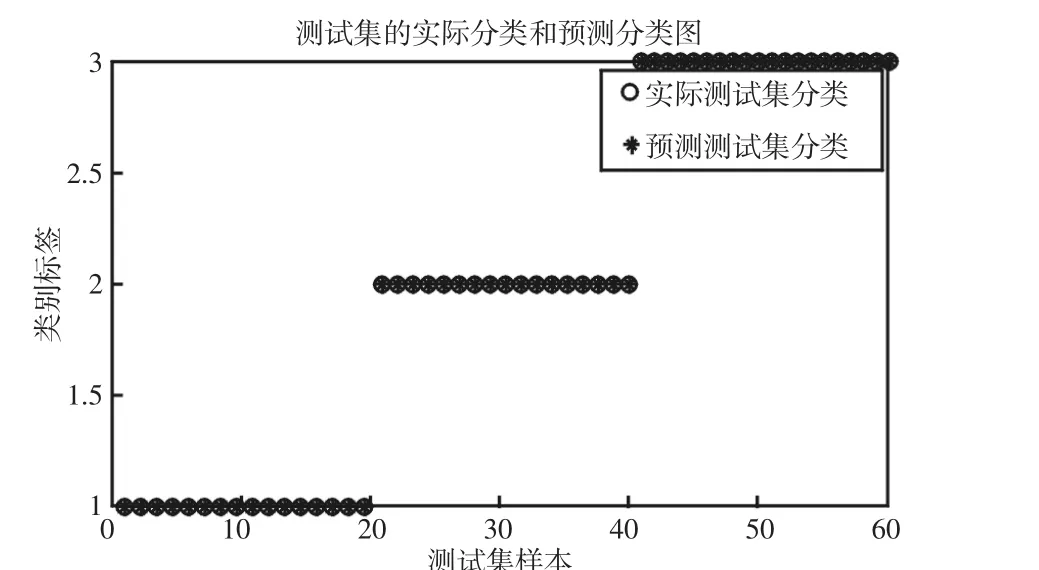
图12 SFLA—SVM故障识别情况Fig.12 SFLA-SVM Fault Identification

表2 不同核函数SVM的识别结果Tab.2 Recognition Results of Different Kernel Functions SVM
从表2可知,经过SFLA算法优化SVM均可识别出60组测试样本,故障类型与诊断结果一致,测试准确率为100%,诊断结果比较理想,相比于经过GA-SVM优化(正确率为98.33%)和未经优化情况下(正确率为90%),其诊断效果显著提高,因此SFLASVM方法的诊断效果最好。
5 结论
提出基于MFDFA和SFLA-SVM算法结合的往复泵故障诊断方法。通过研究工作得出以下结论:
(1)所研发的监测往复泵液力端运动部件与流体泄漏声信号的装置是有效的,与无隔音装置时所采集到的原始声音信号相比,有隔音装置时采集到的信号更加清晰,有效屏蔽了大部分周围的环境噪音,为进一步使用DFMFA方法准确提取特征值分析提供了良好基础;
(2)利用MFDFA方法提取随机游走有效去除了声音信号中的趋势波动,将去除趋势的波动之后的时间序列声信号经过提取随机游走、计算局部均方根,q-t(q)拟合以及对多重分形谱的分析,能够明显的表明往复泵的声音信号示隐藏在多重分形特性;
(3)通过计算,可以直观地看到往复泵在不同状态下声音信号的多重分形谱有明显的区别,提取的特征参数具有明确的物理意义,可以准确地将不同状态的声音信号通过不同参数进行量化,从多个维度反映不同信号的故障特性;
(4)经过对多重分形谱提取的特征值分别用SVM、GA-SVM优化、SFLA-SVM三种方法进行分析计算,证明SFLA-SVM算法得到的故障诊断效果最好。
研究表明,基于声音信号的MFDFA及SFLA-SVM算法的方法是一种行之有效的往复泵故障诊断新方法。
