双转台五轴立式机床专用后置处理算法
2020-04-28韩飞燕张武刚
韩飞燕,郭 卫,张武刚,张 武
(西安科技大学机械工程学院,陕西 西安 710054)
1 引言
在数控编程中,根据数控机床的运动结构和数控系统的指令格式,把工件坐标系中的刀位数据转换为机床能够识别的1加工代码的过程称为后置处理。后置处理作为CAM自动编程软件与数控设备联结的纽带,是数控编程技术的重要组成部分,影响着数控编程技术的使用效果、零件的加工质量和机床运行的可靠性[1]。
后置处理技术的研究一直备受关注,各CAD/CAM编程软件厂家都研发了通用后置处理系统,然而,大多数用户对CAD/CAM软件的使用集中在CAD模块,对CAM模块的使用率并不高,这是因为CAM软件只配备了通用后置处理,许多特定结构的数控机床无法使用CAM模块进行后置处理,大大影响CAM模块的应用效果。此外,许多学者对后置处理技术也进行了广泛的研究,文献[2]采用机构学理论,建立了一种通用五轴机床的机构学模型,并提出通用五轴机床后置处理方法。文献[3]提出了H5-800五轴卧式数控机床的专用后置处理算法。文献[4]分析了双转台五轴机床的运动关系,开发了UCP600五轴机床专用后置处理程序。文献[5-7]提出了DMU系列非正交双转台五轴机床的后置处理方法。文献[8-9]提出了非正交转台结构、非正交摆头结构五轴机床的后置处理方法。随着数控机床与数控系统的迅速发展,具有不同结构和固定加工功能的五轴机床得到了广泛应用。一般来说不同结构的五轴设备后置处理方式也不同[10]。五轴机床后置处理的复杂性体现在带旋转轴的刀位坐标变换和刀位旋转角计算上,这是开发数控机床后置处理程序必须要解决的核心技术。研究了一种WABECO双转台五轴立式数控机床的专用后置处理算法。基于逆运动学理论,在分析WABECO双转台五轴机床的结构关系和运动特点的基础上,推导该类机床后置处理的转角计算公式、坐标变换计算公式,基于C++语言开发出的数控机床专用后置处理软件,最后通过复杂叶轮零件的仿真加工与试验,验证了所提方法的有效性。
2 双转台五轴立式机床的运动学求解
在进行数控编程时,通常视工件不动,由刀具运动来完成加工,经过处理可得到一个不针对具体机床型号的中间文件,即CLS刀位文件,CLS刀位文件包括刀具中心点坐标值和刀轴矢量。在实际应用中,机床运动的实现方式各不相同,有的运动由刀具实现,有的运动由工作台实现。在三个移动轴(X、Y、Z)联动情况下,工艺员通常不需要关心是刀具运动还是工作台运动,因为机床的坐标系及其运动方向是按国际标准来定义的。五轴数控机床的结构主要有三种:双转台式、双摆头式和摆头+转台式。那么,五轴联动的回转轴运动就包括刀具不动、工作台摆动+转动或者刀具摆动、工作台回转。这就要求在后置处理过程中,针对不同情况分别进行计算,首先,将CLS文件中的刀位信息转换为机床移动坐标及其相应的旋转角度,再通过代码转换将它们转换成指定数控机床能识别的加工程序。
2.1 机床运动关系分析
机床的运动学求解主要包括转动轴的转角计算和经转动后移动坐标的计算。对于不同类型数控机床,其运动关系有所不同,对应的运动学求解算法也是不同的。下面以WABECOH双转台立式五轴数控机床为例,分析后置处理坐标变换以及回转角度的计算方法。WABECOH双转台五轴数控机床的结构示意图,如图1所示。
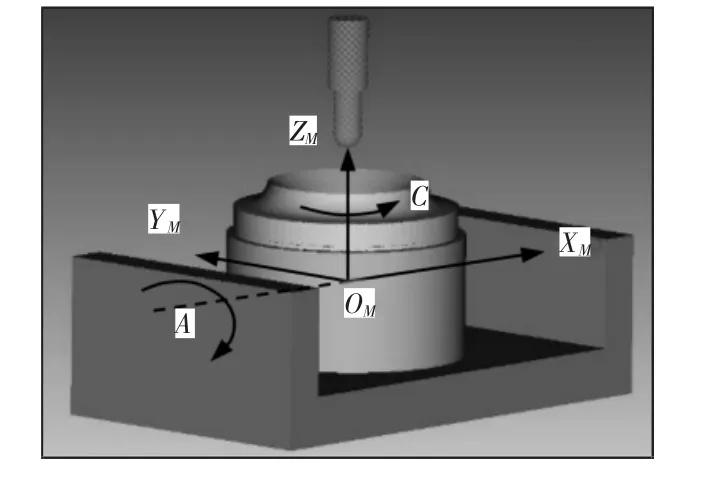
图1 双转台立式五轴机床结构示意图Fig.1 Structure of Dual-Rotary Tables Five-Axis Machine Tool
如图1所示,WABECOH双转台立式五轴数控机床包括两个转动角度A、C和三个移动坐标X、Y、Z,并且A、C回转轴相交于一点。

图2 双转台五轴加工刀轴矢量转动角度Fig.2 Rotation Angle of Cutter Orientation in Dual-Rotary Tables Five-Axis Machine Tool
设机床坐标系OMXYZ,工件坐标系OWXYZ,如图2所示。转动工作台C的回转轴与Z轴重合,摆动工作台A的回转轴与X轴重合,A与C的方向分别符合右手螺旋法则,OMXYZ坐标系的原点在A、C回转轴的交点上。工件坐标系OWXYZ与机床坐标系OMXYZ的Z轴方向一致,其余的两个移动坐标轴分别平行,OWOM=d,工件可绕OWXYZ坐标系的X轴转动A(-131°≤A≤131°)角,工件可绕OMXYZ坐标系Z轴转动C(0≤C<360°)角。刀具参考点Oc在工件坐标系OWXYZ中的坐标为(xc,yc,zc)。刀轴矢量l为单位矢量(一个位于刀具的轴线上,从刀具中心点指向刀柄方向的矢量),在工件坐标系OWXYZ中的坐标为(lx,ly,lz)。为便于计算,以刀具中心点Oc为原点建立刀轴矢量坐标系OCXYZ,其与工件坐标系中OWXYZ各相应轴平行。根据上述已知条件,计算机床的移动坐标X、Y、Z及相应的转角A、C。
2.2 工作台旋转角度计算
WABECOH双转台立式五轴数控机床有两个转动角度,一个是旋转工作台绕Z轴的转动,定义其转角C以逆时针方向为正。一个是摆动台绕X轴的旋转,其转角A以逆时针方向为正。将刀轴矢量l绕Zc轴逆时针转动C角到YcZc平面上,获得矢量l′,再将矢量l′绕Xc轴逆时针转动A角到与Zc轴方向一致,如图2所示。这样就实现了刀轴矢量的转换,即刀具相对工件的运动。对于双转台式五轴数控机床,为实现上述转换,工作台需绕Z回转轴逆时针转动C角,摆动台需绕X回转轴逆时针转动A角。那么A、C的计算公式如下:

2.3 机床移动坐标计算
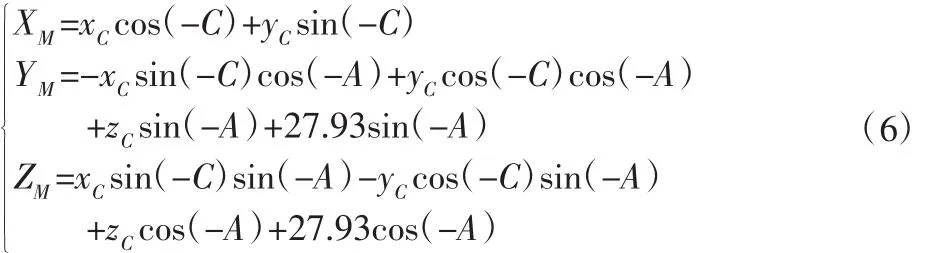
求刀具中心点OC(xC,yC,zC)经过工作台转动后,在机床坐标系OMXYZ的位置坐标,即机床移动坐标X、Y、Z。将工件坐标系OWXYZ平移到机床坐标系OMXYZ,对于WABECOH双转台立式五轴数控机床,其工件坐标系原点到机床坐标系原点的距离为27.93mm,移动变换矩阵为:

刀具绕Z轴旋转C角,相当于机床工作台反方向转动-C角,那么转动变换矩阵为:

刀具绕X轴旋转A角,相当于机床工作台反方向转动-A角,那么转动变换矩阵为:

而[XMYMZM1]=[xCyCzC1]T1T2T3,展开可得:
3 WABECOH五轴数控机床专用后置处理程序实现
WABECOH五轴立式数控机床属于双转台加工中心,该机床的控制系统是mach3。依据解释执行原则,后置处理程序采用式(1)、式(2)、式(6)进行坐标变换部分程序设计,根据机床控制系统mach3的要求进行代码转换部分程序设计。后置处理具体步骤为:(1)读取刀位文件中的刀位点信息,并判断刀位文件是否读取结束,如果未结束,转到(2),否则,退出;(2)根据机床运动关系进行坐标转换计算;(3)结合机床数控系统特性生成G代码;(4)输出加工代码,返回(1)。根据后置处理步骤以及所提算法,利用C++程序编写WABECOH五轴立式机床专用后置处理程序,并设计软件界面,创建可执行文件。在进行数控加工G代码计算时,打开后置处理可执行文件WABECOH加工中心后处理软件,然后读入刀位文件中的信息,经过代码转换、坐标变换计算,输出数控加工的G代码。
4 仿真加工与实验验证
为了验证所提后置处理算法的正确性,以叶轮为对象,如图3所示。将UG/CAM模块生成的叶轮流道加工CLS文件采用WABECOH加工中心后处理软件进行后置处理,获得数控加工的G代码,并分别进行了仿真加工与实验验证。

图3 叶轮模型Fig.3 Impeller Model
4.1 仿真加工
根据WABECOH五轴立式数控机床的运动关系,在VERICUT仿真软件中构建该机床的运动仿真模型,如图4所示。将UG/CAM模块生成的数控加工刀位轨迹CLS文件,利用WABECOH加工中心后置处理软件的可执行文件进行后置处理,生成数控机床能够识别的G代码,G代码中包含程序头,机床运动时所需的3个移动坐标xyz以及转动坐标A、B。

图4 VERICUT下的WABECOH五轴立式数控机床运动仿真模型Fig.4 Motion Simulation Model of WABECOH Five-Axis Vertical CNC Machine Tool in VERICUT
然后,输入后置处理后求得的零件数控加工G代码,并进行加工仿真,其结果,如图5所示。由仿真结果可以看出,叶轮流道表面以及两侧压力面与吸力面上切削轨迹均无明显过切或欠切痕迹,说明刀具与流道两侧叶片及底面未产生干涉,能够确保叶轮流道的几何形状,证明所提的后置处理算法正确、可行。

图5 VERICUT仿真加工结果Fig.5 Simulation Processing Results by VERICUT
4.2 实验验证
为了进一步验证所提的专用后置处理算法,在WABECOH五轴立式数控机床上进行叶轮流道的实际加工来验证算法。将UG/CAM模块生成的叶轮流道加工轨迹的CLS文件进行后置处理,然后将获得的G代码输入到WABECOH五轴立式数控机床,进行叶轮流道的实际加工。当设定主轴转速为1000rpm,进给速度为800mmpm时,其加工结果,如图6所示。由加工结果可知,加工后的叶轮流道几何形状与叶轮理论模型基本符合,说明后置处理所得的G代码有效、可行,能够保证叶轮流道加工中走刀路径正确无误,很好地解决了WABECOH双转台五轴数控机床的后置处理问题。此外,在实际加工过程中,机床各轴的运动关系正确,未出现干涉、撞刀以及明显的机床振动等现象,证明了该后置处理算法的正确性。

图6 叶轮加工结果Fig.6 The Impeller Machining Result
5 结论
(1)对WABECOH双转台五轴立式数控机床运动学求解进行了详细介绍,给出了该机床后置处理的坐标转换与转角计算公式,开发了WABECOH五轴数控机床专用后置处理程序。(2)基于所建立的后置处理方法进行了叶轮类复杂零件的加工仿真与实验验证。结果显示,在WABECOH五轴数控机床上的应用表明,所开发的专用后置处理程序生成的加工代码符合五轴联动的要求,可解决该数控机床的后置处理问题。
