弱光束条件下森林区域光子云去噪算法精度研究
2020-04-27黄佳鹏邢艳秋马建明
黄佳鹏 邢艳秋 秦 磊 马建明
(东北林业大学森林作业与环境研究中心, 哈尔滨 150040)
0 引言
冰、云和陆地高度卫星一代/地学激光测高系统(Ice, cloud, and land elevation satellite-1, ICESat-1/Geoscience laser altimeter system, ICESat-1/GLAS)在测量全球冠层结构参数方面取得了成功。作为后续星的冰、云和陆地高度卫星二代已经于2018年9月发射成功,ICESat-2搭载了先进地形激光高度计系统(Advanced topographic laser altimeter system,ATLAS),该系统的主载荷采用了微脉冲光子计数技术,具有高重频、高灵敏性的特性,可以有效探测从地球表面反射回来的光子,通过接收返回的光子信号描述地表的冠层情况[1-3]。不同于ICESat-1/GLAS的低频率发射方式(40 Hz),ATLAS激光发射频率为10 kHz。与ICESat-1/GLAS单波束发射方式不同,ATLAS激光发射模式为3对6波束发射方式,每对光束由强光束和弱光束组成,其中强光束与弱光束的能量分别为0.12 mJ和0.03 mJ,两者能量比为4∶1,两种光束均可以用于森林冠层高度的测量,且强弱不同的光束分布形式可以为监测斜坡高程变化、冠层粗糙度变化提供科学数据[1,4-5]。但是,ATLAS系统的高灵敏度特性将导致系统接收来自于外界和系统本身的噪声光子,严重影响后续冠层高度的信息提取[6]。为此,需加强不同强弱光束条件下去噪算法的研究,以去除噪声光子,进而获取更高精度的冠层高度信息。
为研究ICESat-2星载光子云去噪算法,研究者分别针对机载平台的单光子激光雷达(Single photon LiDAR, SPL)[7]、斜坡成像多极化光子计数激光雷达(Slope imaging multi polarization photon-counting LiDAR, SIMPL)[8-9]、多高度计波束激光雷达(Multiple altimeter beam experimental LiDAR,MABEL)[10-11]、MATLAS数据,进行了光子云去噪试验。其中,文献[11]提出了一种基于密度算子的局部距离统计算法,以强波束类型的MATLAS数据作为试验数据,证明该算法可以有效地去除强波束类型条件下的噪声光子。文献[12]提出了一种基于贝叶斯方法的单光子噪声滤波算法,以MABEL作为试验数据,通过试验证明该算法可有效区分噪声光子和信号光子。文献[13-14]提出基于局部距离统计算法对机载MABEL光子云数据进行去噪处理,结果表明,该算法能有效剔除夜间条件下的大部分噪声光子。文献[15]以SPL数据作为试验数据,提出了一种基于体素的空间滤波方法,该方法在保持SPL数据空间完整性的同时,可对平滑地表的噪声光子进行有效去噪。文献[16]提出了一种改进的基于密度的聚类 (Density-based spatial clustering of applications with noise, DBSCAN) 算法,该算法采用椭圆形状计算各光子之间距离,试验结果证明改进的DBSCAN算法在平坡试验区域具有较好的去噪效果。文献[17]以强波束类型的MATLAS数据作为试验数据,采用不同方式的椭圆形状计算各光子之间的距离,证明采用水平方式的椭圆搜索域的DBSCAN算法更适于平坡的光子云去噪。文献[18]以粒子群优化(Particle swarm optimization, PSO)模型作为优化方式,改进了需人工确定核心参数的DBSCAN光子云去噪算法,以MATLAS数据作为试验数据,证明其在强光束条件下的光子云去噪试验中可以获得较好的去噪效果。
综上所述,在强光束条件下,光子云去噪算法可完成平滑地表的光子云去噪试验,且可以获得较高的去噪精度。但是在弱光束条件下的森林覆盖区,由于弱光束工作特性导致噪声光子密度特性相对信号光子并不明显,加之噪声光子在冠层上空、冠层内部以及地面以下均有分布,严重影响了光子云去噪算法对目标光子信号的去噪精度。由已有研究可知,算法并未单独针对弱光束条件下的森林覆盖区进行光子云去噪研究,缺少其在弱光束条件下森林研究区的去噪精度评价,且之前的光子云去噪算法并未结合研究区的不同特点进行去噪效果分析,缺少对算法的综合评价。
为探究不同去噪算法在弱光束条件下森林覆盖区的光子云去噪效果,本文探究局部距离统计算法、DBSCAN算法和PSO-DBSCAN算法在弱光束条件下森林区域的光子云去噪效果,通过不同研究区的去噪统计指标,分析3种算法在弱光束条件下,森林覆盖区的光子云去噪效果,并结合研究区的地形、植被覆盖度、太阳高度角等特点对光子云去噪算法的去噪效果进行综合性分析。
1 试验数据与研究区
1.1 试验数据
为评价ATLAS光子云数据的性能,美国国家航空航天局(National Aeronautics and Space Administration, NASA)根据ATLAS仪器模型参数通过简化ATLAS运行轨迹、降低空间分辨率、信号光子二次采样等步骤调整MABEL光子云数据的密度,生成模拟ATLAS数据的MATLAS数据[10-11,13]。MATLAS数据示意图如图1所示,图1a为ATLAS的运行轨迹示意图,在该运行模式条件下,每对光束中沿轨左侧为弱光束足印,沿轨右侧为强光束足印,图1b为ATLAS足印示意图[3]。图2为强、弱光束条件下Portland研究区的MATLAS光子云分布示意图,本研究将每束光子云分布形式转换为沿轨的剖面形式展示。对比强弱激光束光子分布可知,图2a为弱光束情况,图中共有光子2 203个,其中信号光子1 931个,噪声光子为272个,信噪比为7∶1;图2b为强光束情况,图中共有光子7 774个,其中信号光子7 502个,噪声光子272个,信噪比为28∶1。数据显示弱光束条件下的信噪比小于强光束条件下的信噪比,特别是冠层光子表现更为明显。表1为ATLAS强弱光束参数。
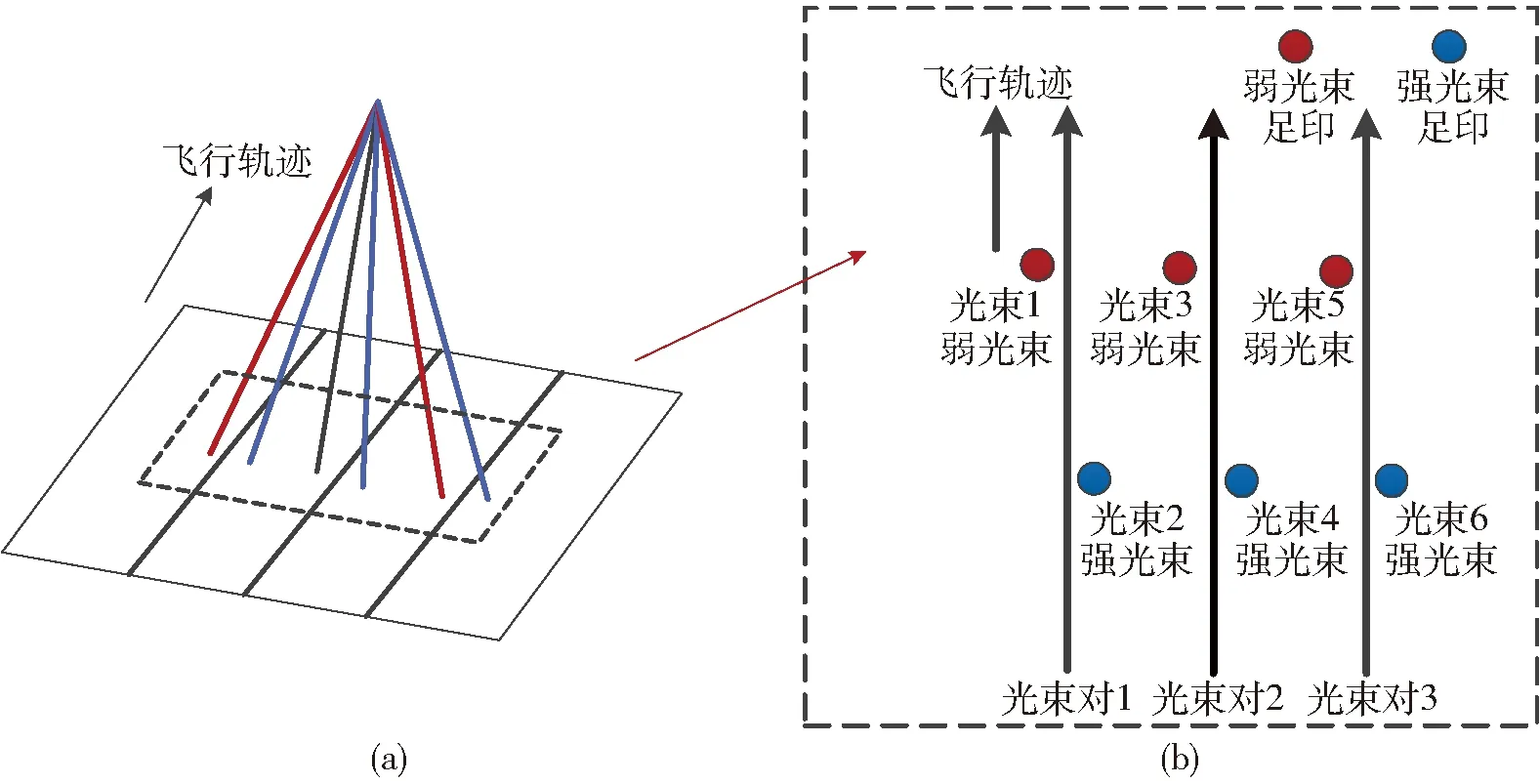
图1 MATLAS数据示意图Fig.1 Schematic of MATLAS
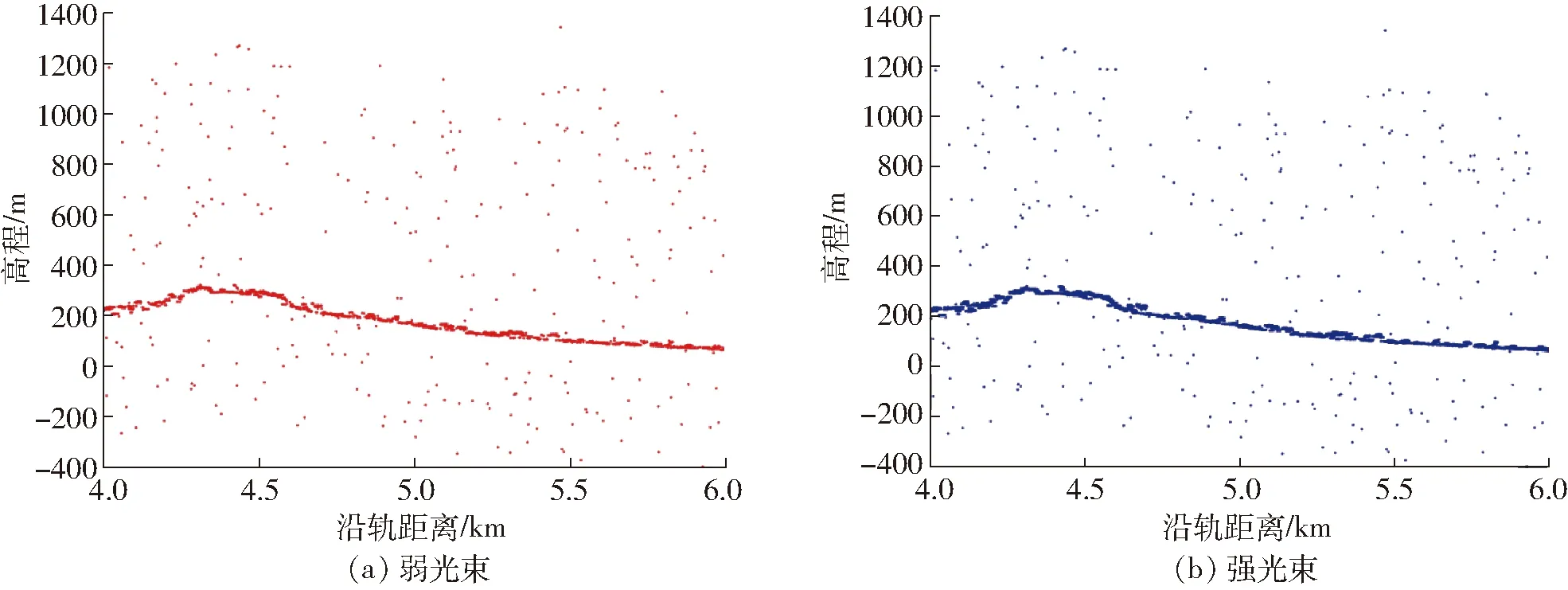
图2 Portland研究区的MATLAS光子云分布示意图Fig.2 Schematics of MATLAS photon cloud data in Portland research area

表1 ATLAS强弱光束参数Tab.1 Statistic of ATLAS strong and weak beam parameters
1.2 试验区域
为验证不同光子云去噪算法在弱光束条件下森林覆盖区的去噪精度,本研究选择不同森林覆盖区域作为研究不同MATLAS光子云去噪算法去噪精度的研究区。选择研究区域为NASA网站(https:∥icesat-2.gsfc.nasa.gov/legacy-data/matlas/matlas_docs.php)上公布的研究区主要覆盖物为植被的光子云数据。根据MATLAS植被区域文档说明,选择位于美国的Virginia、East Coast、West Coast Transit和Portland作为研究区。图3为研究区位置示意图及对应研究区上空机载飞行轨迹示意图。为研究地形特点、植被覆盖度特点、噪声特点对光子云去噪算法去噪效果的影响,统计各研究区的太阳高度角等特性如表2所示。
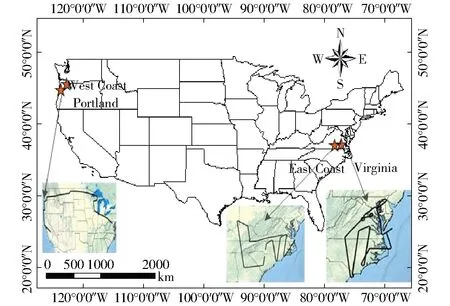
图3 研究区位置示意图Fig.3 Location of study area
2 研究方法
2.1 光子云去噪算法
选择局部距离统计算法、DBSCAN算法和PSO-DBSCAN算法作为研究对象,评价其在弱光束条件下森林区域的去噪效果。
2.1.1局部距离统计算法
局部距离统计算法核心为通过统计各光子间的距离频数,设定噪声阈值,通过噪声阈值区分信号光子与噪声光子,具体流程为:
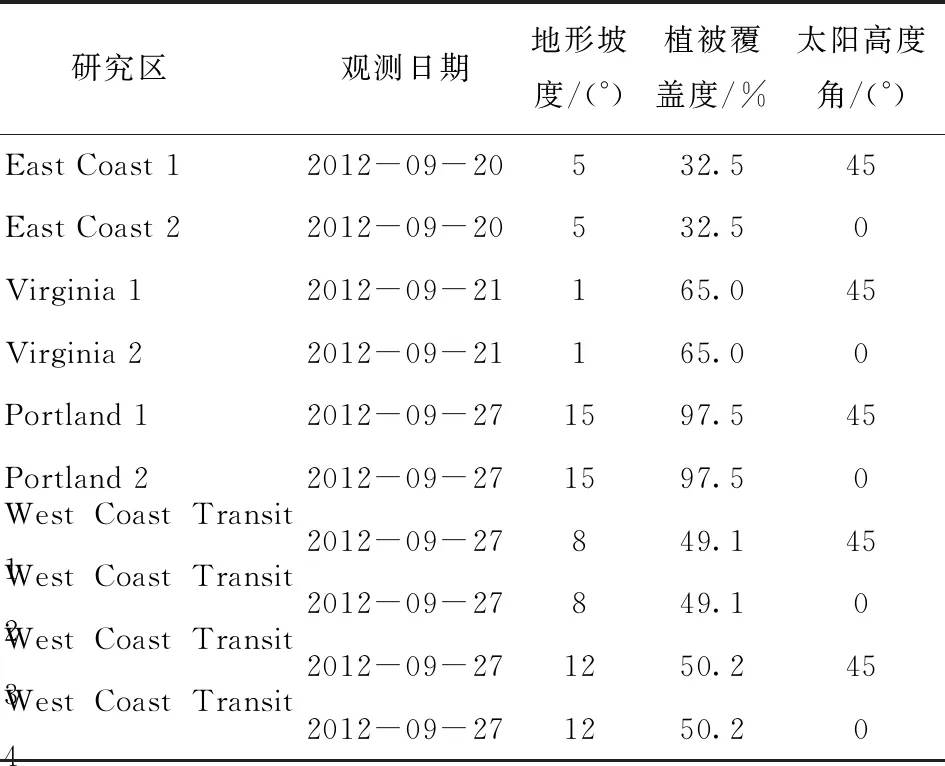
表2 试验区域统计Tab.2 Statistics of study area
(1)统计光子云中每个光子到周围最临近的k个光子的总距离l(单位: m),计算式为
(1)
式中xi、xj——沿轨距离,m
hi、hj——光子云高程,m
未去噪前Portland研究区的光子云如图4a所示,生成光子云频数直方图如图4b所示。
(2)设置阈值剔除噪声光子。对其均值与标准差通过光子云局部统计进行估算,选定均值与n倍标准差之和作为噪声阈值。
(3)若光子总距离小于噪声阈值,则判定该光子为信号光子;否则,判定其为噪声光子[13-14]。
局部距离统计算法对于人工设定参数k、n具有较强依赖性,本研究参照文献[13-14]中的方式进行参数设定。
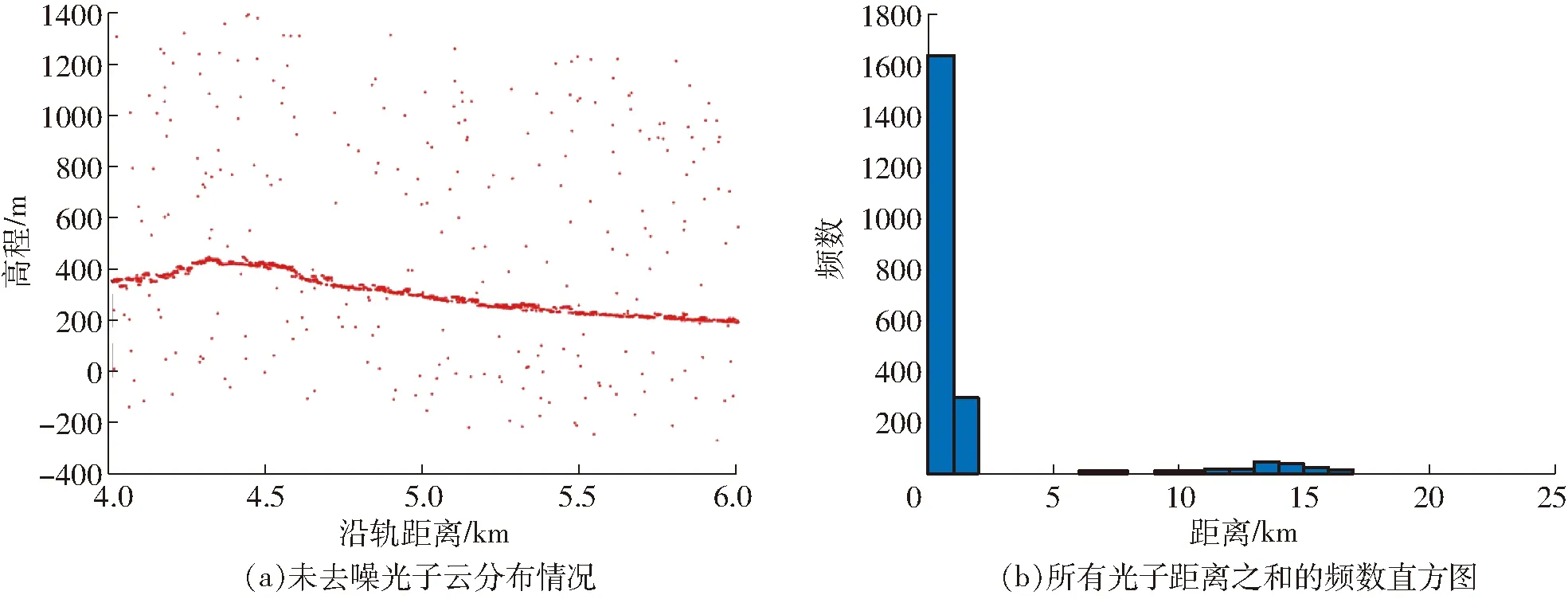
图4 局部距离统计算法Fig.4 Schematics of local distance statistical algorithm
2.1.2DBSCAN算法
DBSCAN算法即确定从核心光子出发的最大密度相连光子,这些最大集合光子对象形成“信号光子簇”,不在信号光子簇中的光子则为噪声光子。算法具体过程为:
(1)选定DBSCAN算法的2个参数,邻域(eps)和核心对象个数(Minimum number of points, MinPts)。
(2)以同一个研究区中每个光子作为聚类对象,以在给定半径eps内包含的光子数量不能少于某一阈值MinPts作为聚类基础,在此基础上对具有密度连接特性的光子对象进行聚类。
(3)遍历研究区数据集中的光子云数据,只要其邻近区域内光子数据的密度超过MinPts,则能够继续聚类,这些光子对象即为信号光子;否则,标识这些光子为噪声光子[17,19],去噪过程如图5a所示(Portland研究区)。
DBSCAN算法具有剔除噪声光子的作用。该算法设置的参数较少,仅有eps和MinPts,故合适eps和MinPts的选取十分重要,本研究参照文献[16-17]确定eps和MinPts参数。
2.1.3PSO-DBSCAN算法
PSO-DBSCAN算法核心思想为通过PSO优化DBSCAN算法的2个重要参数eps和MinPts,以适应度作为评价标准优化DBSCAN算法的去噪结果。算法流程如下:
(1)通过PSO初始化DBSCAN算法的2个重要参数eps和MinPts。

图5 PSO-DBSCAN算法过程示意图Fig.5 Process diagrams of PSO-DBSCAN algorithm
(2)对于原始数据集中光子,只要其eps邻近区域内光子数据的密度超过MinPts则能够继续聚类,这些光子对象即为信号光子;否则,标识这些光子为噪声光子(去噪过程如图5a所示)。输出初始化参数eps和MinPts的去噪结果,并计算此次eps和MinPts参数的适应度。
(3)更新参数eps和MinPts,作为后续去噪试验的输入数据[20-21]。
vid(t+1)=wvid(t)+c1r1(pid(t)-xid(t))+
c2r2(pgd(t)-xid(t))
(2)
xid(t+1)=vid(t+1)+xid(t)
(3)
式中c1、c2——学习因子
r1、r2——在[0,1]范围内的随机数
w——惯性权因子
xid(t)——第i个粒子在时间t的第d个位置
vid(t)——第i个粒子在时间t的第d个速度
pid(t)——在时间t的第i个粒子的当前最佳位置
pgd(t)——在时间t的第i个粒子的全局最佳位置
(4)通过评价不同迭代参数eps和MinPts的适应度(图5b),最后选择具有最优适应度的eps和MinPts作为最终模型的输入值,并以最优适应度的去噪结果作为PSO-DBSCAN算法的输出结果[18]。
2.2 精度验证
为评价局部距离统计算法、DBSCAN算法和PSO-DBSCAN算法的去噪精度,选择MATLAS文件中的信号分类参数(photon_type)结合人工目视检查作为去噪算法的定性标准,其中,photon_type为NASA提供的信号光子及噪声光子分类参数,但是该参数可能存在极少数光子云错分类情况,因此需结合相应的机载轨迹地标性文件(Keyhole markup language, KML)配合人工目视检查作为辅助,降低photon_type参数存在的错分情况[18]。此外,采用3个统计指标,包括召回率R(Recall)、准确率P(Precision)和综合评价指数F(F-Measure)定量评价去噪算法的性能[18,22-23]。这3个指标计算式为
(4)
(5)
(6)
式中TP——实际为信号光子且被分类为信号光子的光子云数
FP——实际为噪声光子但被分类为信号光子的光子云数
FN——实际为信号光子但被分类为噪声光子的光子云数
3 结果与分析
3.1 去噪结果
为研究不同光子云去噪算法在弱光束条件下森林区域的去噪结果,将局部距离统计算法(k为50,n为2)、DBSCAN算法(MinPts为10,eps为15)与PSO-DBSCAN算法应用于East Coast等区域的光子云去噪处理。图6、7为局部距离统计算法、DBSCAN算法和PSO-DBSCAN算法在Portland、West Coast弱光束条件下森林区域的去噪结果。表3为去噪结果评价指标汇总。
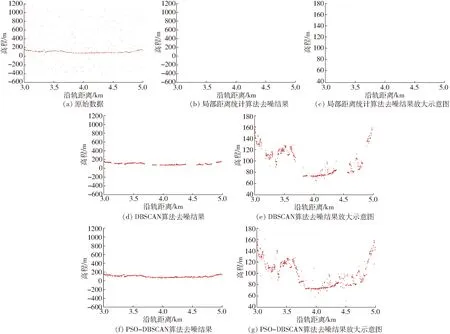
图7 West Coast研究区弱光束条件下去噪结果Fig.7 Results of noise filtering under weak beam condition in West Coast
定性分析结果如图6、 7所示,通过目视分析可知,局部距离统计算法和DBSCAN算法在部分研究区能够有效去除大部分噪声光子,但是在West Coast 研究区等区域存在信号光子被滤除情况,特别是局部距离统计算法,由于参数选定不当在West Coast 研究区甚至出现算法失效的情况,而PSO-DBSCAN算法不仅能有效去除大部分噪声光子,且能保留冠层信号光子。分析冠层光子去噪情况可知,在参数选定恰当时,局部距离统计算法和DBSCAN算法均可表现出较好的去噪效果。但是,如果参数选定不当,将严重影响该类算法的去噪精度。虽然PSO-DBSCAN算法的去噪基础为DBSCAN算法,但是仅通过人工确定参数方法并不一定能够达到较稳定的去噪效果,而PSO-DBSCAN算法通过PSO算法以寻优方式完成DBSCAN算法参数的选取,使得PSO-DBSCAN算法在不同研究区的去噪结果均能够较为清晰地描述出冠层植被的覆盖情况和冠层下地面的变化情况。
由表3可知,PSO-DBSCAN算法相对于局部距离统计算法和DBSCAN算法的去噪结果指数R、P、F的平均值有不同程度的提升。结合图6、7可知,虽然3种算法在定性角度均可以完成噪声光子的去除,但是定量结果显示PSO-DBSCAN算法的去噪结果更优。主要由于局部距离统计算法和DBSCAN算法的2个参数是决定其去噪精度的重要因素,而本研究中的局部距离统计算法和DBSCAN算法仅通过人工方式选定其重要参数,这种方式可能只是适用于某一特定环境,并不一定适用于更广泛的研究区。而具有不同激光发射强度,不同激光发射角的光子云数据具有不同的光子密度特性,并不能单纯依靠人工方式确定去噪算法的关键参数。而且,结合之前研究[11,13-14,18]证明,PSO-DBSCAN算法的去噪结果可以满足对于光子云去噪算法的要求。通过分析算法去噪特性可知,PSO-DBSCAN算法不需要根据不同光子云密度人工调节去噪算法的参数值,使得算法相对需根据光子云密度人工调节参数值的局部距离统计算法和DBSCAN算法具有更好的去噪精度。

表3 去噪结果评价指标Tab.3 Evaluation indicators of noise filtering results
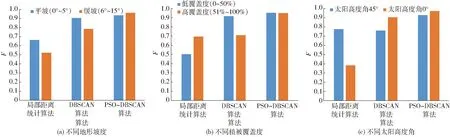
图8 不同条件下去噪结果F值统计图Fig.8 F value of noise filtering result under different characteristics
通过对定性与定量结果分析表明,由于局部距离统计算法和DBSCAN算法对于人工选定参数的依赖性,使其在弱光束条件下,森林区域的光子云去噪试验中存在将信号光子滤除的情况。而PSO-DBSCAN算法通过PSO算法进行参数的优化,使其在弱光束条件下,森林区域的光子云去噪试验中,可以去除大部分噪声光子,且能保留冠层信号光子,能为后续的光子云数据处理提供更精准的信号光子数据。
3.2 去噪结果分析
为探究不同特性对去噪算法的影响,研究地形坡度、植被覆盖度、太阳高度角对去噪算法的影响。将地形坡度分为平坡与缓坡,其变化范围分别为0°~5°与6°~15°;将植被覆盖度分为低覆盖度与高覆盖度,其变化范围分别为0~50%与51%~100%[23-25]。图8为不同条件下去噪结果F值的统计图。不同条件下去噪结果F值的差值见表4。
通过观察图8a与表4可知,在不同地形坡度下,PSO-DBSCAN算法均表现出最好的去噪效果,DBSCAN算法次之,局部距离统计算法最差。局部距离统计算法和DBSCAN算法在平坡条件下表现出更好的去噪效果,随坡度增加,局部距离统计算法和DBSCAN算法的去噪效果出现明显变化,其中局部距离统计算法的变化范围达到0.14,而PSO-DBSCAN算法的去噪结果并未随坡度变化表现出较为明显的变化。主要由于局部距离统计算法和DBSCAN算法为根据固定的圆形搜索域完成光子云去噪,而固定的圆形搜索域不一定能够充分描述斜坡条件下的光子变化情况,而PSO-DBSCAN算法通过寻优算法确定最优搜索域,进而完成光子云去噪,相对另2种算法可以在一定程度上减小受地形因素的影响。

表4 不同条件下去噪结果的F值差值Tab.4 Statistics of F value changes of noise filtering results under different characteristics
通过观察图8b与表4可知,在不同植被覆盖度下,PSO-DBSCAN算法均表现出最好的去噪效果,DBSCAN算法次之,局部距离统计算法最差。随植被覆盖度变化,局部距离统计算法与DBSCAN算法均出现变化,其中DBSCAN算法F值变化最大,达到0.21,而PSO-DBSCAN算法的并未发生变化。主要由于局部距离统计算法和DBSCAN算法为根据固定参数完成光子云去噪,在低覆盖度条件下,森林区域的光子会表现出更集中于地表的情况,而随植被覆盖度增加,光子会逐步分布在冠层位置,不会仅集中于地表。而PSO-DBSCAN算法通过寻优算法确定最优参数进而完成光子云去噪,相对另2种算法可以在一定程度上减小受植被覆盖因素的影响。
通过观察图8c与表4可知,在不同太阳高度角情况下,PSO-DBSCAN算法均表现出最好的去噪效果。随太阳高度角变化,局部距离统计算法与DBSCAN算法均出现明显变化,其中局部距离统计算法F值变化最大,达到0.39,而PSO-DBSCAN算法的并未发生明显变化。主要由于太阳光是光子云数据的一个主要噪声源,当太阳高度角为0°时,默认为没有来自于太阳的噪声光子,以大气及激光器本身噪声为主,而噪声数量是影响去噪算法的主要因素。随太阳高度角变化,以固定参数去噪的局部距离统计算法与DBSCAN算法很难得到较好的去噪精度,而PSO-DBSCAN算法通过寻优方式确定去噪参数,使其能在不同太阳高度角情况下均表现出较好的去噪效果。综合图8与表4可知,PSO-DBSCAN算法相对另外2种算法表现出更优的去噪能力,且太阳高度角相对地形坡度和植被覆盖度会对算法的去噪结果产生更大的影响。
4 结论
(1)局部距离统计算法、DBSCAN算法和PSO-DBSCAN算法均可以完成弱光束条件下森林冠层区域的光子云去噪,其中,PSO-DBSCAN算法表现出更优的去噪效果,其去噪评价指标F值的平均值为0.95。基于粒子群优化算法的PSO-DBSCAN算法在弱光束条件下森林冠层区域表现出较高精度,建议在光子云去噪试验中增加自适应方式选定参数,使算法表现出更高的去噪精度。
(2)相对地形坡度和植被覆盖度,太阳高度角会对去噪算法的去噪结果产生更大的影响。
