基于GNSS的智能水田旋耕平地机研究
2020-04-27许建康王耀羲梁友斌
周 俊 许建康 王耀羲 梁友斌
(南京农业大学工学院, 南京 210031)
0 引言
平整的水田有利于农业规模化和精细化的推进。由于水田硬底层不平,旋耕机在田间作业时将产生倾斜与振动,这将严重影响旋耕作业质量与效率,破坏水田平整,不利于水田灌溉、施肥及水稻的生长[1-2]。
激光平地机械利用激光控制技术构建一套精确调平系统,能有效提高耕整后田面的平整度[3]。20世纪80年代初,国外推出的以He-Ne激光器为光源的激光平面系统,是利用激光平地技术进行农田土地平整的重大突破。随后,美国、西班牙等国家相继推出以半导体红外激光器和半导体可见光激光器为光源的激光平面系统[4-5]。国内东北农业大学[6]、河南农业大学[7]也研究设计了应用于旱地的激光平地机。然而,旱地激光平地技术和机具不能直接在水田中应用[8]。为了满足我国水稻种植对田面平整度的要求,胡炼等[9]研发了与拖拉机后悬挂相匹配的1PJ型水田激光平地机,周浩等[10]设计了可减少拖拉机进田次数的水田打浆平地机。但激光平地机械在水平方向左右平衡控制需另加倾角传感器,其配套设备较多,且易受雨雾、大风等天气因素的干扰,不利于推广使用[11]。
全球导航卫星系统(Global navigation satellite system, GNSS)控制平地技术是目前国内外最先进的土地平整技术。相较于其他平地技术,GNSS控制平地技术适用于各种地形,具有不受阳光、风力、地势起伏等外界因素影响的优点,在美国等发达国家已经得到应用,如Trimble公司的Field Level Ⅱ、麦格集团的GCS900等[12-13]。国内,梁冉冉等[14]设计了利用双天线GNSS的精准平地系统,但未针对液压系统进行优化设计,采用普通电磁换向阀,控制精度不高,且未解决液压泵持续工作发热的问题。中国农业大学康熙等[15]、夏友祥等[16]、刘刚等[17]设计了基于GNSS的农田平整系统,并对其精度与作业效率进行优化,获得了较好的土地平整效果,但田间试验面积较小,土壤类型单一,且缺少针对水田的平整试验。目前,将GNSS技术应用于水田平整的研究较少,缺乏成熟的产品。针对上述问题,本文设计一种基于GNSS的智能水田旋耕平地机,对液压控制系统进行优化设计,并进行不同土壤质地的水田平整田间试验,以验证其实用性。
1 系统设计
1.1 系统组成与工作原理
智能水田旋耕平地机主要由悬挂架、旋耕平地机构、液压系统、自动控制系统4部分组成。如图1所示,悬挂架通过三点悬挂与拖拉机连接,其下设有滑槽,旋耕平地机构通过转轴相对滑槽转动或/和滑动连接于悬挂架下方;两组调节油缸分置于旋耕平地机构相对悬挂架转动中心的左、右侧,上端与悬挂架铰接,下端与旋耕平地机构铰接,调节油缸的伸缩变化使旋耕平地机构相对悬挂架转动或上下滑动,从而调节旋耕平地机构姿态;液压集成阀块安装于悬挂架上方,通过自动控制系统实现对调节油缸的调节作用;自动控制系统主要包括双天线RTK GNSS系统、嵌入式集成控制单元和车载显示控制终端。双天线RTK GNSS系统主要包括基站和移动接收机,移动接收机上连有移动站主、副卫星接收天线和差分信号天线;嵌入式集成控制单元与车载显示控制终端安装于拖拉机驾驶室内的集成控制台上。为了便于运输,旋耕平地机还设有折叠装置与折叠油缸,可将左右两侧的机罩与刀轴总成收起。
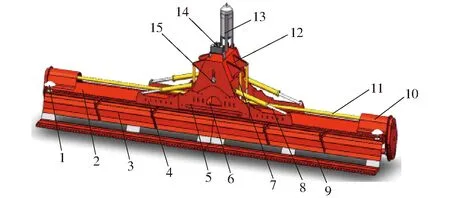
图1 整机结构简图Fig.1 Schematic of whole machine structure1.移动站卫星接收天线 2.旋耕机 3.机罩 4.侧边折叠架 5.折叠中间架 6.中央减速器 7.调节油缸 8折叠油缸 9.平地拖板 10.侧边齿轮箱 11.传动轴 12.悬挂架 13.蓄能器 14.液压集成阀块 15.旋转轴
智能水田旋耕平地机采用轮式拖拉机为动力,将水田旋耕平地机的前悬挂点与拖拉机的后悬挂装置用插销相连,通过万向节联轴器将拖拉机输出的动力传递给水田旋耕平地机。水田旋耕平地机的动力输入轴上的动力通过中央减速器和侧边齿轮箱传递到刀轴,实现刀轴的旋转运动,完成对水田的旋耕。工作前,将基站放置于田间开阔地带,移动接收机置于拖拉机驾驶室内,差分信号天线安装在拖拉机顶部,移动站主、副卫星接收天线通过磁力底座对称吸附在旋耕平地机两端的机罩上,直线距离为4 m,俯仰角精度为0.1°,定位精度可达厘米级。工作过程中,移动接收机实时接收旋耕平地机的倾角、高程等信息,并将接收到的相关信号传输至驾驶室内的车载显示控制终端,由车载显示控制终端实时显示,同时对其进行处理,形成控制信号,嵌入式集成控制单元根据调节目标值将控制信号转变为对应于三位四通电液比例换向阀的换向或开度调节的电信号,发送至液压控制系统,控制调节油缸的伸缩。当拖拉机倾斜时,左右两侧调节油缸分别伸长和缩短,使旋耕平地机构绕旋转轴转动,保持机具水平;当拖拉机上下颠簸时,两侧调节油缸同时伸长或缩短,使旋耕平地机构沿滑槽做上升或下降运动,始终保持机具在基准面上。其中车载显示控制终端与GNSS接收机由拖拉机上的12 V直流电源提供电能,系统组成与原理如图2所示。

图2 系统组成与原理图Fig.2 System compositions and principle1.拖拉机 2.车载显示控制终端 3.差分信号天线 4.移动接收机 5.液压集成阀块 6.移动站卫星接收天线 7.旋耕平地机 8.基站
1.2 液压系统设计
智能水田旋耕平地机的液压系统主要由单向阀、溢流阀、蓄能器、压力表、三位四通电液比例换向阀、液压缸等组成。液压系统原理图如图3所示,其中油箱、液压泵组成的液压油源为拖拉机自带液压油源,通过液压快速接头和油管与液压系统后半部分连接,液压泵的输出端通过管道连接溢流阀进油口和单向阀一端,单向阀的另一端与溢流阀遥控口相连,形成液压输出端,为系统提供液压油与动力。溢流阀和单向阀组成卸荷溢流阀,主要功能是自动控制泵的卸荷与加载;选用奥莱尔的NXQ型气囊式蓄能器,作为液压系统的辅助动力源,与液压泵协同工作,避免因液压泵长期持续工作造成温度过高、效率低下的情况;在卸荷溢流阀与蓄能器之间设有压力表,用于系统油压监控;本系统液压阀选用阿托斯的MA-DKZOR-TEB型三位四通电液比例换向阀,中位为O型,通过嵌入式集成控制单元发出的驱动信号控制调节油缸的伸缩;4个调节油缸分别布置在悬挂架两端,为双作用式液压缸,同侧两个调节油缸同步运动。
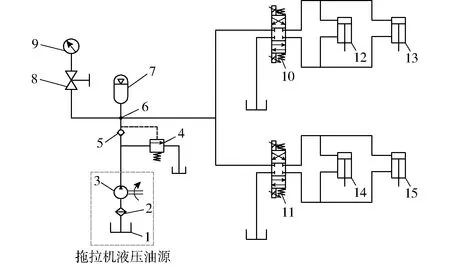
图3 液压系统原理图Fig.3 Schematic of hydraulic system1.油箱 2.过滤器 3.液压泵 4.溢流阀 5.单向阀 6.液压输出端 7.蓄能器 8.压力表开关 9.压力表 10、11.三位四通电液比例换向阀 12~15.调节油缸
液压系统工作初始,当压力表压力小于溢流阀的开启压力时,液压泵通过单向阀向液压输出端及蓄能器供油;当压力表压力大于溢流阀开启压力时,液压泵卸荷,系统压力由蓄能器保持。两组调节油缸对应的两组三位四通电液比例换向阀受到对应两路输出电压信号VA、VB控制:VA、VB均为正信号或负信号时,两组三位四通电液比例换向阀的同位阀打开,两组调节油缸同时伸长或缩短,使旋耕平地机构沿滑槽做整体上升或下降运动;VA、VB为一正一负信号时,两组三位四通电液比例换向阀的不同位阀打开,两组调节油缸分别伸长和缩短,使旋耕平地机构绕旋转轴转动;VA、VB均为零时,两组三位四通电液比例换向阀均处于中位的断电位置,两组调节油缸锁定在原有位置,旋耕平地机构位置保持不变。
1.3 控制系统设计
控制系统采用上、下位机结构,上位机主要功能包括:传感器信号的接收、倾角和高程等信息的实时显示、将处理后的控制信号发送给下位机;下位机选用的是STM32F407处理器,采用RS232串口通讯接收上位机指令,输出两路-10~10 V电压模拟量信号,控制液压系统中的电液比例换向阀。图4为车载显示控制终端实物图。

图4 车载显示控制终端Fig.4 Vehicle display control terminal
系统中控制对象具有大延迟、大惯性的特点,常规PID控制自适应能力差,很难达到理想控制的要求,而模糊控制不依赖于对象的数学模型,特别适用于非线性、时变、滞后系统的控制[18-20]。本文结合模糊控制理论与PID控制技术,采用模糊PID控制方法,实时调节PID控制参数输出适当驱动电压VA、VB,来调节电液比例换向阀的开度,形成系统自适应调整功能。控制系统框图如图5所示,图中:r(t)为给定的高程与倾角目标值;e(t)为偏差;ec(t)为偏差变化率;KP为比例调节系数;KI为积分调节系数;KD为微分调节系数;y(t)为旋耕平地机实际高程与倾角。
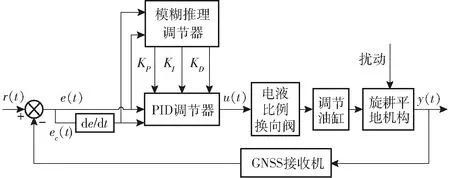
图5 控制系统框图Fig.5 Structure diagram of control system
2 试验与结果分析
2.1 试验地点
为验证智能水田旋耕平地机的可靠性和实用性,于2019年3、6、7月分别在江苏省连云港市灌云县前曹庄村、江苏省东辛农场、江苏省五图河农场进行了水田平整试验。试验机具为幅宽4.5 m的双折叠式水田旋耕平地机,牵引动力装置为大于66 kW的四轮驱动拖拉机;试验设备有车载计算机、嵌入式集成控制单元、华测导航的P3-DT高精度定位测向接收机等。图6为两次旋耕打浆作业现场图。结合水田种植的实际耕作流程,作业前,对田地放水浸泡48 h,作业时,水田旋耕打浆作业两遍。第1遍旋耕打浆作业时,自动控制系统不工作,对水田进行一次旋耕打浆,同时采用GNSS设备对地势信息进行采集,并计算出水田基准平面。第2遍旋耕打浆作业时,打开自动控制系统,系统根据当前倾角、高程信息,参考基准平面对水田进行一次平整作业。
2.2 基准面生成方法
在设计基准面时,本文采用最小二乘法对在第1遍旋耕打浆作业中GNSS设备采集到的高程与定位数据进行平面拟合,得到控制参考平面。设基准面方程为z=ax+by+c,对于采集的一系列点(xi,yi,zi),由最小二乘法公式可得
(1)
式中n——点数
由式(1)在上位机中自动求得a、b、c值,z=ax+by+c即为所拟合的基准面方程。
2.3 评价指标
平整度指农田表面起伏程度,是衡量土地平整效果的重要指标。通常用各测点到设计的基准平面垂直距离的标准差Sd来表征[21]。标准差越小,说明田面起伏越小,即农田越平整。
2.4 结果分析
试验主要测试自动控制系统性能与旋耕平地机的机械性能。其中控制系统性能通过采集到的倾角数据进行分析,机械性能通过耕整平地后的平整度进行评价。
2.4.1智能水田旋耕平地机自动调平性能
结合智能旋耕平地机在田间的实际作业情况,选取4种不同作业速度,在同一块地内,分别在400 m行程下观察旋耕平地机倾角变化情况,验证其工作性能。不同作业速度下旋耕平地机倾角随时间变化情况如图7所示。
以拖拉机前进方向作为前方,规定旋耕平地机左高右低产生的角度为负值,图7中横坐标为采样时间,采样时间间隔为0.2 s,纵坐标为旋耕平地机倾角的测量值。旋耕平地机倾角受左右地势高低影响并由控制系统控制,试验过程中倾角不断变化,且基本保持在设定的角度范围内(-0.76°~0.76°),均方根误差分别为0.63°、0.51°、0.54°、0.63°。结果表明,在不同作业速度下,自动控制系统具有较好的稳定性。

图7 不同作业速度下旋耕平地机倾角变化曲线Fig.7 Dip angle of rotary-leveling machine at different working speeds
2.4.2土地平整效果
为了更加准确分析智能旋耕平地机的土地平整效果,在江苏省连云港市进行了水田平整试验:前曹庄村试验田为普通农户种植用田,土壤类型为砂质土,前茬作物为水稻,试验地块约为0.3 hm2;东辛农场选取的试验地块前茬作物为小麦,土壤类型为粘质土,地块约为2 hm2;五图河农场选取的试验地块前茬作物为小麦,土壤类型为壤土,地块约为3.3 hm2。将3块试验田分别编号1、2、3,根据采集数据中的经纬度与高程信息,将大地坐标转换为高斯平面直角坐标,得到图8所示的平整前后水田三维地势信息图。

图8 平整前后水田三维地势信息图Fig.8 Three-dimensional topographic maps of paddy field before and after leveling
从平整前后水田三维地势信息图和地势数据可知:经过一次平整作业,农田1水田平整度由4.65 cm提高到2.83 cm,农田2平整度由4.26 cm提高到2.61 cm,农田3平整度由5.13 cm提高到3.25 cm。表明在不同大小的地块、不同前茬作物与不同土壤类型下水田表面平整度都得到了较大的改善,平整度可达到3 cm左右。
3 结论
(1)设计了一种智能水田旋耕平地机,实现了机具的水平和高度调节,该机同时兼具水田旋耕和平地两种作业功能。
(2)设计了一种蓄能器、液压泵协同工作的液压系统,使液压泵能够及时卸荷,避免由于长期工作、温度过高而造成液压泵的损坏。
(3)采用模糊PID控制方法,控制系统根据GNSS系统检测的倾角和高程信息,输出控制电压信号,驱动电液比例换向阀控制调节油缸伸缩,实现了机具的自动调节。
(4)提出了基于最小二乘法确定基准面的方法,可方便快捷地进行水田平整作业。
(5)在小麦、水稻等不同前茬作物以及砂质土、粘质土、壤土等不同土壤类型条件下进行了水田平整试验。试验结果表明,旋耕平地机适用性强,平地效果好,平整度可达到3 cm左右,满足水稻种植的农艺要求,适合推广使用。
