基于融合方法预测锂离子电池剩余寿命
2020-04-24邓安全
林 娜, 朱 武, 邓安全
(上海电力大学电子与信息工程学院,上海 200090)
锂离子电池具有能量密度高、绿色环保等优势,被广泛应用于新能源电动汽车供电。锂离子电池剩余寿命(remaining useful life, RUL)的预测属于电池管理系统的重要组成部分之一,所以精确预测锂离子电池RUL对电动汽车的安全、经济运行、发展有着重大的影响。
现阶段对电池RUL的估算方法主要分为三大类:电池物理失效模型法[1]、数据驱动法、基于融合技术的预测法[2]。电池物理失效模型法易受外界环境干扰,难以动态跟踪电池的衰退过程;数据驱动法则需要大量历史数据为依托,当训练数据量不够大或包含条件不充分时,预测精度将无法得到保证;基于融合技术法是指通过数据驱动法与模型结合,或与另外一种或几种数据驱动方法融合,取长补短,降低外界因素对预测结果的影响,同时避免使用单一算法预测时该算法自身存在的缺陷对预测精度的影响,因此具有良好的灵活性和适应性。Miao等[3]采用电池容量经验衰退模型和无迹粒子滤波算法预测锂离子电池RUL;Sbarufatti等[4]提出基于神经网络的粒子滤波算法估算RUL;Zhang等[5]在无迹粒子滤波算法的基础上,提出融合马尔科夫链蒙特卡洛方法优化粒子滤波算法的重采样过程,预测锂离子电池RUL并取得较好结果。
粒子滤波算法(particle filter, PF)适用于解决非线性非高斯的动态模型参数预测问题,所以广泛应用于目标跟踪、状态监视和故障诊断等领域[6-7]。但用于预测时存在粒子多样性丧失,以及由于粒子权重的方差随着时间递增导致粒子退化的问题[8],既增多无效运算时间又降低算法的估算精度。
目前,解决上述问题的方法主要包括两方面:选择合理的重要性函数和优化重采样过程[9]。采用无迹卡尔曼(unscented Kalman filter,UKF)算法和遗传算法(genetic algorithm, GA)改进PF算法。首先分别阐述PF、UKF、GA算法的基本原理和融合算法U-GA-PF的模型;其次,建立电池容量经验衰退模型;最后,利用NASA研究中心的序号为B5的锂离子电池的充放电数据结合算法在matlab上仿真,通过分析对比仿真得到的预测结果,来验证所提融合方法的优势。
1 算法原理
PF和UKF都属于递归贝叶斯估计方法,是回归和故障预测中非常有用的2种方法。GA算法是一种具有良好的全局寻优能力的启发式搜索算法。下面介绍3种算法的原理及融合框架。
1.1 PF算法
粒子滤波算法是采用蒙特卡洛抽样机制的递归贝叶斯滤波方法,通过粒子及其权重所构成的离散分布近似条件后验概率密度,以粒子集来表示概率,对系统的状态空间模型没有固定要求,因此非常适用于电池预测类问题的求解。而且,PF算法有良好的状态跟踪行为,能维持计算负载的易处理[10]。PF的5个核心过程如下。
(1)PF算法过程基于动态系统的状态转移方程和观测方程为
(1)
式(1)中:xk表示系统在k时刻的状态向量;yk表示系统在k时刻的观测向量;{μk-1,k∈N}为系统的过程噪声序列,{ηk,k∈N}为系统的观测噪声序列。

(3)序贯重要性采样。采用凝聚滤波算法(condensation filter),即选择真实分布的状态转移概率分布p(xk|xk-1)作为重要性概率密度,由其得到采样粒子,然后计算权重并归一化。
(2)
(3)

(4)重采样。出现只有少数粒子有较大权重,而大部分粒子权重很小的现象时,意味着粒子退化,粒子集存在很多无效粒子,影响算法精度,此时需要进行重采样增加有效粒子数。有效粒子数的计算公式为
(4)
若Neff太小,则需要对粒子集进行重采样。门限值为2/3Ns,当Neff<2/3Ns时,进行重采样。
(5)预测。状态变量xk在k时刻的后验概率密度为
(5)
式(5)中:δ(·)为狄拉克函数。根据大数定律,如果Ns足够大,则式(5)可以有效近似真实值。
1.2 UKF算法
UKF算法利用无迹变换修正非线性卡尔曼滤波,是KF算法的一种改进形式[11]。以UKF滤波得到的均值和方差构造的高斯分布是一个好的建议分布,可以很大程度地近似后验分布,提高PF算法精度,改善粒子退化程度。UKF算法主要步骤:
(1)初始化。
(6)
扩维处理后得到的初始状态变量和方差矩阵为
(7)
式(7)中:P0表示方差阵;Q表示噪声序列的方差;R表示观测噪声的方差阵。
(2)采样及权重计算。
(8)
(9)

权重W计算:
(10)
一般情况下,取α=0.01,β=0,nx+κ=3。
(3)时间更新。
(11)
(4)测量更新。
(12)
经过上述运算,可滤波得到系统状态的均值和方差,构造为建议分布作为粒子滤波的重要性分布。
1.3 GA算法
遗传算法是基于达尔文的生物进化论中的自然选择和遗传机理的最优解搜索模型,其全局寻优能力和隐并行性,有利于解决标准PF算法重采样过程的粒子多样性丧失问题。GA的主要步骤如下:
1.3.1 选择

(2)基于区间[0,Fn]内生成一个均匀分布的随机数R。
(3)将R依顺序与Fi进行大小比较,并复制第一个大于或等于R的粒子。
(4)重复(2)、(3),当粒子数等于总数Ns时结束。
1.3.2 交叉
(13)
(14)
式中:β∈[0,1];一般情况下Pc∈(0,60,0,95)。
1.3.3 变异
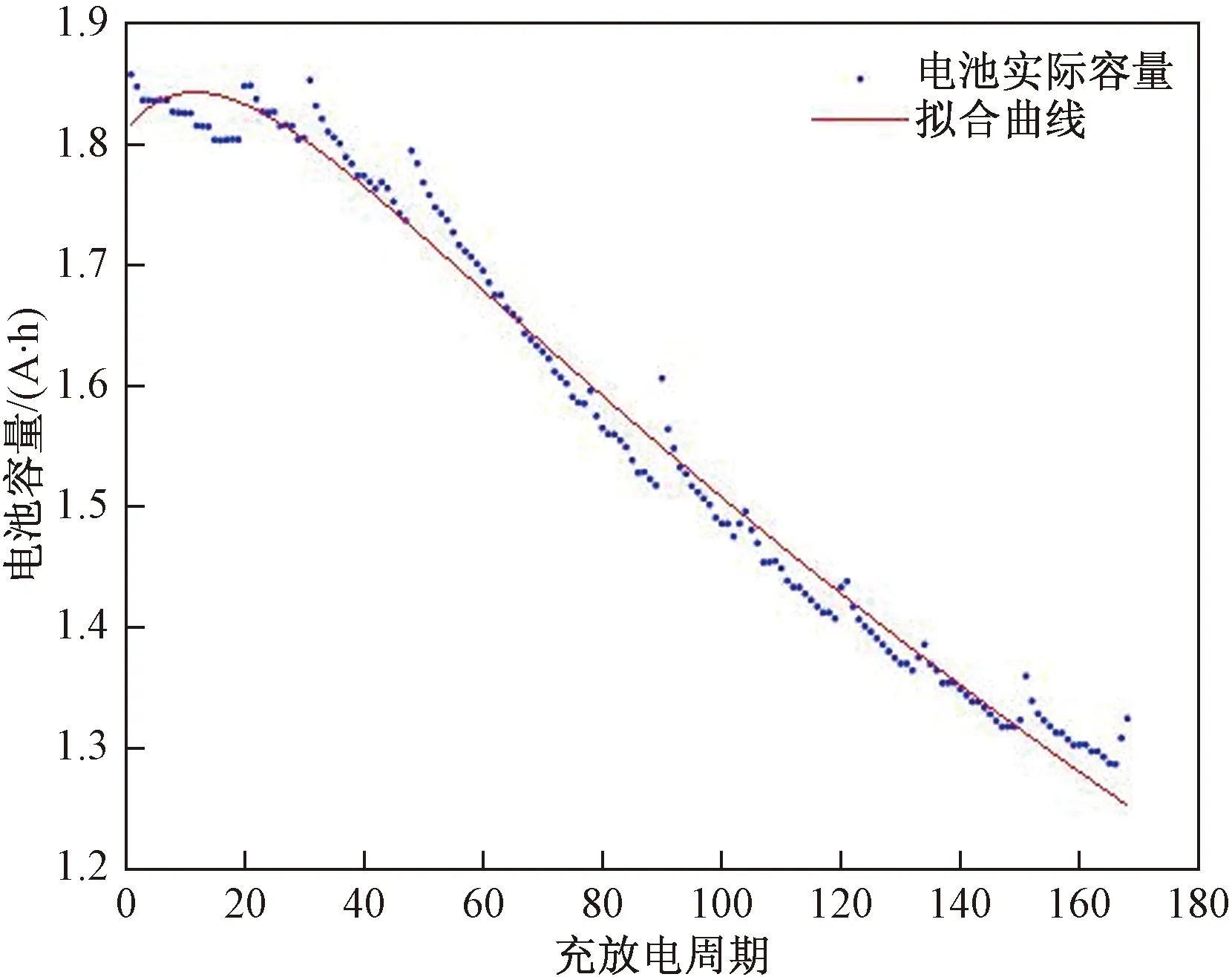
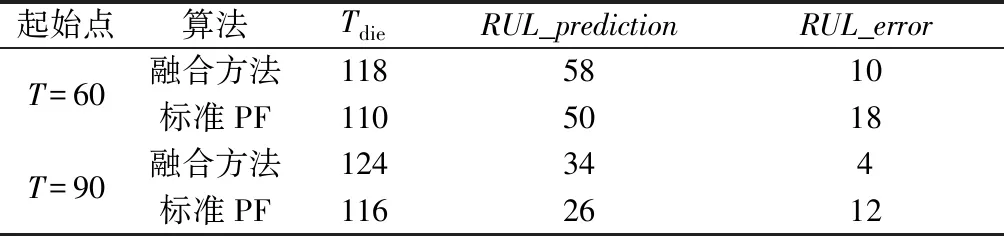
产生服从[0,1]上均匀分布的随机数θ,记变异概率为Pm,若θ (15) 一般情况下Pm∈(0,01,0,03)。 (16) 由于标准PF算法的重采样过程是复制高权重的粒子,淘汰低权重的粒子,这种简单的复制与淘汰处理致使重采样结果中包含许多重复粒子,影响预测精度并且浪费运算时间。为了克服这个问题,在PF算法的基础上,融入GA算法的生物进化思想,按照1.3节的算法重采样,代替PF的重采样过程。由于GA算法的独特寻优能力和隐并行性,可有效提高粒子的使用率,实现以尽可能少的粒子数来逼近后验概率分布的最大值,同时抑制粒子多样性的丧失,提高算法的估算精度。上述就是3种算法的融合过程。融合方法U-GA-PF预测RUL的算法流程如图1所示。具体的融合步骤将在4.1节结合实验过程给出。 图1 U-GA-PF算法流程Fig.1 Flow chart of U-GA-PF 选用NASA PCoE实验室的电池数据集中序号为B5的电池数据来验证上述融合算法的有效性及优越性。B5电池为氧化钴锂离子电池,额定容量为2 A·h。其充、放电实验环境温度为24 ℃,具体实验过程和条件的描述如下: (1)以1.5 A电流恒流充电,至电池电压达到4.2 V,转恒压充电,至充电电流降至20 mA时停止。 (2)以2 A电流恒流放电,至电压下降至2.7 V。 (3)以电池容量作为退化因子,当电池容量的衰退量达到额定容量的30%,即电池容量为1.4 A·h时,结束实验。 采用文献[12]提出的经验指数模型式(17)作为锂离子电池的容量衰退模型。 Ck=aexp(bk)+cexp(dk) (17) 式(17)中:Ck表示在第k循环周期时的锂离子电池容量;a、b、c、d表示模型参数。结合MATLAB中的曲线拟合工具箱,用最小二乘法拟合获得模型参数的近似值,从而得到近似的指数衰退模型。拟合曲线如图2所示,拟合得到的模型参数如表1所示。 由图2可知,容量拟合曲线很贴近真实的容量数据,拟合结果的均方根误差为0.022 5,可知所选的经验模型与真实数据匹配度好,可良好地描述锂离子电池容量的衰退趋势。 图2 B5电池拟合曲线Fig.2 Fitting curve of battery B5 表1 B5电池的模型参数Table 1 Model parameters of B5 battery 根据电池容量的经验衰退模型式(17),锂离子电池系统的状态转移方程和观测方程可改写为式(18)、式(19)。 xk=[ak;bk;ck;dk] (18) Ck=akexp(bkk)+ckexp(dkk)+ νk,νk~N(0,θν) (19) 式中:Ck表示在循环周期k时的系统的观测容量;N(0,θ)表示均值为0,标准差为θ的高斯噪声。电池失效阈值为0.7C,因此,在k周期RUL的预测分布为 (20) (21) 电池剩余寿命(RUL)表示距离电池失效前的使用时间,定义式如下: RUL=Tdie-Tnow (22) 式(22)中:Tdie表示电池失效时对应的循环周期;Tnow表示当前的循环周期。 为了实现预测,首先定义T为预测起始周期点,CP(k)为容量估算值,V为电池寿命结束门限,C_true为电池实际容量,将C_true设置为输入参数,同时将第k步融合算法得到的CP(k)及RUL的概率密度函数(probability density function, PDF)设置为输出参数。然后,将表1中的参数作为模型的初始参数,并将T时刻之前的实际容量C_true用于训练衰退模型,训练得到优化的衰退模型参数。最后,从T时刻之后用融合算法跟踪并估算容量,并判断每一步输出的CP(k)是否达到门限值V,达到则停止迭代,并计算对应的RUL及其PDF分布。 融合框架的具体步骤如下: (1)初始化,k=0,产生粒子;令k=1。 (2)重要性采样:根据1.2节UKF滤波构造建议分布,从其中采样,然后更新权重并归一化。 (3)重采样:计算有效粒子数,根据式(4)计算有效粒子数,若小于有效粒子数门限值,则根据1.3节GA算法进行重采样。 (5)k=k+1,重复(2)~(5)步,输出每次得到的容量估计值CP(k)。 (6)若CP(k)达到门限值1.4 A·h,则计算对应的RUL预测值和PDF,并输出结果。 将融合方法和标准PF算法分别与NASA PCoE的电池数据集结合,进行RUL预测,并对两种方法的结果进行比较。以B5电池数据进行实验,参数设置为:起始预测点分别为T=60、T=90,电池寿命结束的容量阈值为V=1.4 A·h,粒子数Ns=500,系统观测噪声和过程噪声的协方差均为0.000 1。 其中预测起始点为T=90时两种方法预测RUL的结果对比如图3所示。T=60及T=90的具体结果参数的对比如表2所示。 表2中,RUL_prediction表示RUL的预测值,RUL_error表示RUL预测结果的绝对误差,其定义式为 RUL_error=|RUL_prediction-RUL_true| (23) 式(23)中,RUL_true表示实际的RUL。 已知B5电池实际是在第128个循环周期时失效,由图3和表2可得,当预测起始点设置为T=90时,RUL_true=128-T=38个周期。融合方法得到的Tdie为第124个周期,RUL_prediction=124-T=34个周期,所以RUL_error=|34-38|=4个周期。标准PF算法预测的Tdie是第116周期,RUL_prediction=116-T=26个周期,RUL_error=|26-38|=12个周期。 图3 标准PF和融合算法的锂离子电池RUL 估算结果(T=90)Fig.3 RUL prediction results with fusion algorithm and standard PF algorithm (T=90) 表2 两种方法的RUL预测结果Table 2 RUL prediction results of two methods 当起始预测点设置为T=60时,融合方法得到的Tdie为第118个周期,RUL_prediction=118-T=58个周期,RUL_true=128-T=68个周期,所以RUL_error=|58-68|=10个周期。标准PF算法预测的Tdie是第110周期,RUL_prediction=110-T=50个周期,RUL_error=|50-68|=18个周期。 为了更好地对比实验结果的预测精度,通过计算两种方法的预测结果的均方根误差(root mean square error, RMSE)和平均相对误差(mean absolute error, MAE)来进行评价,RMSE和MAE的定义式为 (24) (25) 表3 两种方法的RUL预测结果误差Table 3 RUL prediction results error of two methods 由表3可得,融合方法的两项误差MAE、RMSE均比标准PF算法的低,因此总体上,融合方法的预测性能略高于标准PF算法。 对锂离子电池RUL的精确预测既可以提高系统的可靠性,也能有效预防由于系统故障引起的事故。为了提高锂离子电池RUL估计的精确度,采用双指数容量经验衰退模型,基于NASA PCoE实验室的第5号电池数据,利用UKF算法和GA算法融入标准PF算法的融合方法估算电池的RUL,并与标准PF算法的预测结果作了对比。验证结果表明,所提的融合算法可提高估计电池RUL的精度,降低误差,且具有较好的适用性。2 3种方法的融合

3 锂离子电池经验衰退模型


4 实验与分析
4.1 实验方法
4.2 融合方法与标准PF算法实验结果的比较



5 结论
