基于PLC的模块化可重构机器人的关节模块控制系统设计
2020-04-23阜阳职业技术学院工程科技学院安徽阜阳236031
李 梅(阜阳职业技术学院工程科技学院,安徽阜阳 236031)
随着《中国制造2025》的发展,高端制造业转型升级已经取得了巨大的进步,而众所周知高端制造业的发展及转型离不开工业机器人。目前,根据实际生产的需要,选择、制造、使用合适的工业机器人完成指定任务已经变为现实。但是事实上,实际生产作业中有许多的不确定性因素,这些不确定的因素使得无法确定具体的任务内容,当然也就无法根据任务去定制机器人。面对这种情况,研发一种可以随着不同外界因素的变化而进行自身变化的机器人系统变得尤为重要。固定式的机器人肯定无法满足要求,因此,可重构模块机器人便应运而生[1]。
模块化可重构机器人可以根据不同实际生产的要求,重构成不同的构型,满足不同的生产需要,所以这种机器人的环境适应性会更强。简单来说,这种机器人是由不同的模块组成,这些模块使不同尺寸大小的,具有某些特定功能的关节等,使用时可以用不同的方法进行拆卸、组装完成[2]。本文所述的系统主要是由PLC控制单元、模块控制单元、调节单元、显示单元和监控单元构成。该系统能够通过设置调节单元和模块控制单元对机器人各个驱动设备设置的参数进行修改,从而在机器人的模块化部件转变使用状态或者转变使用职能时对部件进行调节控制,有效的方便机器人的模块化部件进行多样组合使用。该系统总体结构如图1所示。
1 系统各单元功能介绍
1.1 PLC控制单元
PLC控制单元和系统中其他的所有单元相连,占据着核心地位,其主要功能是:它与调节单元相连,能够对模块控制单元进行参数设置与更改;它与模块控制单元相连,能够实现实时数据的传输与交换;它与显示单元相连,能够对机器人模块化部件的信息和执行操作情况进行实时显示,方便现场工作人员进行查看;它与监控单元相连,能够完成对机器人模块化部件的位置进行实时监控。

图1 系统的总体结构图
1.2 模块控制单元
模块控制单元的主要功能是:通过模块控制单元中的存储器、单片机、控制器等对机器人的模块化部件的数据进行存储、修改和单个操作控制。
1.3 调节单元
调节单元的主要功能是:通过与PLC单元进行连接对PLC进行编程、调试、修改等,借助其固有的输入设备通过PLC和对应的通讯模块与控制器对机器人模块化部件的数据进行修改和设置。
1.4 显示单元
显示单元的主要功能是对机器人模块化部件的信息和执行操作情况进行显示。
1.5 监控单元
监控单元的主要功能是对机器人模块化部件的位置进行定位并对其位置情况和具体使用情况进行实时监控。
综上所述,在这五个单元的共同作用下,系统能够对驱动设备设置的参数进行更改,便于机器人的模块化部件进行构型变化,这样工业机器人完成的功能任务就可以进行变化,提高了整个系统的适用性[3]。系统的总体框架图如图2所示:

图2 系统的总体框架图
2 系统各单元设计
基于PLC的模块化可重构机器人的关节模块控制系统的显示单元使用的是显示器,监控单元使用的是GPS定位器和摄像头。目前市场上普通的显示器、GPS定位器和摄像头都能满足要求,其结构设计和控制过程均较为简单,这里不再详述。下面主要介绍PLC控制单元、模块控制单元及调节单元的设计。
2.1 PLC控制单元的设计
PLC控制单元是整个系统的核心,肩负着与其他所有单元进行通讯、数据交换的使命,因为工业机器人本身的控制较为复杂,所以PLC选择的是由德国西门子公司生产、能够搭配不同档次PLC、具有工业以太网连接方式、可搭配多个不同扩展模块的西门子S7-300的PLC。S7-300具有标准型和紧凑型两种结构,在工业控制领域中,使用广泛。S7-300 PLC硬件结构[3]如图3。
2.2 模块控制单元的设计
为了对模块化机器人能够更好地进行操作,模块控制单元设计了三种同样类型的控制单元,每个控制单元分别由存储器、控制器、单片机和无线通讯模块组成。这三个控制单元既是相互独立的,又能够根据不同的机器人构型的要求进行相应的设置,以满足不同场合的机器人的使用。具体是通过存储器1、存储器2和存储器3对机器人的模块化部件的信息进行存储,单片机1、单片机2、单片机3对机器人模块化部件的数据进行单独数据处理,控制器对机器人的模块化部件进行单个控制,然后通过无线通讯模块1、2、3与PLC之间进行数据交换,最终通过调节单元的工业控制计算机进行参数的设置与变换。该单元的结构图如图4所示。
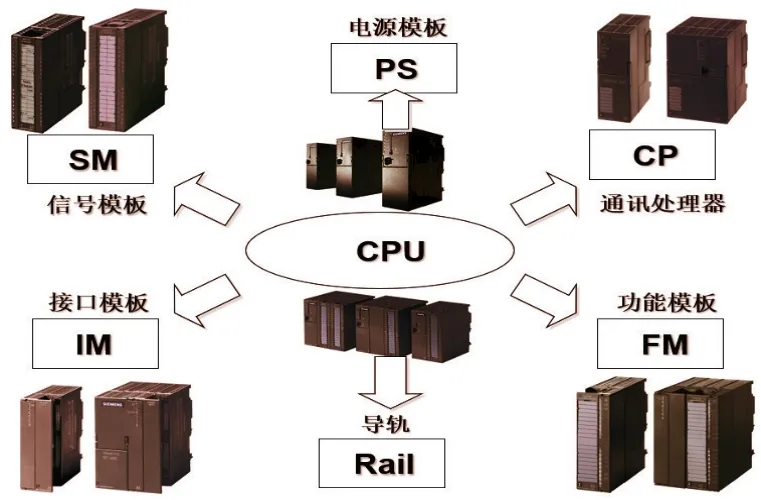
图3 S7-300 PLC的硬件结构组成
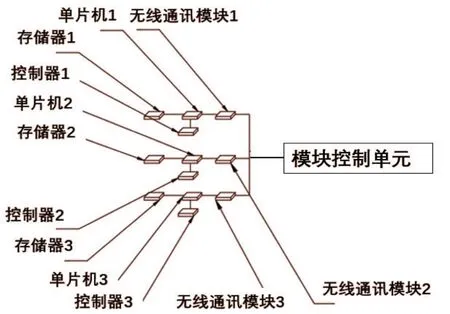
图4 模块控制单元的结构图
2.3 调节单元的设计
调节单元主要是由一台具有计算机主板、CPU、硬盘、内存、外设及接口,并有操作系统、控制网络和协议的工业控制计算机构成的[4]。当然,这台工业控制计算机也具有计算能力和友好的人机界面。系统在PLC控制单元的协调下,能够通过调节单元工业控制计算机向单片机1、单片机2和单片机3发送指令,从而对控制器1、控制器2和控制器3的驱动设备设置的参数进行更改。
3 结束语
基于PLC的模块化可重构机器人的关节模块控制系统在PLC控制单元的协调下,能够通过调节单元工业控制计算机向单片机1、单片机2和单片机3发送指令,从而对控制器1、控制器2和控制器3的驱动设备设置的参数进行更改,进而对机器人的模块化部件在转变使用状态或者转变使用职能时对部件进行调节控制,有效地方便机器人的模块化部件进行多样组合使用,可以进行独立操作或者整体连接操作,提升组合式使用的便捷性。另外,系统可以通过监控单元摄像头对机器人的模块化部件在使用时的具体使用状态、部件的安装位置和放置位置进行监控,通过显示单元显示器对机器人的模块化部件的信息和执行操作情况进行显示,有效地提升了对机器人模块化部件在重构后转变使用状态和使用职能进行监控,并对使用后产生的效果进行有效监测[5]。也就是说在各个单元的共同作用下,系统能够对驱动设备设置的参数进行更改,便于机器人的模块化部件进行构型变化,这样工业机器人完成的功能任务就可以进行变化,从而提高了整个系统的适用性。