油浸式变压器微型机器鱼姿态定位
2020-04-22刘力卿李隆基季洪鑫
王 伟, 刘力卿, 何 金, 李隆基, 季洪鑫
(1.国网天津市电力公司电力科学研究院,天津 300384; 2.清华大学航天航空学院,北京 100084)
电力变压器是电力系统中最关键的设备之一,目前人们对电气设备进行局部放电在线监测,不能很好地将局放信号的各种特征量的变化与所发生的绝缘故障的严重程度结合起来。难以通过局部放电对变压器内部的放电类型、放电位置、放电严重程度进行可靠的判断[1-5]。而由于微型机器鱼具有体积小、有能源、能运动、能感知、能定位、能通讯、少维护等优点,通过将微型机器鱼置于变压器内部直接对绕组、绝缘纸板表面的碳痕的有无、长短进行观察,可较直观地确定绝缘故障位置以及绝缘劣化程度。
变压器微型机器鱼需要在大型变压器油中进行巡视,大型变压器体积巨大且内部结构复杂。变压器微型机器鱼在检测过程中,如何实现微型机器鱼的位姿准确定位是机器鱼任务完成的关键。
由于变压器由金属外壳完全密封,难以采用常规的传感器(激光雷达、视觉相机、全球定位系统(GPS)等)对微型机器鱼的位姿进行定位,因此变压器油中微型机器鱼的定位可参考水下航行器的一些定位方法。由于电磁波在水中传播衰减很大,很多情况下高精度的GPS信号无法直接使用,因此非卫星水下导航定位技术成为多年来的研究热点,目前常用的定位方法有:惯性导航、地形匹配、地球物理导航、声学导航等多种方式。
(1)惯性导航。惯性导航技术是一种自主导航系统,可以在不与外界通信的情况下连续执行三维空间定位。惯性系统的缺点是存在随时间积累的位置误差,长时间航行需要参考信息的矫正[6-7]。
(2)地形匹配。地形匹配导航的原理是首先通过地形探测设备获取航行器周围的地形特性信息,然后将该特征信息匹配计算机里已建的地形图,进而确定航行器的位置信息。与惯性导航系统一样,具有自主性强的优点,基于已知水下地形信息可以获得不亚于GPS的导航精度。水下地形匹配导航的缺点在于必须事先勘测活动海域水下地形并记录下来,定位精度受限于先验地形图的精度[8-11]。
(3)重力场导航。重力场导航是一种新型无源导航技术,其前提是有相当精度的重力分布图,其原理与地磁导航原理一样,都是利用实测数据对比先验基准数据的导航方法。现有海洋重力异常场分辨率已经达到2′×2′以内,这给高精度重力匹配导航提供了可能性[12-13]。
(4)声学导航。在水下,声波信号相比电磁信号能够传播更远的距离,因此声学导航也是水下导航的重要手段。利用声学导航首先要在水下铺设应答器基阵,根据航行体与应答器之间声信号传播确定航行器相对应答的位置。声学导航系统具有高精度且无累积误差,其缺点是需提前铺设应答基阵,设备成本较高,维护困难[14-15]。
总的来看,单一水下导航技术各有优缺点,由于变压器由金属外壳完全密封,变压器内部无光照,且地球重力场难以进入,因此难以采用常规的传感器(激光雷达、视觉相机、GPS、重力仪等)对微型机器鱼的位姿进行定位,且由于变压器微型机器鱼发出的超声信号会经过变压器油和外壳进行传播,传播路径较复杂,对超声定位传感器的布置造成较大的困扰。针对该问题,提出基于声-电位姿定位和惯性导航相结合的联合位姿检测方法,并构建变压器内部智能巡检机器鱼的姿态计算模型;通过分析超声信号在变压器内部及外壳上的传播特性提出声-电联合定位装置安装方式,基于内嵌式的安装方式设计声-电联合定位传感器,并对变压器机器鱼姿态定位进行仿真测试。
1 变压器微型机器鱼姿态定位方法
变压器微型机器鱼自身位姿的准确定位是实现微型机器鱼对变压器内部故障位置精确检测的基础。针对该问题,采用超声定位和惯性导航相结合的思路对变压器微型机器鱼进行位姿定位,其技术路线如图1所示。
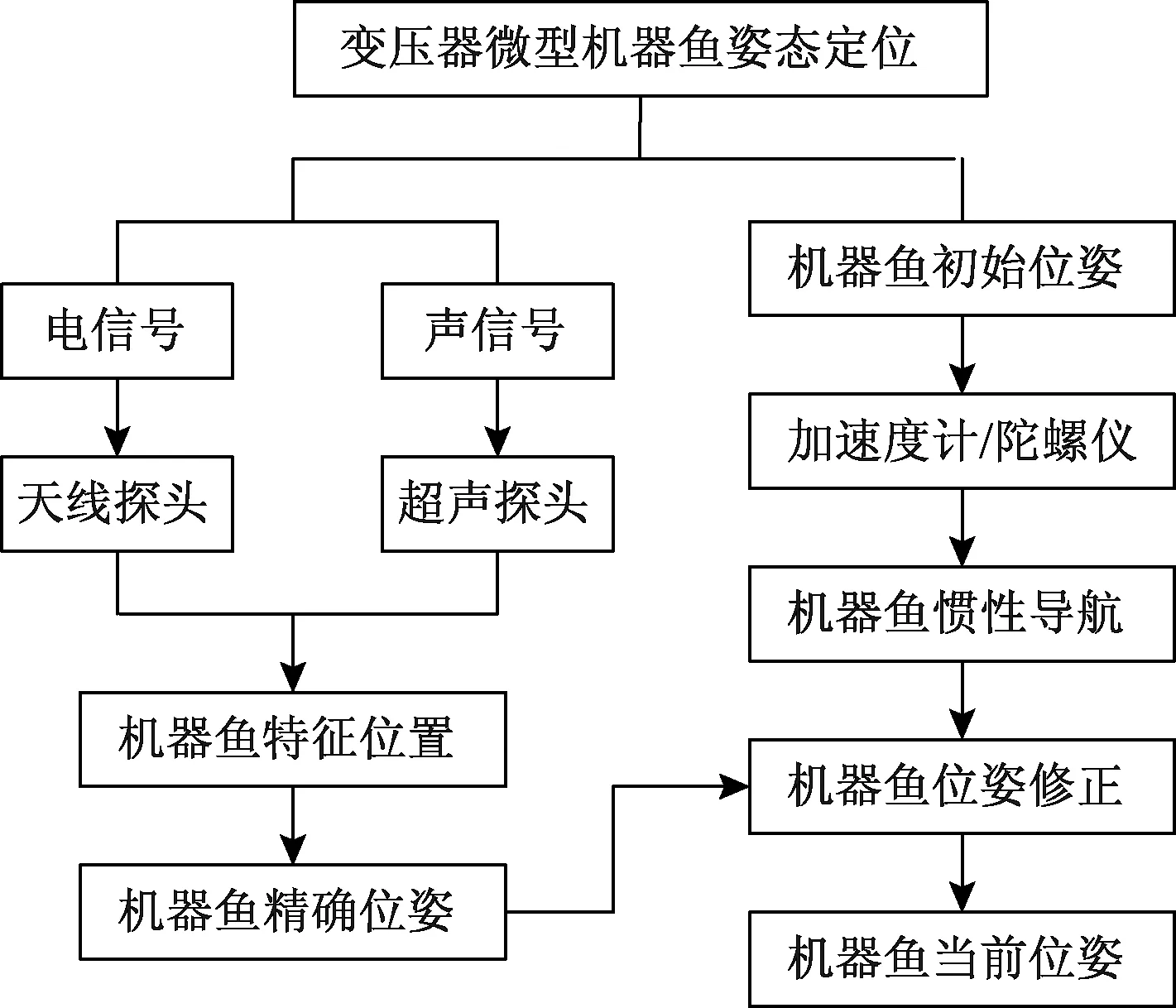
图1 变压器微型机器鱼位姿定位技术路线图
图1展示的微型机器鱼位姿定位思路如下:微型机器鱼放入变压器注油通道内,微型机器鱼的初始位姿已知,微型机器鱼在移动过程中通过自身安装的加速度计和陀螺仪可获取自身的加速度和角加速度,作二次积分可得到微型机器鱼的位置和姿态,实现微型机器鱼的惯性导航,这种导航不需要与外部设备进行信息交流就能实现微型机器鱼的三维定位,属于无源导航,但这种导航方式存在一个较大的缺点,那就是存在时间累积误差,随着微型机器鱼游动时间的增加,导致微型机器鱼的位姿偏差增大,因此微型机器鱼需要隔一段时间对其位姿进行修正。为此微型机器鱼定期发出超声信号和电磁波信号,当微型机器鱼移动至安装在变压器上的超声阵列附近时,超声阵列会检测到微型机器鱼发出的超声信号,天线探头会检测到微型机器鱼发出的电磁波信号,通过电信号与超声波联合检测,可定位出微型机器鱼的精确位置,用该精确位置对微型机器鱼惯性导航的位姿进行修正,保证了当前获得的微型机器鱼的位姿始终在规定的误差范围内。
1.1 变压器内超声波传播特性
采用超声波对变压器内部的机器鱼的位姿进行定位时,超声波传感器的阵列有两种安装方式,一种是安装于变压器器壁上,如图2所示;另一种是安装在变压器内部的油里。
图3展示的是变压器内超声波传播路径模型,图中S为超声信号源位置,A为超声信号源距离变压器器壁最近位置,B为变压器器壁上位置,C为变压器器壁上位置,D为变压器器壁上超声传感器安装位置,Φ为路径SD与路径SA间的夹角。变压器微型机器鱼发出的超声信号,到达位于变压器器壁的超声波传感器有2条基本路径:一条为直接路径SD(超声信号源S直线到达超声波传感器安装位置D的路径);另一条是超声信号先在变压器油中传播,到达器壁后,再沿着器壁传播至超声阵列的复合路径如SBD、SCD等,如图3所示。而变压器微型机器鱼发出的超声信号到达位于变压器内部油里的超声波传感器有一条基本路径,即直接路径SD。
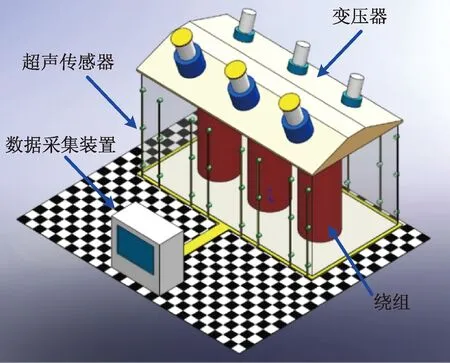
图2 变压器微型机器鱼超声阵列示意图(方式一)
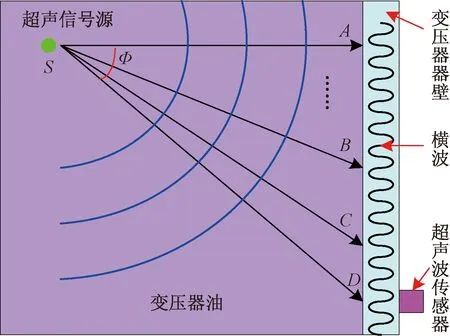
图3 变压器内超声波传播路径模型
变压器微型机器鱼发出的超声波以纵波的形式在变压器油中传播,当传播至变压器的器壁时,则不仅存在传播方向平行于质点振动方向的纵波,还存在传播方向垂直于质点振动方向的横波。超声信号在变压器油和器壁的分界面上会发生反射和折射,它们都遵循斯奈尔法则,即
(1)
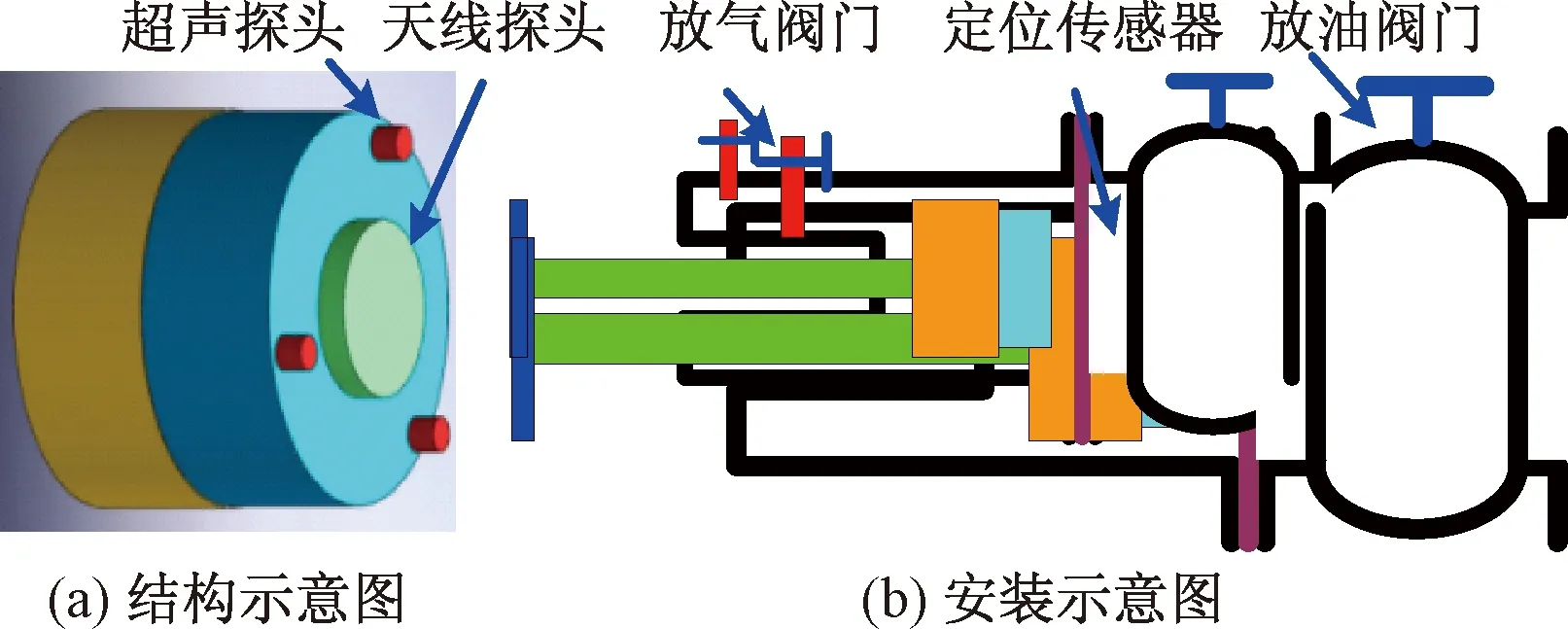
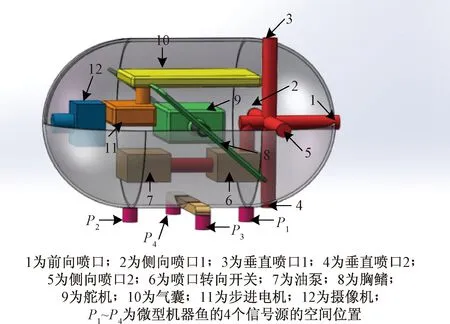
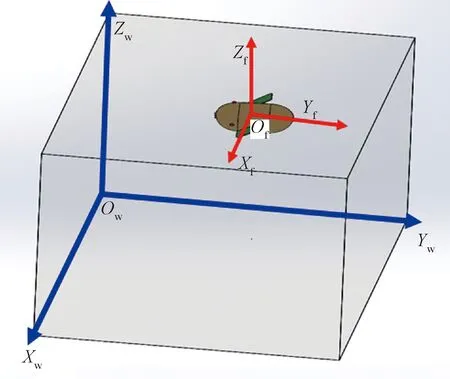
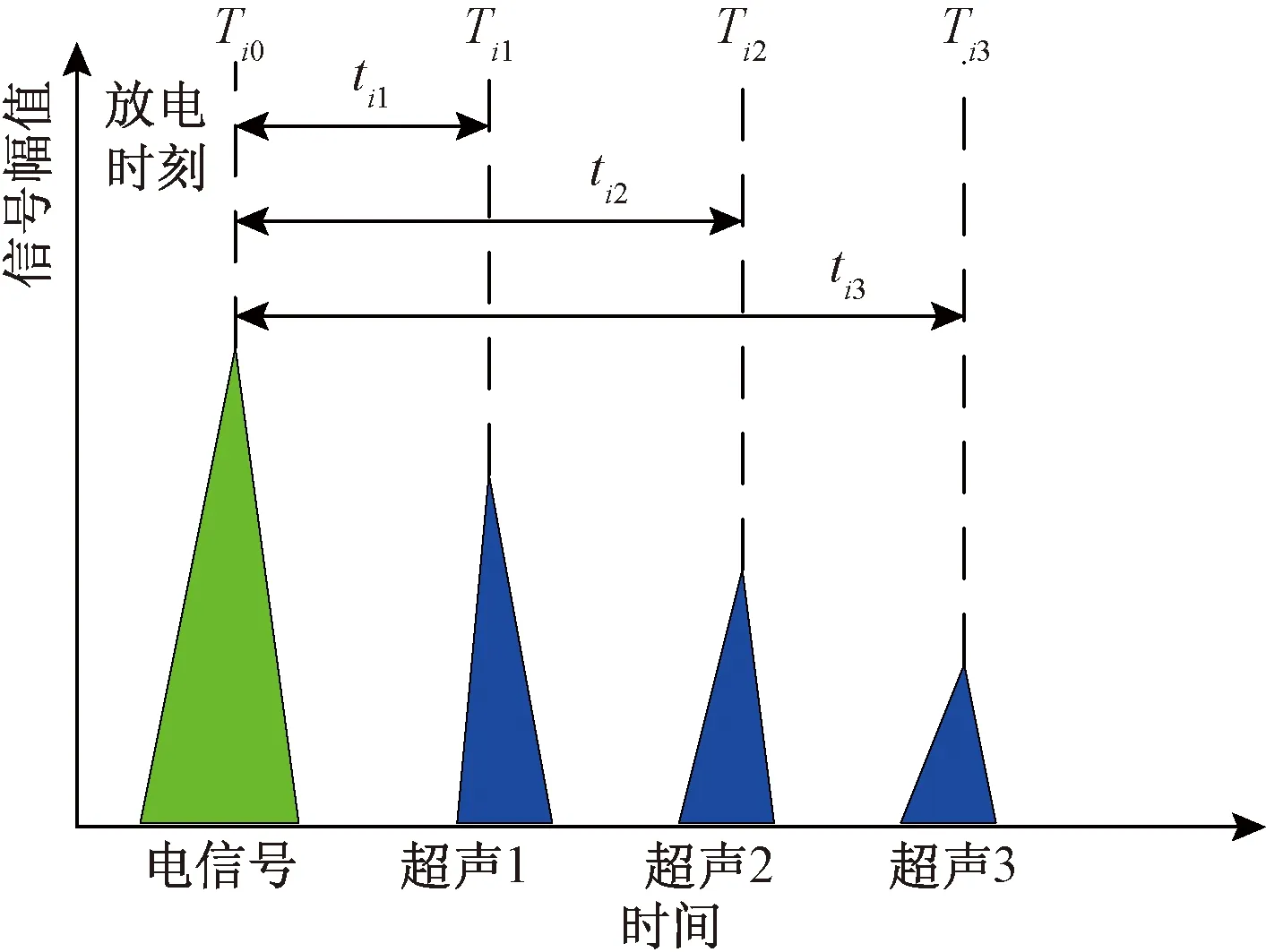
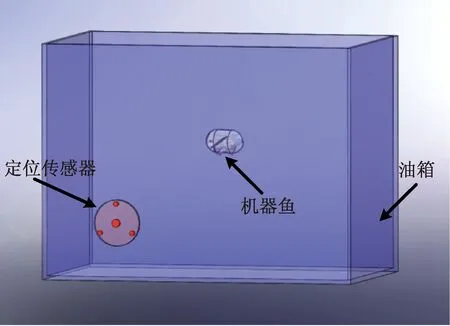
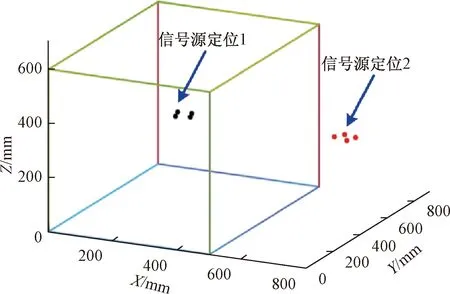
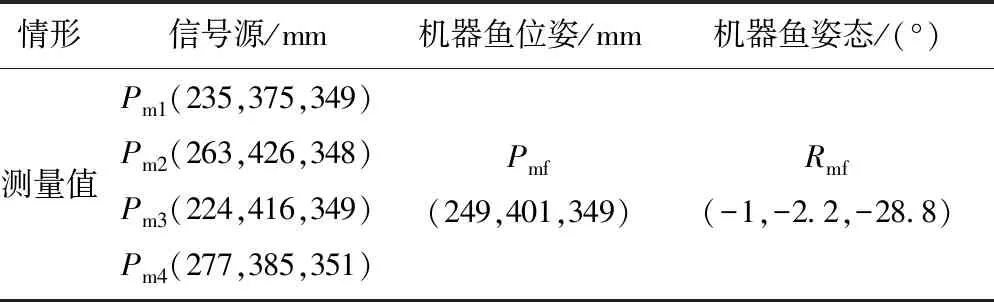
式(1)中:θ1与v1分别为入射波形的角度与速度;θ2与v2分别为折射波形的角度与速度。当v1 变压器微型机器鱼产生的超声信号,传至器壁上的超声传感器过程中,只有一条直接传播路径,而复合传播的路径却有许多条。由于与油中的声速相比,器壁钢板中的声速要高许多,因此直接传播路径不一定是最快的路径。由图3中所示的传播路径可知,声波传至器壁上的超声传感装置所用时间为 (2) 式(2)中:(X,Y)为超声传感器安装的位置坐标;(x,Y)为超声信号源S(0, 0)发出的超声信号由变压器油传播进入变压器器壁的位置;vtank是变压器器壁中横波或纵波的速度。令dt/dx=0,可求出最短传播时间的路径。此时入射θ=θc,且θc=arcsin(voil/vtank)。故最短的传播时间为 (3) 式(3)中:仅当Φ>θc时成立,若Φ<θc,直接路径(即SD)为传播时间最短的路径,其中Φ为图3所示路径SD与路径SA间的夹角。 器壁上安装的超声阵列定位所用的信号是直达超声信号(超声信号从直接路径传播过来的),且声-电联合定位中至少3个超声探头接收到直达超声波,为此至少三个超声波传感器位于临界角θc范围内。设定微型机器鱼在移动过程中距离变压器器壁 最近距离不小于10 cm,且3个超声波传感器均在临界角范围内,此时超声波之间布置的距离应小于2.5 cm。因此为有效检测到直达超声信号实现微型机器鱼的准确定位,需要在变压器器壁较大区域内布置超声波阵列,且超声波传感器间的距离小于2.5 cm,这会需要大量的传感器,成本较高且较麻烦。为此采用第二种传感器布置方式,即传感器安装在变压器内部的油里(图4)。 图4 变压器微型机器鱼超声阵列示意图(方式二) 大型油浸式变压器器身上有注油孔等安装孔,考虑到其安装尺寸和安装位置,设计了一款电-声联合定位传感器,如图5(a)所示,该复合传感器中的超声阵列由三个压电陶瓷组成,该压电陶瓷压电常数为5 C/N,介电损失为0.9%,中心频率为500 kHz,呈三角形排列。该复合传感器中间位置是用来测电磁波信号的天线探头。 微型机器鱼定位传感器采用注油孔安装形式,通过注油孔将传感器伸入变压器油中,其安装示意图如图5(b)所示。首先将定位传感器安装在放油阀法兰盘处,然后将放气阀门打开,再将放油阀门拧开,当放气阀排气至放气阀门处出现少许油时,说明定位装置与放油阀间气体排空,此时放气阀关闭,并将定位传感器探头被推至比油箱平面突出约5 cm位置处,此时定位装置安装结束。 图5 微型机器鱼定位传感器结构示意图及安装示意图 变压器微型机器鱼内部结构如图6所示,其中变压器微型机器鱼的前端安装有变压器的检测探头(如摄像头、测距超声传感器阵列等)、变压器微型机器鱼的中间上部安装有气囊,为非密封部分,可为微型机器鱼提供向上的浮力。中间的下部为耐压舱段,可以装载电池、控制系统、舵机、步进电机、油泵等设备[16]。在微型机器鱼体两侧安装有一对鱼鳍,通过鱼鳍角度的调整,实现机器鱼的滑翔。 图6 变压器微型机器鱼示意图 在变压器微型机器鱼底部的四周各安装有微型气体放电管。当微型气体放电管内发生放电过程时,会伴随有崩裂状的声发射,进而发出超声波,此时会被安装在变压器注油孔中的定位装置接收到。 为便于描述变压器微型机器鱼的位姿,建立如图7所示的空间直角坐标系,各坐标系的定义如下: 图7 变压器空间直角坐标系 (1)变压器世界坐标系OwXwYwZw:坐标系原点Ow以变压器一个角的顶点为原点,OwXw轴位于水平面内,方向沿着变压器的宽边且向外,OwYw轴位于水平面内,方向沿着变压器的长边且向右,OwZw轴根据坐标系右手定则确定,此坐标系用来描述变压器的空间环境。 (2)微型机器鱼随体坐标系OfXfYfZf:坐标系的原点Of位于鱼体底部的中央,OfYf轴与鱼体水平中轴线平行,方向指向其游动的方向,OfZf轴与鱼体竖直轴线重合,方向向上,OfXf轴根据坐标系右手定则确定,此坐标系用来描述微型机器鱼相对于变压器坐标系的运动。 在这方面,《周易》的思想也是很明白的。《易经·谦卦》有一段是这样说的:“劳谦,君子有终,吉。子曰:劳而不伐,有功而不德,厚之至也。语以其功下人者也。德言盛,礼言恭;谦也者,致恭以存其位者也。”按照《周易》的思想,谦逊的人最大的优势在能“存其位”,换句话说,能保全自己的饭碗,保全自己的声名,关键时刻能保全自己的生命。《周易》中对谦卦的整体评价是:“谦,亨,君子有终。”因为能“存其位”,自然可以善始善终,所以谦卦的彖传中言:“天道亏盈而益谦。地道变盈而流谦。鬼神害盈而福谦。人道恶盈而好谦。” 变压器微型机器鱼的4个信号发射源以P1(xs1,ys1,zs1)、P2(xs2,ys2,zs2)、P3(xs3,ys3,zs3)、P4(xs4,ys4,zs4)表示,各个定位传感器分别以L1{C11(xd11,yd11,zd11),C12(xd12,yd12,zd12),C13(xd13,yd13,zd13),U1(xe1,ye1,ze1)}、L2{C21(xd21,yd21,zd21),C22(xd22,yd22,zd22),C23(xd23,yd23,zd23),U2(xe2,ye2,ze2)}……表示,其中Ci1、Ci2、Ci3和Ui表示第i个定位传感器上的三个压电探头和天线探头。 当变压器微型机器鱼移动到第i个定位传感器附近时,第i个定位传感器上的三个压电探头和一个天线探头分别检测到微型机器鱼第Pj(xsj,ysj,zsj)个信号源发出的超声信号和电信号。由于天线探头测得的电信号,其传播速度远大于声信号,因此电信号的传播时间可被忽略,认为超声信号与电信号的时差即为声信号从微型机器鱼信号源传播到压电探头的时间。Ui为天线探头测得的电信号的时刻为Ti0,第Cik个压电探头测得的声信号时刻为Tik,以Ui探头为参考传感器,用tik=Tik-Ti0表示Cik压电探头与Ui天线探头接收到信号的时刻差,如图8所示。 图8 超声信号传播时间 参照图8可得如下方程组: (4) 式(4)中:(xsj,ysj,zsj)为微型机器鱼的第j个信号源Pj在变压器内的位置;(xdi1,ydi1,zdi1)、(xdi2,ydi2,zdi2)、(xdi3,ydi3,zdi3)分别为第i个定位传感器上的3个压电探头Ci1、Ci2、Ci3在变压器中的位置;vs为超声在变压器油中的传播速度。由式(4)可以得到微型机器鱼的4个信号源的空间位置P1(xs1,ys1,zs1)、P2(xs2,ys2,zs2)、P3(xs3,ys3,zs3)、P4(xs4,ys4,zs4)。根据该4个信号源的空间位置,可以确定微型机器鱼随体坐标系在变压器坐标系中的运动: (5) 式(5)中:Owf(xwf,ywf,zwf)表示微型机器鱼随体坐标系OfXfYfZf坐标原点在变压器世界坐标系OwXwYwZw里的位置;Nwfxo表示微型机器鱼随体坐标系X轴在变压器世界坐标系里的单位矢量;Nwfyo表示微型机器鱼随体坐标系Y轴在变压器世界坐标系里的单位矢量;Nwfz0表示微型机器鱼随体坐标系Z轴在变压器世界坐标系里的单位矢量。 微型机器鱼的姿态用俯仰角а、翻滚角β和偏航角γ进行表述,其表达式为 (6) 式(6)中:Nwxo表示变压器世界坐标系中X轴的单位矢量;Nwyo表示变压器世界坐标系中Y轴的单位矢量;Nwfxo-xy表示Nwfxo在变压器世界坐标系XY平面上的投影;Nwfyo-xy表示Nwfyo在变压器世界坐标系XY平面上的投影。 由式(6)可得变压器微型仿生鱼的姿态,其俯仰角а、偏航角β、翻滚角γ分别如下: (7) (8) (9) 式中:(xs1,ys1,zs1)、(xs2,ys2,zs2)、(xs3,ys3,zs3)、(xs4,ys4,zs4)分别微型机器鱼的4个信号源P1、P2、P3、P4的空间位置。当变压器微型机器鱼移动到定位传感器附近时,定位传感器上的压电探头和特高频探头检测到微型机器鱼发出的信号源。测得的超声信号的电信号根据式(5)~式(9)可以确定变压器微型机器鱼当前的位姿(xwf,ywf,zwf,α,β,γ)。 本文设置的变压器机器鱼定位仿真平台如图9所示。图9中复合传感器中的三个超声传感器分布在法兰圆盘上且相隔120°均匀分布,在法兰盘的中间位置是空间电信号测量天线,将该定位传感器安装在一长800 mm、宽500 mm、高600 mm的有机玻璃箱体上。 图9 变压器机器鱼定位验证平台 变压器微型机器鱼的四个信号发射源在变压器世界坐标系中的坐标分别是P1(235 mm, 374 mm, 350 mm)、P2(265 mm, 426 mm, 350 mm)、P3(224 mm, 415 mm, 350 mm)、P4(276 mm, 385 mm, 350 mm)。超声传感器三个压电探头和电磁波天线在变压器世界坐标系中的坐标分别是C11(500 mm, 200 mm, 200 mm)、C12(500 mm, 243 mm, 125 mm)、C13(500 mm, 157 mm, 125 mm)、U1(500 mm, 200 mm,150 mm)。微型机器鱼4个信号源依次发出声电信号,声波在变压器油中进行传播,在传播过程中存在时间的延迟,结合超声波在变压器油中的传播速度设置为1.450 mm/μs[17-18],可分别获得3个压电超声探头与电磁波天线信号的时间差。其中当机器鱼发射源P1发出声电脉冲信号时:(t11,t12,t13)=(242 μs, 256 μs, 283 μs);当机器鱼发射源P2发出声电脉冲信号时:(t21,t22,t23)=(248 μs, 257 μs, 291 μs);当机器鱼发射源P3发出声电脉冲信号时:(t31,t32,t33)=(263 μs, 273 μs,303 μs);当机器鱼发射源P4发出声电脉冲信号时:(t41,t42,t43)=(226 μs, 240 μs, 270 μs);依据该脉冲信号时间差(模拟示波器采集到的脉冲信号时间差)并结合式(4),采用MATLAB软件仿真计算获得的4个信号源位置,如图10所示。 图10 仿真计算结果 仿真计算获得两组点,其中一组点位于油箱外侧,该组点去掉。将油箱内的另外一组点的位置代入1.3节的变压器机器鱼姿态计算模型,得到的变压器机器鱼位姿定位结果如表1所示。 从表1中可以看出,变压器机器鱼定位仿真结果与图9中的机器鱼的位置与姿态一致。仿真结果表明:基于本文的声-电位姿定位方法并结合构建的变压器机器鱼姿态计算模型,可以实现机器鱼在变压器内的同步定位。 表1 定位仿真结果 针对金属封闭空间内变压器油中微型机器鱼的空间位姿检测问题,提出了基于声-电位姿定位和惯性导航相结合的联合位姿检测方法。并通过分析超声信号在变压器内部及外壳上的传播特性提出了声-电联合定位装置安装方式,并基于内嵌式的安装方式设计了声-电联合定位传感器。 构建了变压器机器鱼姿态计算数学模型,并对变压器机器鱼姿态定位进行了实验测试,测试结果表明:基于本文的声-电位姿定位方法并结合构建的变压器机器鱼姿态计算模型,可以实现机器鱼在变压器内的同步定位。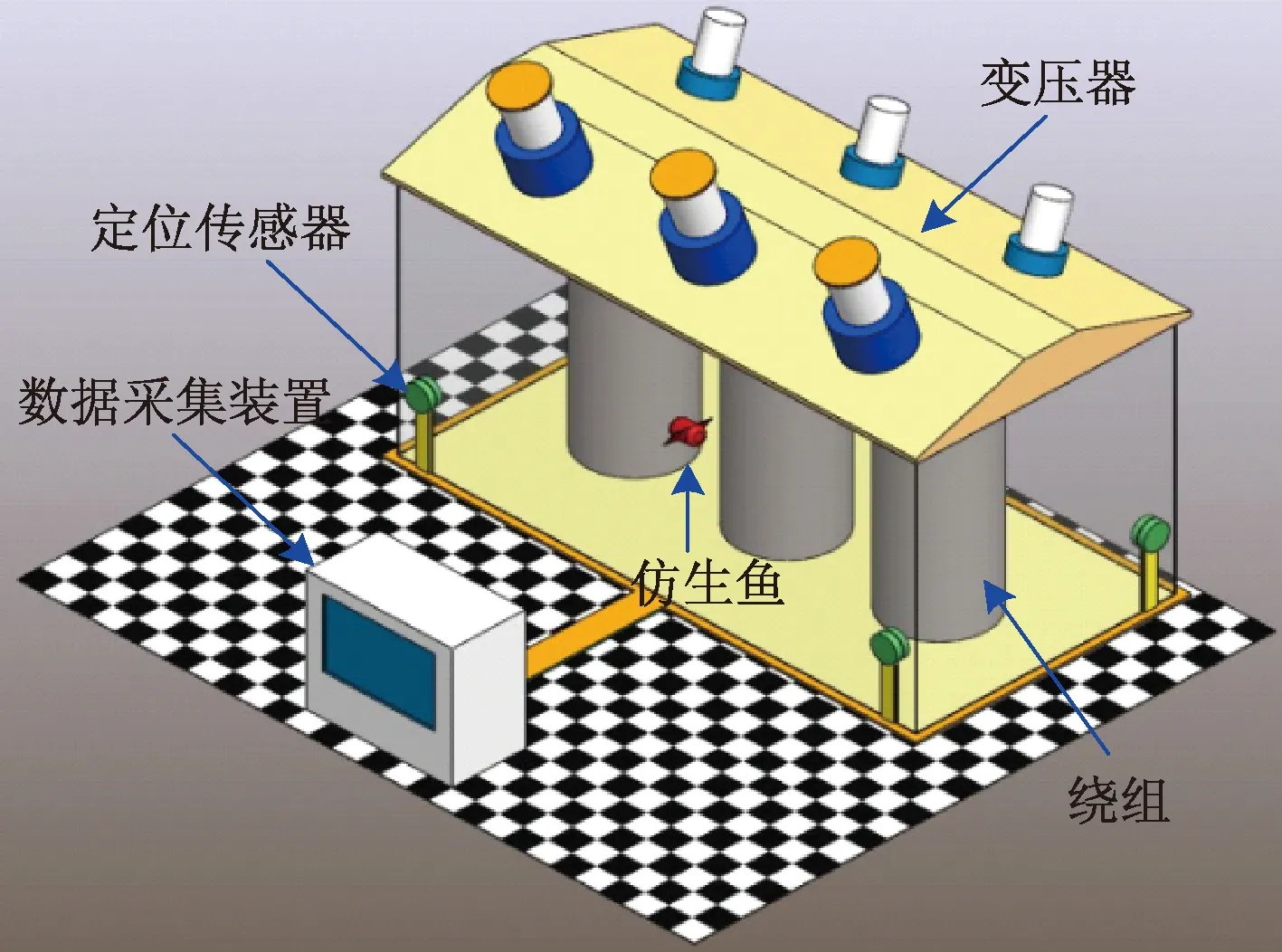
1.2 变压器微型机器鱼定位装置
1.3 变压器微型机器鱼姿态计算数学模型
2 变压器机器鱼姿态定位仿真验证
3 结论
