高铁VoLTE测试中基于小区方位角的定位方法
2020-04-16段宝峰李翠然谢健骊吕安琪
段宝峰 李翠然 谢健骊 吕安琪
(兰州交通大学 电子与信息工程学院,甘肃 兰州 730070)
高铁具有速度高、能耗低、运力大、安全、准点准时等优势,已成为世界优先发展的交通方式[1]。旅客通信和上网等互联网感知的优劣程度,已被纳入高铁舒适度评价体系[2],因此提升网络质量显得尤为重要。Vo LTE测试是发现4G 无线网络问题最直接、最有效的手段之一,是优化高铁网络性能的基础,是实施天馈调整、参数修改和邻区增减等网络优化操作的重要依据。GPS作为高铁Vo LTE 测试工具之一,可以实时测量测试终端的坐标,通过位置信息与网络指标的关联分析,为站址规划和网络优化提供数据支撑。高铁封闭性铝合金厢体对电磁波有很强的穿透损耗,使GPS信号产生严重衰减。例如,CRH 列车厢体穿透损耗约为17 dB,西北区域抗风沙、耐高寒的CRH5G列车厢体穿透损耗高达24 d B[3]。由于受穿透损耗、隧道遮蔽、山体阻挡和U型槽多径衰落等因素影响,造成GPS搜星困难且位置信息容易严重缺失[4-5],给测试与数据分析带来极大困难。
为解决GPS缺失路段的定位问题,学者们提出一些定位方法。文献[6]根据估计的参考信号到达时延差、多普勒频移和列车行进曲线实现了对列车的连续定位;文献[7]基于卫星定位单元管理的大量统计数据,模拟典型的铁路环境对列车位置实施了测量;文献[8]通过实时动态地选择机动模型和调整系统噪声协方差矩阵提高了列车定位精度;文献[9]组合高铁地图、卫星和惯导装置完成了对列车位置的估算;文献[10]利用无线传感器和GPS进行定位,在GPS缺失时由传感器根据惯性导航技术提供定位数据;文献[11-12]开发了GLLS(GPS列车定位系统),根据多天线测量车辆航向角计算列车进入侧线的概率,实现了高铁厢体内的定位。
然而文献[6-8]是基于最优化估计理论的定位,若用于Vo LTE测试则需要对测试软件进行修改。文献[9-12]利用了卫星接收机数据和辅助仪表共同实施定位,无法解决在Vo LTE测试中GPS缺失路段的定位问题。本文在不修改测试软件和不增加测试仪表情况下,分析了高铁基站布局原则和Vo LTE 测试特征,以小区方位角、高铁地图、铁路轨道离散化的经纬度点数与测试终端RSRP(Reference Signal Receiving Power)采样点数为计算依据,通过均匀插值等量、缺失的轨道经纬度信息,实现了对测试终端的定位。对兰新高铁酒泉南站—张掖西站的高铁线路进行了现场测试和仿真分析,评估了所提方法的定位精度。
1 高铁基站布局与VoLTE测试
1.1 基站布局原则
高铁无线网络覆盖除考虑基站(e NodeB)间距、天线挂高等基础工程参数外,合理的天线方位角(天线主瓣方向与正北方向的夹角)设置可有效控制小区覆盖范围和信号掠射角(基站信号与列车厢体的夹角)大小,减少网络盲区和穿透损耗。在物理环境简单的平原路段,基站分布相对稀疏,而在山地、沟堑等复杂场景,基站分布相对密集。基站布局模型见图1,平均基站间距,即相邻两个基站的平均直线距离为800~1 600 m,天线为窄波瓣高增益天线,天线方位角的设置以满足连续覆盖、增大主瓣方向与厢体的掠射角为网络规划的设计前提。同时考虑到基站覆盖距离和会车相互阻挡等因素,天线挂高与轨道平面垂直距离通常设置为15~45 m。基站与钢轨垂直距离为50~200 m,若距离太近则掠射角减小、穿透损耗增大,距离太远则多径损耗增大、覆盖效果较差。对于直线轨道,相邻基站交错分布在铁路两侧,形成“之”字结构;对于弯道,基站架设在弯道内侧,以保证覆盖的均衡性。
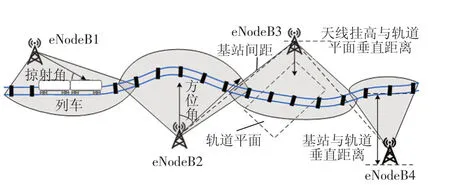
图1 高铁基站布局模型
以西北地区兰新高铁线路的4G 移动网络建设为例,说明不同场景具有不同的工程参数。
(1)兰州站—兰州西站的穿越城区场景:平均基站间距为0.98km,基站与钢轨平均垂直距离为91 m,天线挂高与轨道平面平均垂直距离25 m,天线属性为水平半功率角65°、增益18 dB。
(2)兰州西站—西宁站的隧道场景:泄漏电缆与钢轨平均垂直距离为3 m,与轨道平面平均垂直距离5 m,天线属性为水平半功率角35°、增益11 d B。
(3)酒泉南站—张掖西站的多山地场景,平均基站间距为1.21km,基站与铁轨平均垂直距离为127 m,天线挂高与轨道平面垂直距离39 m,天线属性为水平半功率角32°、增益21 d B。
(4)玉门站—柳园南站的戈壁抗风沙U型槽场景,平均基站间距为1.24km,基站与钢轨平均垂直距离为115 m,天线挂高与轨道平面平均垂直距离43 m,天线属性为水平半功率角33°、增益21 d B。
1.2 VoLTE测试中的GPS缺失
在高铁Vo LTE 测试中,测试工具除GPS外还包含Pioneer测试软件、两部终端和一台笔记本电脑。测试软件以采样周期为间隔记录测试终端和GPS的采集数据。通常测试终端约间隔1 s上报1次参考信号接收功率RSRP 信息,GPS上报1次经纬度信息。测试终端和GPS采集数据经过关联分析,可得到每个位置点的RSRP值。然而在GPS缺失情况下,则无法确定每个基站的覆盖范围,使基站地址规划、网络结构调整失去了位置信息支撑。位置信息的缺失,导致无法评估每个测试点的通信质量,对邻区优化、参数调整造成极大困难。2016年兰新高铁Vo LTE 测试时GPS采样数据量和缺失数据量的对比见图2。定义
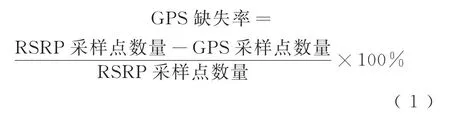
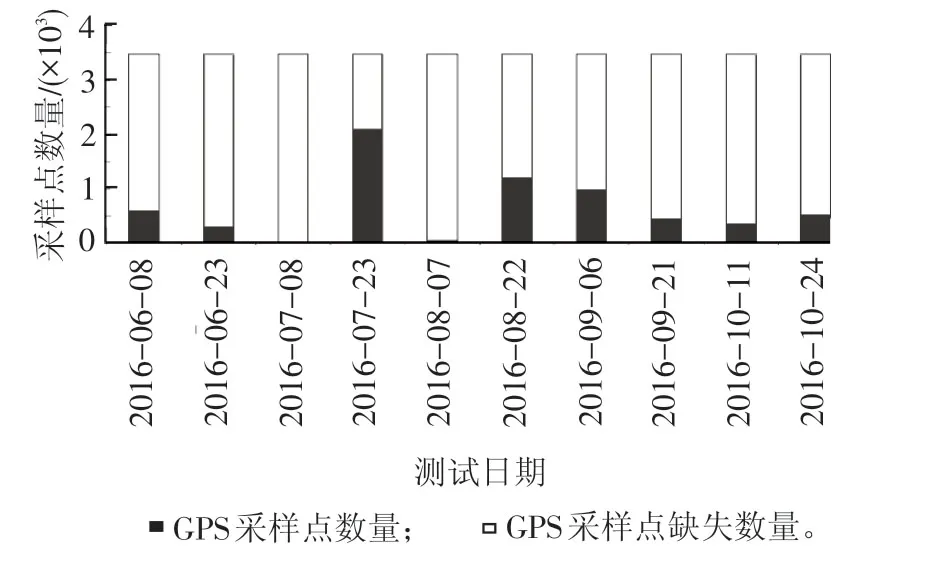
图2 GPS采样点统计
当没有位置信息时,RSRP值则无法在地图上呈现。不同地形下的RSRP 渲染效果见图3,GPS轨迹点的颜色有深绿、浅绿、梅红和大红4种,分别代表RSRP质量为优、良、中、差。由图3可见,高铁厢体的高穿透损耗以及隧道遮蔽、山体阻挡和U型槽多径衰落等恶劣的地形因素导致Vo LTE 测试中的GPS 缺失问题极其严重。此外大气波导的影响使高铁厢体内微弱的GPS信号无规律可寻。

图3 不同地形的RSRP渲染图
2 基于小区方位角的定位方法
基于以上分析可知,在中国西北高寒风沙区域修建的高铁的列车厢体内经常以较高的概率面临GPS信号缺失问题。由此导致Vo LTE 测试失去位置信息的支撑,使天馈调整、参数修改和邻区增减等网络优化操作无法有效实施,严重制约了高铁无线网络性能的优化与提升。为此需要一种高效的定位方法,以解决在Vo LTE测试中GPS缺失路段的定位问题。
2.1 定位模型与定位流程
基于小区方位角的定位方法模型见图4。图4中,eNodeB2 基站包含两个小区(分别对应两副天线),正北方向顺时针与两副天线主瓣方向的夹角分别为β1和β2,即eNodeB2-1 小区的方位角为β1,eNodeB2-2小区的方位角为β2;基站之间的切换点表示测试终端在此位置前后占用的服务小区发生切换;A1、A2、A3和A4为天线主瓣方向射线与轨道曲线的交点;B1为eNodeB1 与eNodeB2的切换点,测试终端在B1左侧轨道上占用eNodeB1无线资源,在B1右侧轨道上占用eNodeB2无线资源;B2为eNodeB2与eNodeB3的切换点,测试终端在B2左测轨道上占用eNodeB2无线资源,在B2右测轨道上占用eNodeB3无线资源。可以看出,eNodeB2覆盖的轨道在B1、B2点之间,由此可确定高铁沿线每个基站的覆盖范围。若测试终端占用eNodeB2时GPS 信号缺失,可用B1、B2点之间的轨道经纬度补偿缺失的位置信息。
高铁Vo LTE测试中基于小区方位角的定位方法流程见图5。
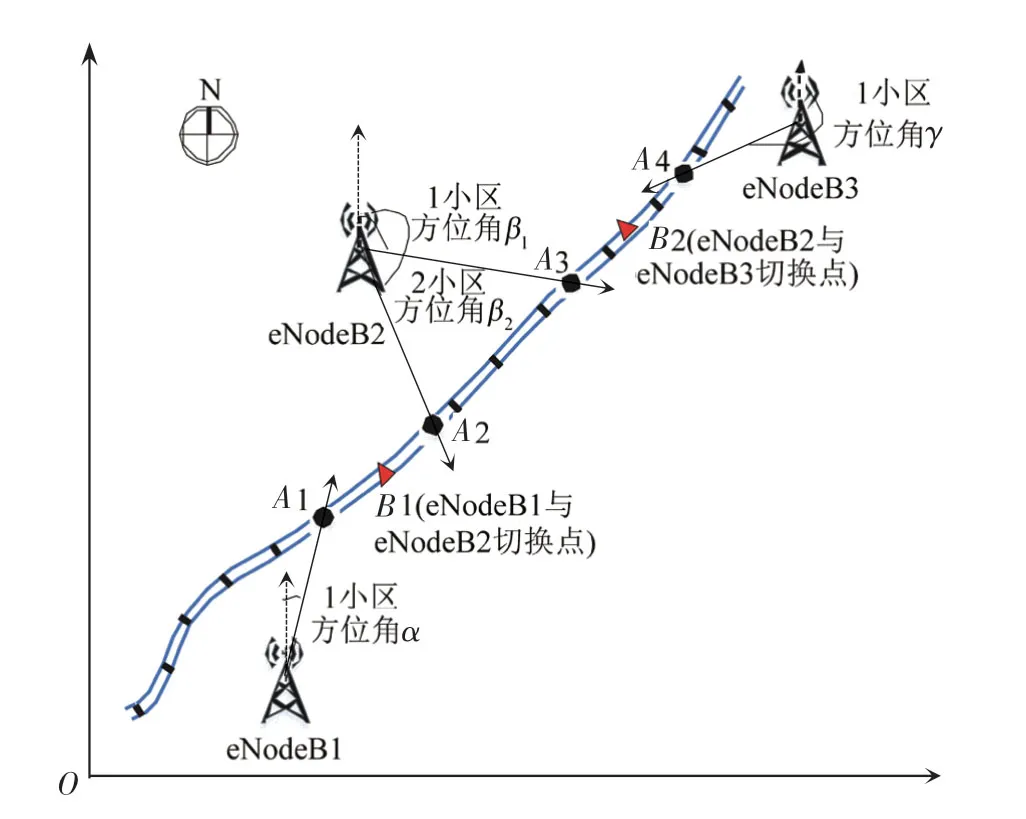
图4 基于小区方位角的定位方法模型
2.2 定位方法
将高铁地图离散化为经纬度点,经纬度点之间的距离取值为5 m。铁路轨道曲线方程可通过拟合方法得到。利用Matlab的Curve Fitting Tool对张掖西站—酒泉南站轨道地图进行4阶高斯拟合,得到轨道曲线方程为

式中:a、b、c为待定参数。
对式(2)两边取自然对数,得到

其中,
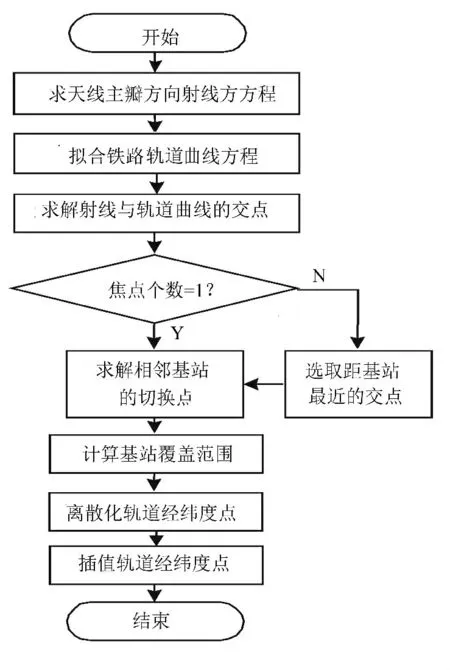
图5 定位方法流程
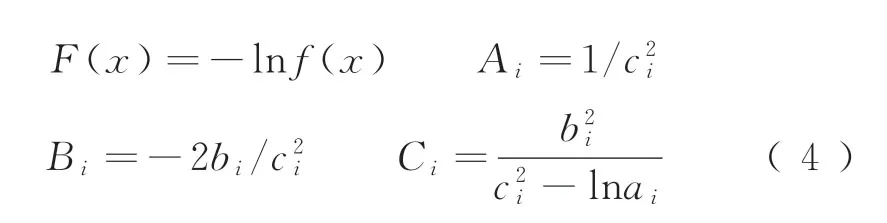
根据最小二乘法原理,参数Ai,Bi和Ci满足
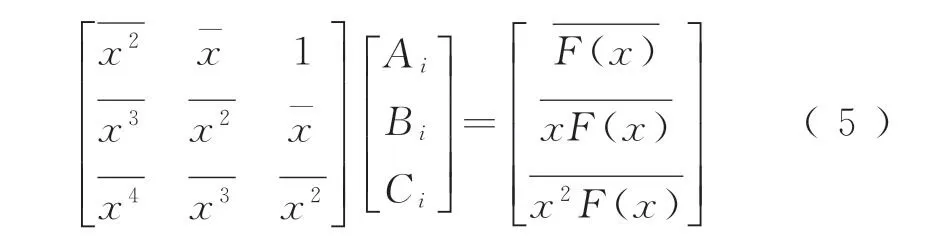
其中,上横线表示平均。由此可计算出4阶高斯拟合的参数取值为
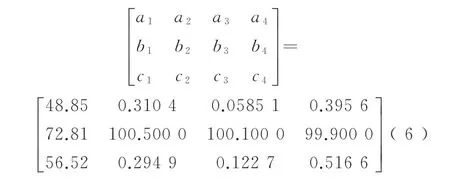
将式(6)代入式(2),即可得到铁路轨道曲线方程。由于eNodeB1-1小区、eNodeB2-1小区、e NodeB2-2小区和eNodeB3-1小区的方位角分别为α、β1、β2和γ。设eNodeB1、e NodeB2和e NodeB3的二维位置坐标分别为(x1,y1)、(x2,y2)和(x3,y3)。则eNodeB1-1小区、eNodeB2-1小区、eNodeB2-2小区和eNodeB3-1小区的天线主瓣方向射线方程分别为
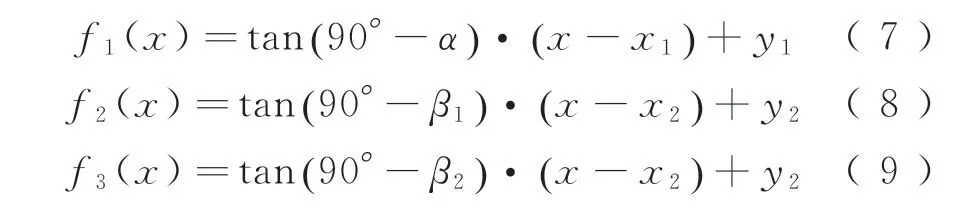

理论上天线主瓣方向射线方程和高铁轨道拟合曲线方程存在着无数个交点。在地理坐标北纬39°时,经度间隔为1°的距离约108km。由于最大基站间距为1.6km,为避免方程解为无限集,本文考虑在eNodeB经度±0.02°(距离2km)范围内求其实数解。当有且仅有1个解时,此解即为天线主瓣方向射线与高铁轨道拟合曲线的交点坐标,记为和,可表示为
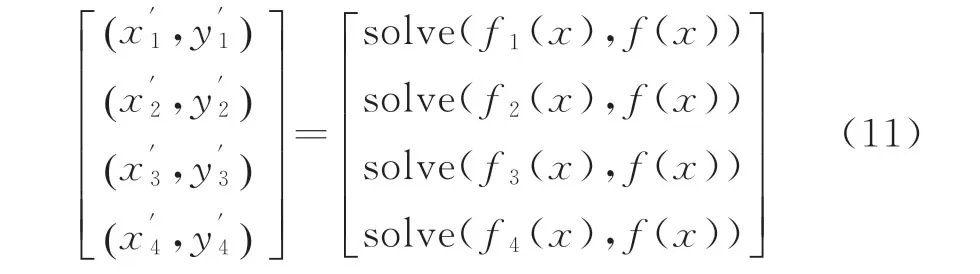
考虑eNodeB1-1 小区天线主瓣方向射线方程f1(x)与高斯拟合轨道曲线方程f(x)多交点的情形。若eNodeB1在经度±0.02°范围内有N个解(交点),解集可写为{(x′1j,y′1j)},j=1,2,…,N。假设{(x′1n,y′1n)}(1≤n≤N)距离e NodeB1最近,可表示为
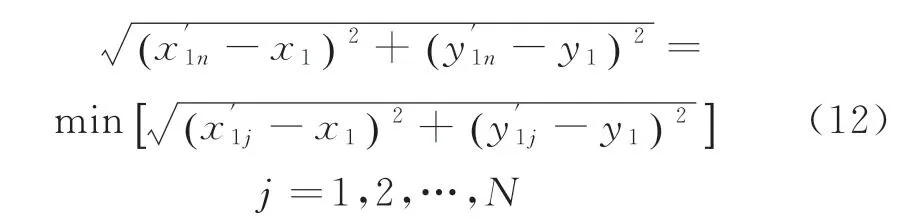
则保留第n个解,(x′1n,y′1n)即为交点A1的坐标。同理,可求出交点A2、A3和A4的坐标。
理想情况下,切换点与相邻的两个交点的距离相等,即在图4中eNodeB1和eNodeB2的切换点B1距离交点A1、A2的距离是相等的,e NodeB2和eNodeB3的切换点B2距离交点A3、A4的距离相等。因此,得出切换点B1、B2的坐标(x′B1,y′B1)和(x′B2,y′B2)满足以下方程
切换点B1、B2之间的轨道即为eNodeB2在高铁轨道上的覆盖范围。同理可以得到高铁沿线所有基站的覆盖范围。
通常Vo LTE测试终端约1 s上报1次RSRP信息,同时附着1次GPS位置信息。若以高速列车匀速行驶200km/h估算,Vo LTE测试仪表采样距离为55 m,高铁地图离散化的经纬度点之间的距离为5 m,精度是仪表采样距离的11倍。由于离散化的轨道经纬度点数目远大于测试仪表采样的经纬点数目,由此可用于插值缺失的GPS位置信息。若列车以匀速行驶,测试终端在eNodeB2覆盖范围内缺失了GPS位置信息,令m为RSRP 采样点数目,M为轨道上切换点B1、B2之间的离散经纬度点数目,则插值周期为

若列车非匀速行驶,可将B1、B2点之间的非匀速路段划分为K个匀速路段。令第mk为第k个匀速路段的RSRP采样点数目,Mk为第k个匀速路段轨道上的离散经纬度点数目,则插值周期为

因此,以插值周期T提取的切换点B1、B2之间的离散经纬度点可作为测试终端在eNodeB2覆盖范围内的位置信息,从而实现了任何采样时间GPS缺失时的测试终端定位。
3 测试结果与分析
为验证本文提出的小区方位角定位方法,分别在兰新高铁5个车站之间进行了测试。有效测试里程192km,GPS 信号盲区124km。GPS 缺失情况见表1。
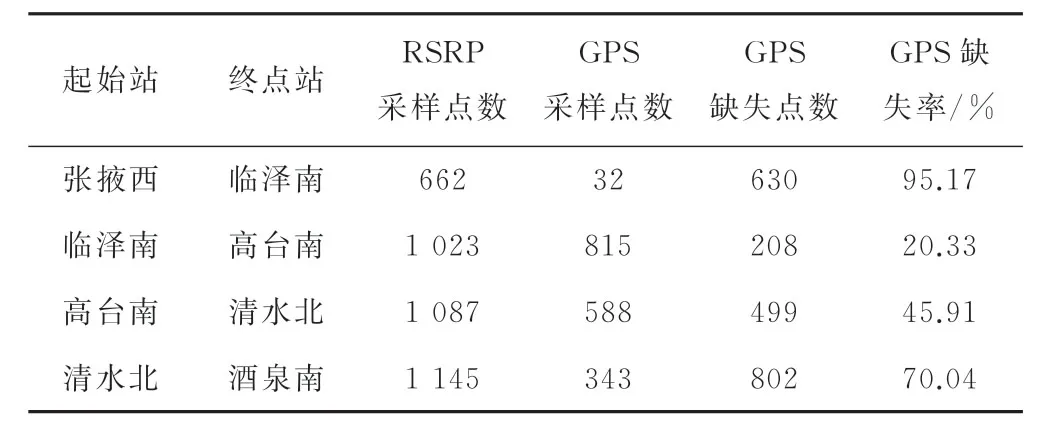
表1 GPS信号缺失情况
3.1 缺失GPS的定位方法补偿效果
小区方位角定位方法的仿真通过Matlab仿真工具完成。Vo LTE测试中酒泉南站—张掖西站位置信息补偿效果见图6。图6中共有8段长短不等的轨道线路缺失GPS信号,可见每一段定位曲线均能与测试GPS曲线平滑衔接,补偿效果较好。
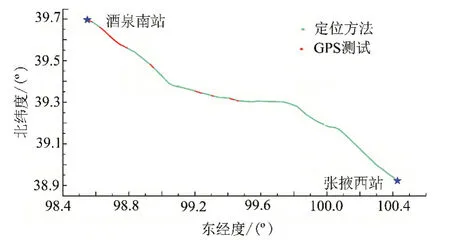
图6 酒泉南站—张掖西站定位补偿效果
不同GPS缺失率时的位置信息补偿见图7。图7(a)中,GPS缺失率为95.17%,靠近临泽南站的缺失GPS位置信息的主要地形为山地地形;图7(b)中,GPS缺失率为20.33%,缺失GPS位置信息的大部分测试路段地形以平原为主;图7(c)中,GPS缺失率为45.91%,因为蓝色路段的车速较红色路段快,所以在采样点数量偏少的情况下显示测试轨迹较长,测试路段地形含隧道、U型槽和平原等;图7(d)中,GPS缺失率为70.04%,靠近清水北站缺失GPS位置信息的主要地形为平原地形。

图7 不同GPS缺失率下的定位补偿效果
以酒泉南站—张掖西站为例,GPS与定位方法的RSRP网络覆盖对比见图8。图8中,RSRP区间对应的颜色有蓝紫色、草绿色、水蓝色、黄色、红色5种,分别代表相应位置网络覆盖质量为优、良好、一般、较差和极差,数值见图8。

图8 GPS测试与定位方法的RSRP/dBm网络覆盖比较
3.2 定位误差
为评估小区方位角定位方法的定位精度,可对有GPS测试数据的轨道线路进行位置信息补偿分析,定位精度为插值周期提取的离散经纬度点与GPS测试点之间的距离差,可用均方根误差衡量。均方根误差为

离散经纬度点和GPS测试点的经度、纬度拟合曲线分别见图9(a)、9(b),曲线拟合效果可用RMSE值来评估。对比图9(a)、9(b)可知,定位方法的经度、纬度补偿偏差走势基本一致,但不完全重合。经度RMSE值为5.45 m,纬度RMSE值为5.98 m。定位方法离散经纬度点和GPS测试点的位置信息拟合曲线见图9(c),RMSE定位误差为8.09 m,满足高铁Vo LTE测试数据分析要求的位置信息精度。
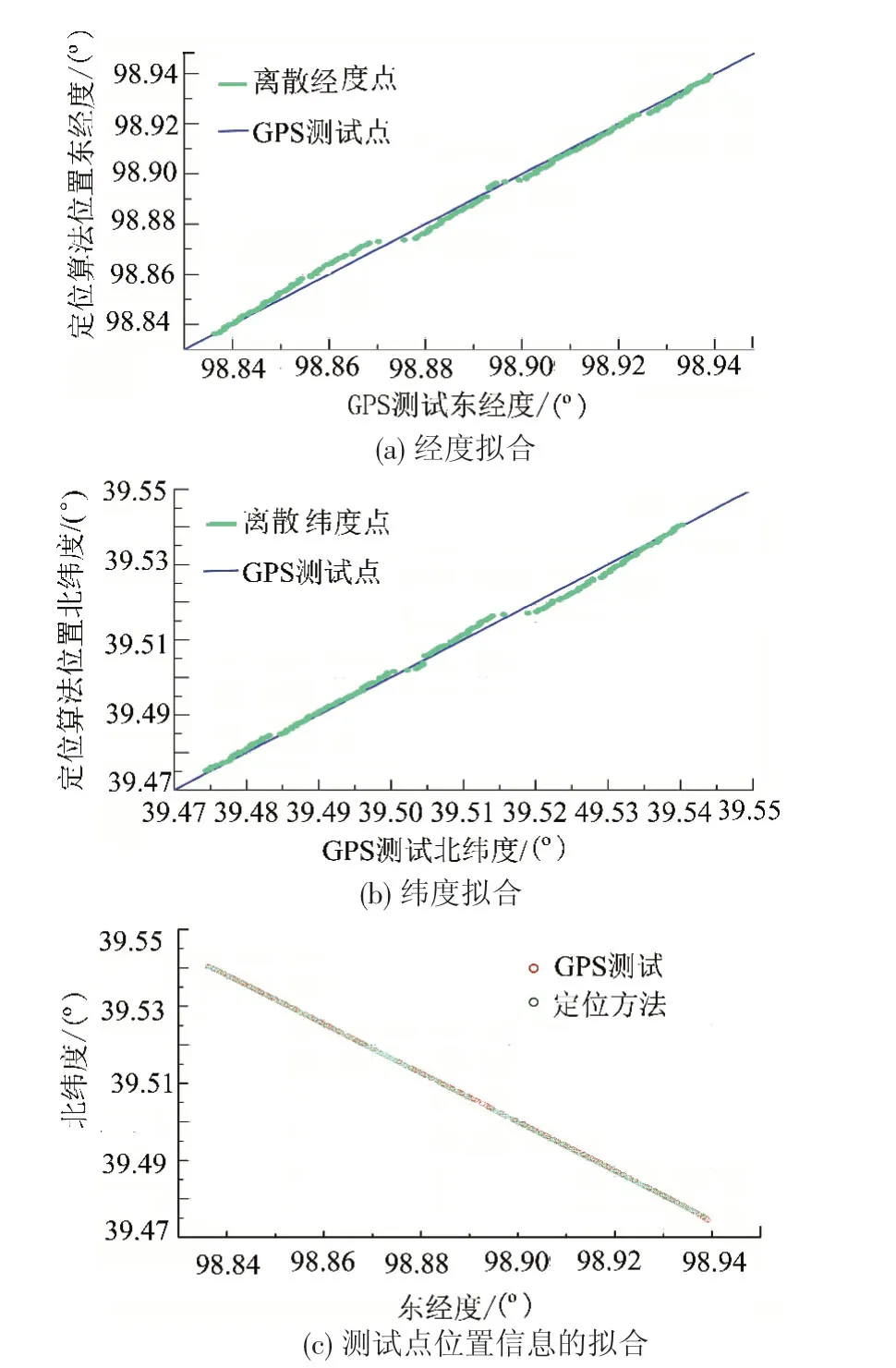
图9 定位方法与GPS的拟合曲线
4 结论
本文为解决高铁Vo LTE 测试中GPS 严重缺失的问题,提出一种利用通信基站工程参数小区方位角和高铁地图离散经纬度点的定位方法,通过分析测试结果和对比定位补偿效果,得出以下结论:
(1)高速列车封闭性铝合金厢体对电磁波的穿透损耗和轨道两侧的地形地貌产生的多径效应引起的信号衰落等因素易导致Vo LTE测试GPS缺失。
(2)在不同GPS缺失率的情况下,即全程或者部分路段GPS缺失时,基于小区方位角的定位方法均能定位测试终端的位置,对高铁沿线网络操作提供经纬度坐标依据。
(3)提出的定位方法能够以较高精度获取测试终端的位置信息(定位精度约8 m),可用于GPS缺失时的网络质量关联分析,对高铁网络覆盖评估具有重要意义。