面向人体骨切削的超声骨刀整体设计与仿真分析*
2020-04-15刘子豪孙春生蔡晨需张勤河
刘子豪,孙春生,蔡晨需,张勤河△
(1.山东大学机械工程学院 ,济南 250061;2. 山东大学 高效洁净机械制造教育部重点实验室 机械工程国家级实验教学示范中心,济南 250061)
1 引 言
近年来,我国骨科疾病发病率日益升高。据最新发布的《2018中国卫生和计划生育统计年鉴》显示,2018年我国15岁及以上居民的骨骼类疾病的患病率已经达到4.26%,自2003年至2018年呈逐步增长的态势。在整形外科、关节外科、脊椎外科或微创神经外科的临床手术中,均离不开对骨头材料的切削加工。这不仅要求对目标骨组织的精准切削,还要求对骨组织及周边血管、神经组织带来的机械及热损伤降至最低,尽量避免出现骨髓损伤、神经根损伤、血管破坏、硬膜囊撕裂等并发症。不恰当的骨切削会给患者带来术后疼痛,甚至造成机体不可修复的损伤[1-3]。
由于技术的限制,现有的传统手术刀均为单刃结构,很难切断较硬的骨骼组织,效率较低。超声波振动辅助特种加工和超声波振动辅助临床治疗技术是近几年国内外研究的热点之一,在工程和医学领域出现了许多新的加工和治疗技术,如超声波振动辅助电火花加工技术[4]、超声辅助切割组织技术[5-6]、超声波碎石技术[7]、超声波洁牙技术[8]等。超声骨刀因其可以通过控制频率和振幅,仅对声阻抗高的骨组织产生直接的作用,而对声阻抗低的神经、血管、组织无作用,保证了手术安全性,逐渐被应用于临床中。超声换能器是超声骨刀的重要组成部分,能将电功率转换成机械功率。超声换能器主要分为压电换能器和磁致伸缩换能器[9],压电换能器具有成本低、结构简单的特点,被广泛应用于小功率超声加工装备中[10]。变幅杆主要实现振动系统的能量聚集和传输,可以将换能器输出的机械振动位移或速度振幅进行放大。贺西平等[11]阐述了常用的设计变幅杆的方法,如等效电路法、有限元法、机械阻抗法、传输矩阵法、表观弹性法等。常小龙[12]、蔡耀中等[13]分别用解析法和ANSYS仿真分析法设计了变幅杆,并验证了两种方法设计得到的变幅杆精确度均可达到实验要求。目前超声骨刀的核心关键技术仍被国外公司垄断,如德国速林(SONOCA)、美国(misonix),国内仅有几家公司有较为完善的产品,如水木天蓬、速迈,且整体性能仍有一定的差距。国内对超声骨刀的理论研究还处于初级阶段,谢蛟龙[14]针对牙科种植,设计了弯曲超声骨刀刀头;雷雨[15]对人体口腔牙种植超声骨刀的刀头进行了研究,设计了不同形状的超声种植骨刀刀头;曹颖[16]、张鹏等[17]通过临床试验,将超声骨刀与传统骨刀进行对比,讨论了超声骨刀的临床应用情况。
超声骨刀虽然目前在临床上已有应用,但理论分析较少,研究主要集中在临床效果分析。国内外对超声骨刀振动系统的重要组成部分单独研究较多,但对超声骨刀振动系统的整体研究较少,尤其是对整体结构设计和改进优化的研究。本研究对超声骨刀提出了整体结构设计与优化方法,并用ANSYS软件进行模态分析和谐响应分析,对超声骨刀进行尺寸优化,最后通过实验验证有限元计算结果,设计出基本满足临床需要的超声骨刀,验证了设计方法的合理性。
2 超声骨刀振动系统的设计
超声骨刀的振动系统由超声换能器、超声变幅杆和超声刀头三部分组成。超声波在介质中传播时,介质中质点产生高频振动。当振动频率F=40 kHz 时,质点加速度幅值可达 8×105g(g为重力加速度),这使得超声骨刀可以迅速将活体生物组织中的脆硬组织切开,且周围软组织不被伤及[18]。本研究设计的超声骨刀频率为40 kHz,振幅不小于100m。考虑到超声骨刀的特殊工作环境,材料整体选择声损耗系数小、声阻抗低、耐腐蚀的钛合金材料。为方便临床医生握持,骨刀直径范围控制在20~30 mm。
2.1 超声骨刀换能器的设计
本研究所使用的超声换能器是夹心式压电陶瓷换能器。设计换能器时,应为半波长或者半波长的整数倍,以减少谐振时连接面上的阻抗。

图1 超声换能器示意图
本研究设计的夹心式超声换能器为半波长,见图1,整体采用TC4,形状设计为圆柱形,直径为20 mm。通过解析法初步计算,后盖长度为10 mm。压电陶瓷材料选择PZT-4,外径为20 mm,厚度为3 mm,片数为4。在压电陶瓷片之间以及压电陶瓷片和后盖之间添加电极片,材料为黄铜,厚度为0.2 mm,片数为4,总长度为0.8 mm。前盖板长度为30 mm,材料为TC4。后盖板、压电陶瓷片和前盖板通过中心螺栓进行连接,中心螺栓材料选择为TC4。
2.2 超声骨刀变幅杆及超声刀头设计
超声变幅杆可以将换能器末端的振幅扩大,具有聚能作用。考虑到超声骨刀所需的振幅较大以及易操作性和操作视野等因素,变幅杆形状选择一端接圆柱的半波长复合圆锥型变幅杆,材料为TC4,通过初步理论计算,圆柱段长度为37 mm,直径为24 mm,圆锥段长度为40 mm,小端直径为7.5 mm,通过连接螺栓与换能器前盖进行连接,螺栓材料为TC4,尺寸为M6×10,在变幅杆前段设立法兰,方便之后装夹,见图2。
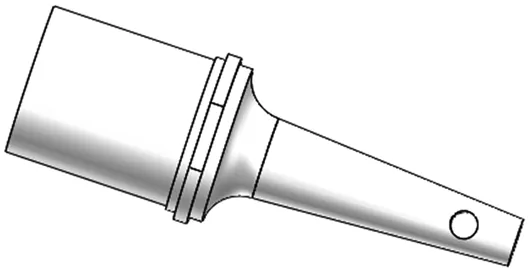
图2 超声变幅杆示意图
超声刀头是超声骨刀振动系统的重要组成部分,与变幅杆的末端相连。通过合理设计刀头尺寸,可以将其与换能器和变幅杆进行匹配,使整个振动系统达到谐振状态。由于换能器和变幅杆是按半波长设计,当刀头在工作频率下也达到半波长谐振状态时,就可以使整个振动系统产生谐振,并使刀头末端输出幅值最大。因此超声刀头材料选择TC4,初步计算长度为70 mm,大端直径7.5 mm,忽略前端刀刃,小端直径为4 mm。超声刀头结构见图3。

图3 超声骨刀刀头示意图
3 有限元系统建模
利用Solidworks建立超声骨刀结构模型,为了便于仿真分析,去掉超声骨刀外壳,简化模型,简化后的模型见图4。
将Solidworks建立的三维模型文件格式转换为.X_T格式,导入ANSYS workbench中,定义各部分材料属性,进行整体有限元仿真。超声骨刀各部分材料属性见表1,主要包括材料的密度、弹性模量和泊松比。考虑到超声骨刀整体属于轴类结构,对网格划分的精度要求不高,因此采用自由网格划分法对超声骨刀模型进行网格划分。
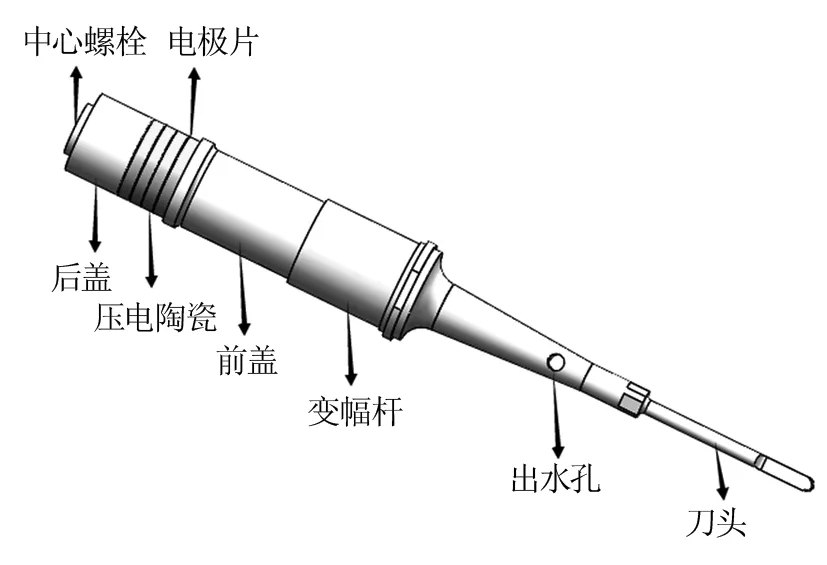
图4 超声骨刀简化示意图
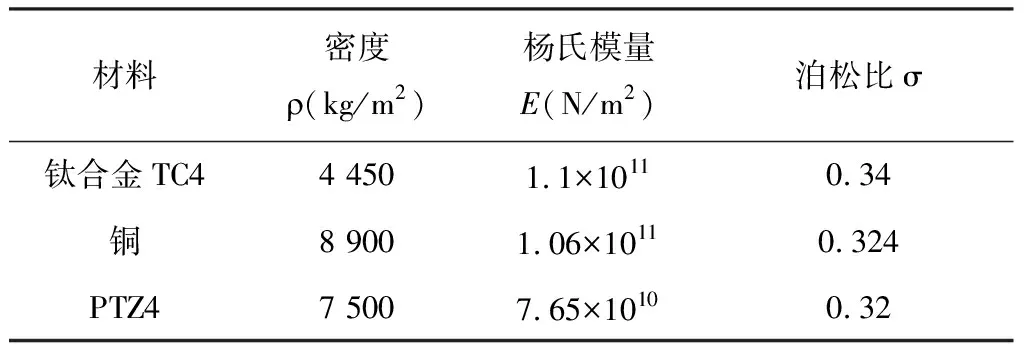
表1 材料参数定义表
4 模态分析和谐响应分析
通过ANSYS对超声骨刀各部分尺寸进行整体优化,优化后的尺寸见表2。将优化后的超声骨刀模型进行仿真,得到最终的模态分析图和谐响应分析图。
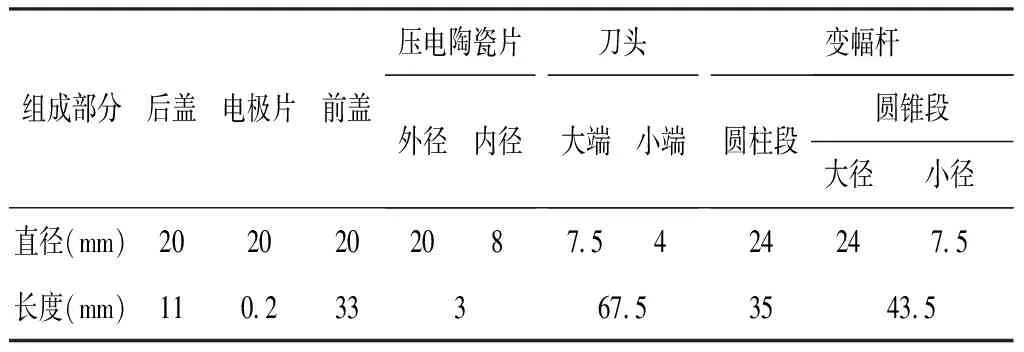
表2 优化后各部分结构尺寸
4.1 模态分析
通过ANSYS模态分析得到频率接近40 kHz的超声骨刀的8阶固有频率,分别为36 193、36 931、37 270、39 776、40 188、42 179、42 582、44 835 Hz,各阶模态下的振动情况见图5。超声骨刀在36 193、36 931、37 270、39 776、42 179、44 835 Hz时,以弯曲振型为主;在42 582 Hz时,以扭转振型为主,这些频率下换能器、变幅杆和刀头的扭曲均比较严重。超声骨刀在40 188 Hz时为沿轴线方向的纵向振动,最大位移位于刀头前端,此时的振动情况最为理想,其纵振频率为40 188 Hz,与超声骨刀的工作频率40 kHz非常接近,偏差为577 Hz,误差仅为1.4%,与理论相符,满足设计要求。



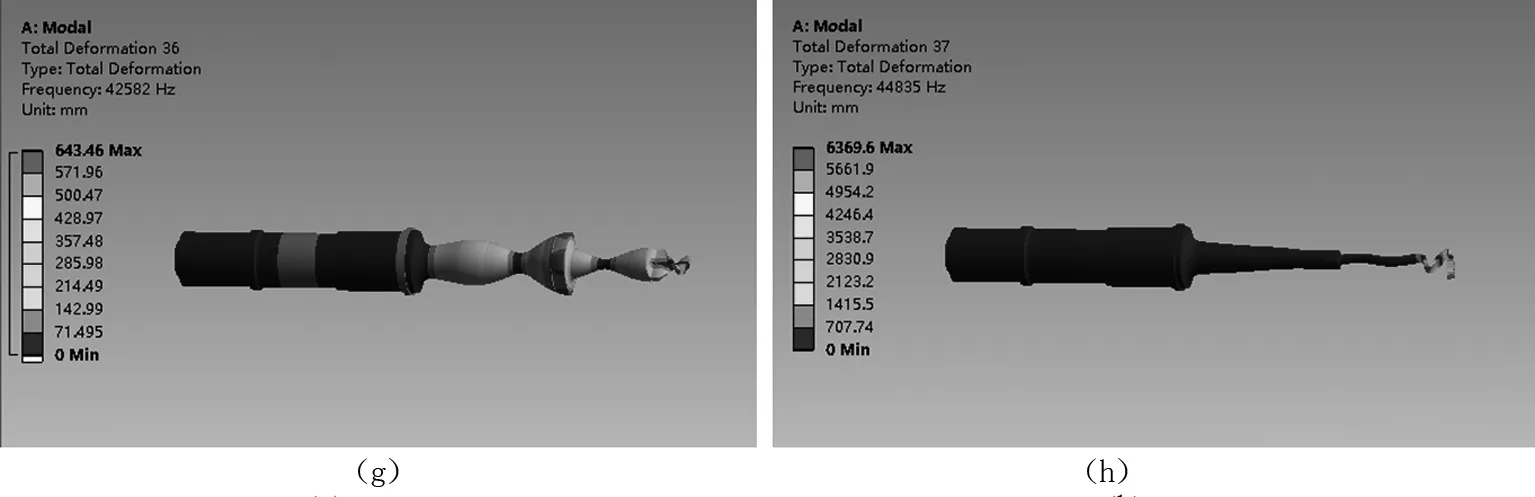
图5 超声骨刀8种模态振动情况
4.2 谐响应分析
谐响应分析是研究线性结构受到随时间按正弦规律变化的载荷时的稳态相应。采用完全法(Full)对超声骨刀进行谐响应分析,研究超声骨刀在谐振频率为40 188 Hz附近的响应特性,取频率范围为39 000~41 000 Hz,取激振位移幅值为5m(4片压电陶瓷的输出位移通常为5m左右),分析超声骨刀的位移和应力情况,得到超声位移、应力云图以及刀头响应曲线图,见图6、图7。
由图6可知,超声骨刀在刀头位置位移变形最大,此时刀头输出振幅最大,约为110~120m,最大应力出现在刀头直径变化处,为740 Mpa,小于钛合金的最大抗拉强度900 MPa,符合设计要求。由图7可知,频率在39 600~40 000 Hz之间出现响应最大值,与设计频率40 000 Hz的误差约为1%,考虑到整体仿真存在一定误差,可以认为达到设计要求。

图6超声骨刀位移云图和应力云图
Fig.6Displacement nephogram and stress nephogram of ultrasound bone scalpel
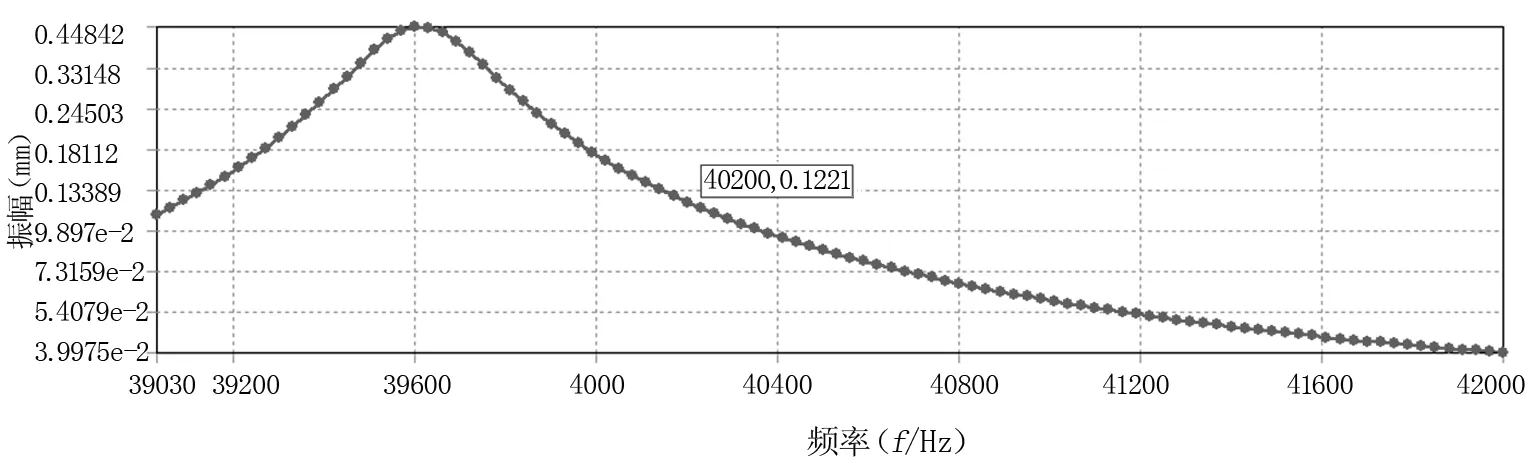
图7 超声骨刀位移响应曲线图
5 实验检测
根据理论计算和仿真优化,将设计好的超声骨刀进行加工装配,得到超声骨刀的实物,见图8。

图8 超声骨刀实物图
通过进行阻抗分析检测与幅值检测,与国内目前技术领先的水木天蓬超声骨刀进行对比,验证设计的合理性,其中水木天蓬超声骨刀的振动频率为39.5 kHz,振幅小于120 μm。
5.1 阻抗分析
利用阻抗分析仪(Bandera,PV70A)对超声骨刀进行阻抗分析,得到导纳圆图和对数图,见图9。导纳圆图无寄生圆,振动系统设计合理,振动性能稳定。谐振频率为40 619 Hz,基本与仿真结果一致,与仿真值40 188 Hz相差较小,忽略换能器和刀头的加工误差以及装配误差,在偏差值允许范围内。

图9 超声骨刀阻抗分析结果
5.2 幅值检测
目前超声振幅的测量方法主要有光学测量法、电测法以及物理观察法。对于振幅超过10m,精度要求不高的位移振幅进行测量时,可使用显微镜观察法[19]。根据医药行业标准YY/T 0644-2008中关于超声手术刀的显微测量方法进行平台搭建,见图10,通过多次测量,测得输出振幅约为110m,与仿真结果相差不大,满足设计要求。

图10 振幅测试平台
6 结论
本研究针对超声骨刀的工作原理,提出了超声骨刀整体结构设计方法,对超声骨刀进行了整体结构设计,包括超声换能器、超声变幅杆以及超声刀头。并用ANSYS软件对超声骨刀进行了模态分析和谐响应分析,对超声骨刀进行了整体尺寸优化,并通过实验验证了设计的合理性。最终设计的超声骨刀频率为40 619 Hz,振幅约为110m,基本满足临床需要。本研究的设计思路为超声骨刀的整体设计提供了理论支持,为超声骨刀的后续改进和优化提供了方向,对同类型医用超声设备的设计起到了一定的指导作用。
