基于UG的3T-3R并联机构建模仿真研究*
2020-04-15徐军委费铖邦蒯苏苏杨海鹏
徐军委 费铖邦 蒯苏苏 杨海鹏 王 振
(1.江苏大学 机械工程学院 江苏镇江212013;2.哈尔滨工业大学 机电工程学院 哈尔滨150001)
随着自动化与智能化的发展,并联机器人的运动学的研究在机器人的设计和轨迹规划方面中占有重要地位,六自由度并联平台研究和开发在未来的发展中,会有相当重要的作用。1965年D Stewart首先提出将六自由度机构用作训练飞行员的飞机模拟器。此后这种“Stewart平台”、底座和六个驱动器所组成的并联机构引起了广泛的关注,
文献[1]给出了 3T-3R并联机构拓扑结构类型及其结构特征;文献[2]中用影响系数法对 6杆并联机构进行了运动分析,但两者都没有针对杆的伸缩位移、速度、加速度与动平台的速度、加速度之间的关系作更深入的研究。本文对六自由度并联机构,采用拓扑结构形式和铰副配置后,针对这类多自由度、多关节的机构,用UG仿真方法,模拟了当给定六个并联支链速度时,动平台的位移、速度和加速度的变化情况,验证方案的可行性。
1 UG三维建模并联机构
1.1 并联机构的总体结构
机械结构由静平台、动平台、连接静平台与动平台的六个并联支链组成,每个支链均由五个平行四边形机构串联组合成伸缩链,并联机构中六个并联支链空间互相平行,其中每个支链中的第一个平行四边形顶端均分别与静平台S球副轴连接,每个支链中的第五个平行四边形顶端均分别与动平台S球副轴连接,形成3T-3R六自由度并联机构。
基于机构拓扑结构理论优选出支链的拓扑结构是混合单开链类型,对于4R平行四边形机构,其活动度F=1,运动输出特征矩阵为即输出构件1相对于对边构件0只有一个独立平移输出,方向垂直于R副轴线,构件 1上任一点A的轨迹为圆,其半径为lR3R4,圆心为OA,且OAA‖R3R4,如图1(a)所示。该机构的运动输出特征等效单开链为
在平行四边形对边构件上串联一个R副和相互平行的两R副,即形成了平行四边形机构串联组合伸缩链,为了更清楚地描述系统构件的速度和加速度,单个支链其拓扑结构示意图如图1(b)所示,构件1、构件2与静平台14以球副S1连接,构件11、构件12与动平台13以球副S7连接,构件3与构件4铰链连接为A001、构件5与构件 6铰链连接为A002、构件7与构件8铰链连接为A000、构件9与构件10铰链连接为A003。
并联机器人设计一般要求MD个主动副位于同一平台或尽可能靠近同一平台,实现主运动副的运动,由于六个并联支链结构相同,其拓扑结构上的第五个平行四边形顶端6个球副S7、S8、S9、S10、S11、S12安装在同一刚性构件动平台 13上,可使动平台13绕轴线转动,静平台上的6个球副S1、S2、S3、S4、S5、S6均为主动副,机构简图如图1(c)所示。
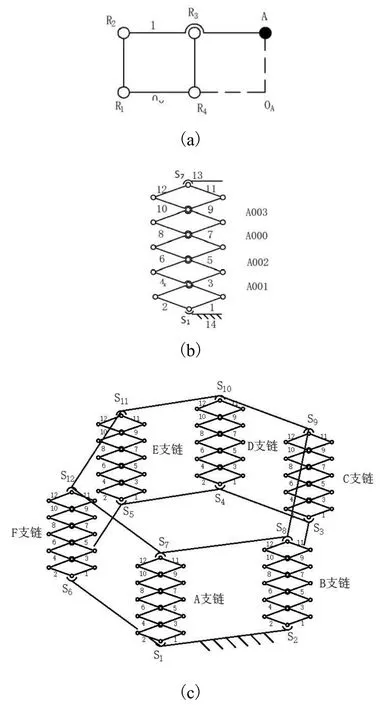
图1 六自由度并联机构拓扑结构图
1.2 三维建模
1) 三维建模
并联机构的参数化模型采用UGNX10.0软件三维建模并装配,其结构如图2所示。UG建模采用自底向上装配方式,预先设计好部件几何模型,再将模型添加到装配中,通过创建连杆,定义固定连杆,添加运动副,添加驱动,创建解算方案,解算,查看UGNX 10.0运动仿真曲线和动画,对并联机构运动参数位移、速度、加速度曲线进行分析。利用建模模块绘制所需零件,参数化设计 4R平行四边形机构连杆长度分别为200 mm和100 mm,静、动平台直径均为Φ2000 mm。新建一个asm文件,将上述的构件通过接触对齐自动判断中心轴,和首选接触装配在一起,并将静平台设置为固定连杆(勾选固定状态)。点击应用模块中的运动。在运动导航器右击asm文件,新建仿真文件,定义连杆,各支链构件之间采用旋转副。
2) 驱动方式
UGNX10.0环境中,在给定的六个并联支链中,通过与静平台连接的每个并联支链中第一个平行四边形机构的杆1、杆2设置旋转副旋转,等价于球副S1、S2、S3、S4、S5、S6均为主动副,在速度一栏设定自给的参数,依次单击工具栏上的环境方案和求解,设置步数200和时间20.3 s,完成后点击求解,点击动画,点击播放。UG仿真并联机构运动过程如图2所示。
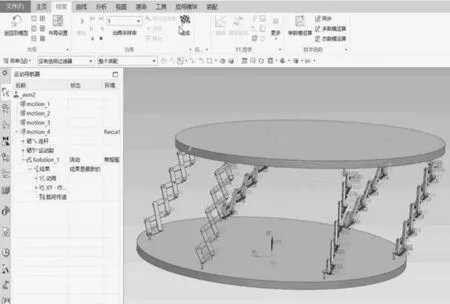
图2 3T-3R并联机构仿真动画
2 分析
2.1 并联机构动平台位移、速度、加速度曲线
并联机构的运动仿真 选择基于时间的机构动态仿真。定义时间为 0.56 s,内分200步,即每步为0.0028 s分析的情况,进入UG解算过程,系统会自动模拟并联机构运动的全过程。仿真结束后,可以通过图形的形式输出动平台的运动情况,由所得的结果,可以对驱动件的设计进行优化和合理性评价。虽然并联机构的运动学正解求解起来非常复杂,但是利用UG软件分析,就能十分方便地获得运动学的仿真结果。动平台中心点特征值见表1,由表1可知,动平台从初始位置360 mm开始运动,升程120.3 mm,动平台作变速直线运动。
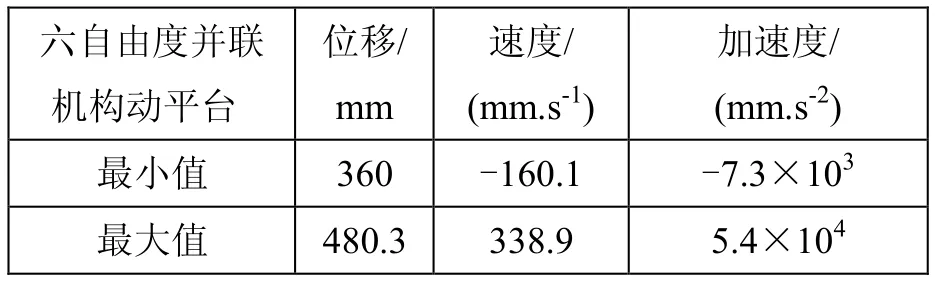
表1 动平台中心点位移、速度、加速度特征值
动平台中心点位移、速度、加速度曲线如图3所示。在0~0.38 s,动平台平移上升;0.38~0.51 s,动平台三维平移上升,速度下降,速度、加速度呈波动状态;0.51 s之后,动平台有奇异位置,开始翻转摇晃并快速倾倒。

图3 动平台中心点位移、速度、加速度曲线
2.2 并联支链位移曲线
并联支链设计以并联支链的运动空间为基础,建立并联支链运动学模型。A支链、B支链、C支链、D支链、E支链、F支链的位移曲线如图4所示,其中D支链和F支链的位移基本重合;A支链和C支链的位移基本重合;B支链和E支链的位移有稍微相差。对单个支链其拓扑结构—6个并联支链位移,在0.56 s最大差值为19 mm,在0.38 s最大差值为7.6 mm,表明各并联支链分别在A000、B000、C000、D000、E000、F000铰副定点转动时的拓扑特征以及存在空间三维移动,由此可得动平台输出运动在空间为3平移和3转动共6个运动自由度具有准确性和平稳性。

图4 UG仿真六个并联支链位移曲线
3 结语
(1)创新设计了一种机械结构由静平台、动平台、连接静平台与动平台的六个并联支链组成,其中每个支链均由五个平行四边形机构串联组合成伸缩链,并联机构中六个并联支链空间互相平行,其中每个支链中的第一个平行四边形顶端均分别与静平台S球副轴连接,每个支链中的第五个平行四边形顶端均分别与动平台S球副轴连接,形成3T-3R六自由度并联机构。
(2)在进行设计的初级阶段,通过采用平行四边形结构形式和铰副配置后,由UG仿真实现并联机构结构自动分析,根据六自由度并联机构运动特性,可以快速有效地得到并联机构动平台各种参数、所有的拓扑特征及存在性,有效地缩短设计周期,研究结果为并联机构的控制提供了必要的依据。
