模糊PID控制应用于液压同步控制系统的研究
2020-04-15叶海平
叶海平
模糊PID控制应用于液压同步控制系统的研究
叶海平
(漳州职业技术学院机械工程学院,福建,漳州 363000)
液压同步控制系统工程机械中受到广泛地应用。液压同步控制系统具有非线性、参数时变、大惯性、迟滞系统等特性。模糊控制算法对控制对象具有很好的逼近作用。将模糊控制理论应用到PID控制中,提高PID控制器的控制能力。将模糊PID控制器应用到液压同步控制系统中,进一步提高液压同步控制系统的动态和系统稳定性。利用MatLab软件对液压同步系统进行建模和仿真实验。仿真结果表明基于模糊PID控制的液压同步控制系统具有很好的动态性能和系统稳态性。
同步回路;模糊控制;液压控制;PID控制器
0 引言
PID控制器由于操作简单、灵活等特性,广泛应用于液压同步控制系统中,实现执行装置的同步运行。随着智能制造技术的迅猛发展,在一些智能的工程机械中,对同步控制系统提出了更高的要求,传统的PID控制已经不能满足智能工程机器发展的需求[1-2]。
模糊控制是模糊数学同控制理论相结合的产物。模糊控制是基于模糊推理,模仿人的思维方式, 对难以建立精确数学模型的对象实施的一种控制。因此,模糊控制对工业智能控制具有举足轻重的作用。PID控制器由于其操作方便、灵活控制等特性,被广泛应用到工业中,包括液压同步系统。但是PID控制液压同步时,具有一定的迟滞,不能迅速做出响应,响度速度达不到要求。目前模糊控制已经广泛应用到工业领域,如刘文秀等[3]将模糊控制应用到配料称重系统,陈佳林等[4]将模糊PID应用到磨削机床伺服电机控制。而将模糊PID控制器应用到液压同步控制系统的研究相对较少。
1 液压同步控制系统设计
液压同步控制系统,就是由几个液压马达作为执行装置,机器在运行过程中需要若干个液压马达才能实现同步运行。双缸锻造液压机同步控制系统工作原理如图1所示。图中活动横梁作用于锻件,要求施加在锻件上的压力必须要均匀,这就对两液压缸的运动同步提出了很高的要求。活动横梁两侧的光栅尺用于测量横梁位置,反馈给同步控制器,同步控制器根据位置差,使用控制算法得到控制量,经D/A转换后用于控制液压阀阀芯运动,使运动慢的油缸补充油液而运动快的油缸减少油液,从而使两液压缸的运动趋于同步[3]。
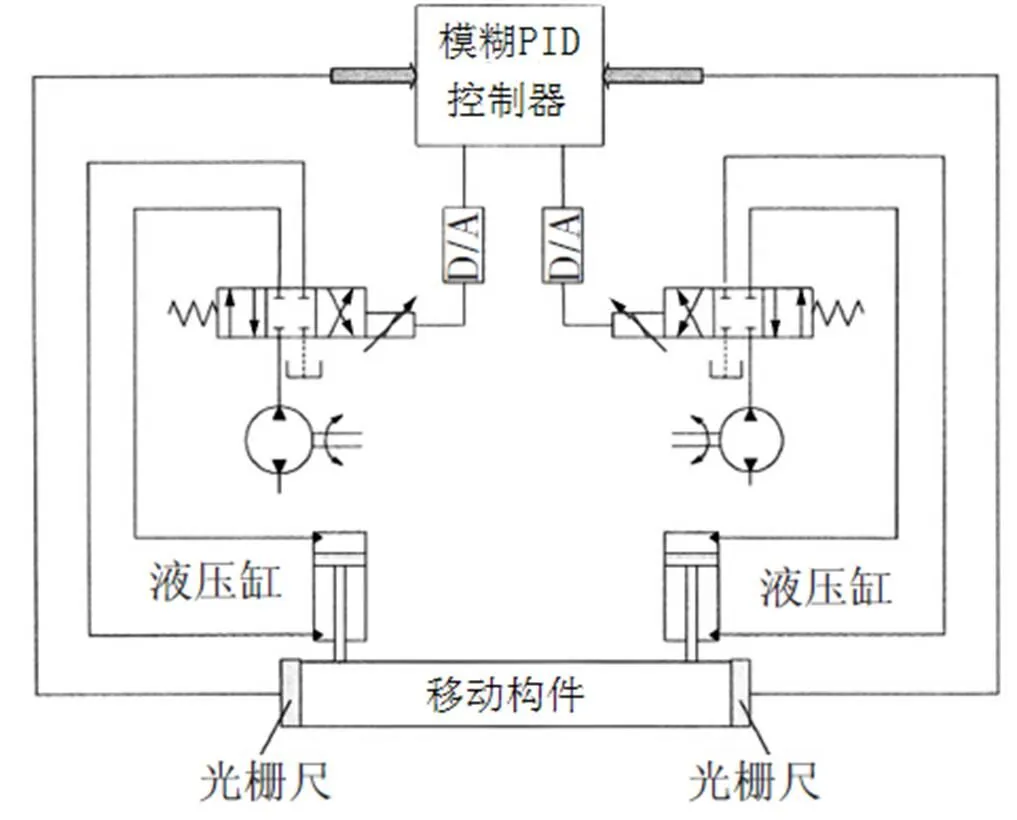
图1 双缸液压机同步控制原理
2 模糊自整定PID控制器的设计
将模糊控制应用到PID控制当中,使得智能控制系统的整体性能大大提升,进一步满足智能制造发展的需要。PID控制的参数包括比例环节、积分环节和微分环节。模糊控制就是对这三个参数进行模糊化处理、模糊化运算和模糊化判决,最终输出变量去修正PID控制器,使得智能控制系统更高效稳定地运行,模糊化的PID控制器再进一步地控制液压同步系统,保障液压同步系统的动态和系统稳定性。
2.1 模糊化计算
模糊控制包括模糊化处理、模糊控制运算和模糊判决三个环节,输入的两个参数为系统误差E和误差变量率,输出为PID控制器的修正参数为。根据模糊分割理论,确定分割数为{NB,NM,NS,Z,PS,PM,PB}。输入变量系统误差和系统误差率的论域为{-4,-2,-1,0,1,2 ,4},输入变量的论域为{-4,-2,-1 ,0,1,2 ,4}。隶属函数是对模糊概念的定量描述,常用的有高斯幻术、三角函数、S形函数等。三角隶属函数具有结构简单、计算工作量小、精度高等特点。本控制变量的隶属度曲线选择用三角形函数来描述,输入变量的隶属度函数曲线如图2所示,输出变量的隶属度函数曲线如图3所示[4-5]。
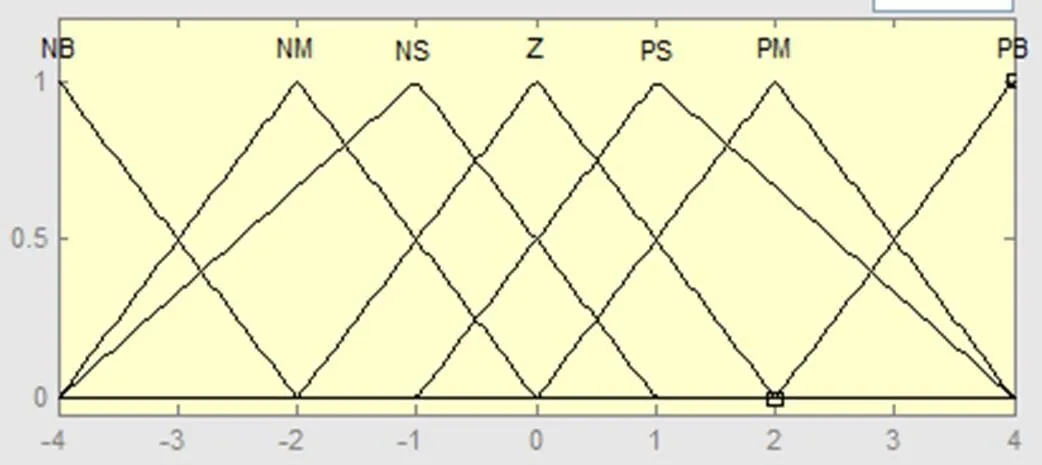
图2 E和Ec的隶属度函数曲线
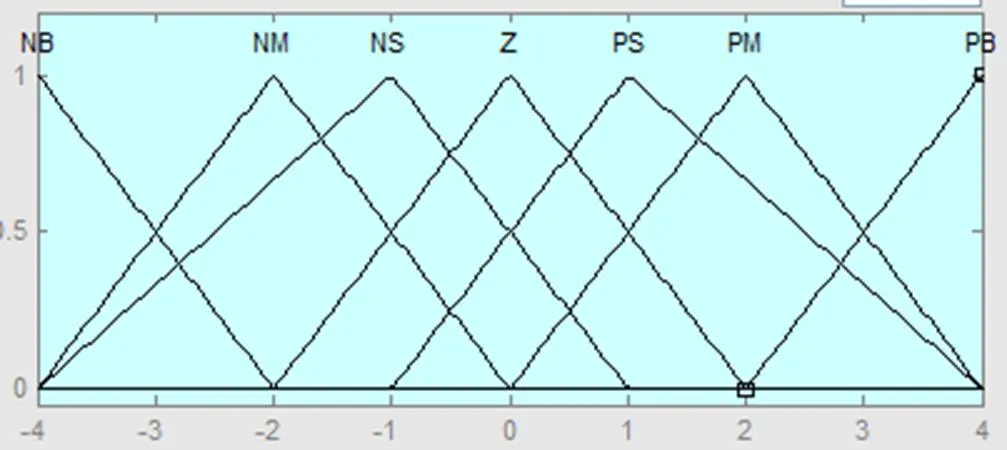
图3 ΔKp、ΔKi和ΔKd的隶属度函数曲线
2.2 建立模糊规则表
根据PID控制器的工作原理、比例系数、积分环节和微分环节在控制系统中的主要作用和影响,在不同的和时,被控过程对参数和的调整规则如下所示:
1)当较大时,通常通过调大的值和调小的值,来加快控制系统的响应速度;为了防止控制系统在运行中出现较大的超调,需要对积分值加以控制,必要时取为零。
2)当和的值相对适中的时候,为了避免出现太大超调,通常把比例系数和积分系数的值调小;此时,因为微分系数对系统响应影响较大,一般取值适中。
3)当的值较小时,为保障系统具有良好的稳态性能,可以考虑调大比例系数和积分系数;同时,为了防止控制系统在设定值附近出现振荡,考虑到系统的抗干扰能力,比例系数的值要根据的值来调整,当值小时,调大,反之,调小。
根据上面PID控制参数的调整规则,结合专家实际控制过程中的宝贵经验,可以设计出PID控制变量三个参数的控制规则如表1、表2 和表3 所示[6-7]。
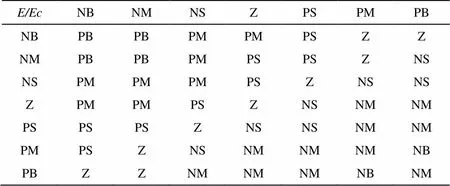
表1 Kp控制规则表

表2 Ki控制规则表

表3 Kd控制规则表
模糊控制器的3个参数的表达式为


(3)
为3个参数的初值,{}{}{}为模糊控制表中的修正值。本文PID控制算式为:

2.3 用模糊控制实现PID自整定
通过以上设计步骤,将模糊控制应用到PID控制器当中,形成模糊PID控制器,提高了控制系统的整体性能;并用它来控制液压同步系统,提高液压同步系统的整体性能[9]。控制的原理图如图4所示。
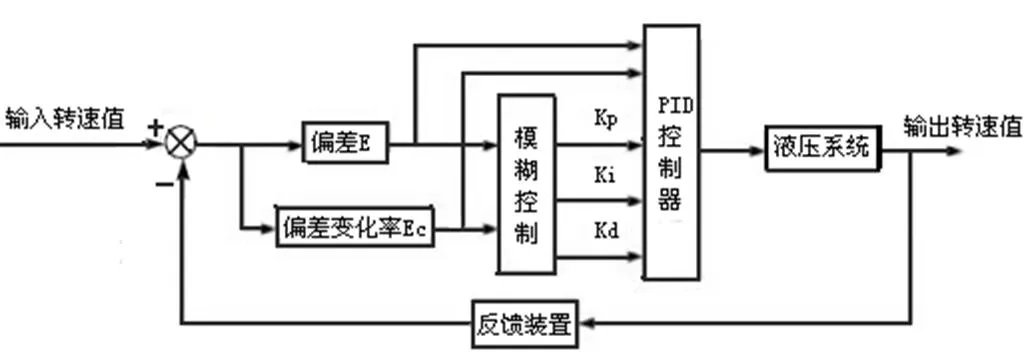
图4 模糊PID液压同步控制器原理图
3 将模糊自整定PID 控制应用到液压控制系统中进行仿真
为了验证模糊PID控制器的优越性,选取某双缸锻造液压机液压同步控制系统为研究对象。根据液压系统参数和传递函数公式,确定其传递函数为:
利用MATLAB/Simulink建立系统的液压系统模型和控制系统模型。在 MATLAB/Simulink 中,液压系统模型转化为一个s-function[10],通过两个软件的接口将液压系统模型导入Simulink中,与Simulink中搭建的控制系统模型进行联合仿真[11-12]。
根据模糊PID控制器和液压同步系统的工作原理,在Matlab软件的Simulink里面构建模糊控制器,进而将整个液压同步系统的控制过程构建出来,同时也将普通PID控制液压同步系统构建出来,如图5所示。两者在仿真过程中所有参数的值都是参数和的数值范围为(0,20),初始PID参数值均为:= 0.2,= 0.1,= 0.5。然后将仿真结果进行比较,模糊PID控制液压同步系统和PID控制液压同步系统的仿真结果如图6所示和图7所示[13-14]。
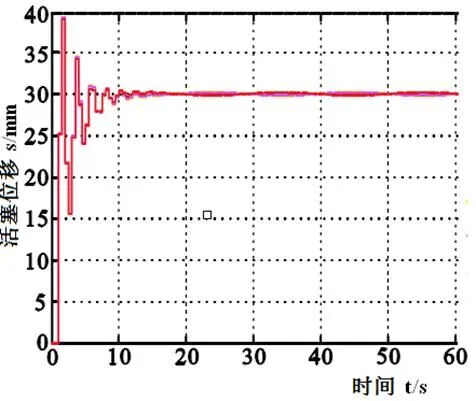
图6 PID控制方式下液压缸活塞运动图
Figure 6 Piston motion diagram of hydraulic cylinder under PID control mode

图7 模糊PID控制方式下液压缸活塞运动图
Figure 7 Piston motion diagram of hydraulic cylinder under fuzzy PID control mode
通过仿真结果曲线图可以看到,采用模糊 PID 控制方式以后,两个液压缸活塞的位移的超调量都明显减小,位移稳定后随负载波动的最大幅值降为0.20 mm相比PID 控制位移的同步精度有了明显提高。可见,模糊 PID 控制的控制效果最好,降低了位移的超调量和波动的程度,提高了同步精度,相比PID控制其具有更强的适应性和鲁棒性。
4 结论
将模糊控制应用到PID控制当中,提高PID控制器的性能,形成模糊PID控制器;将它应用到液压同步系统,提高液压同步系统的整体性能。在Matlab软件里,对模糊PID控制液压同步系统和PID控制液压同步系统进行建模仿真。通过仿真结果,验证模糊PID液压同步系统的响应速度更快,超调量更小,整体性能更好。
[1] 潘荣安,杜文正. 起重臂动态面自适应模糊滑模控制联合仿真研究[J].液压与气动,2018(10):92-97.
[2] 曲曰阳,盛桂敏,李成凤. 基于液压驱动电液缸伺服控制系统研究[J].液压气动与密封,2018,38(4):74-77.
[3] 刘文秀,郭伟.PLC配料称重系统的模糊自适应控制[J].沈阳工业大学学报,2018,40 (6):676-681.
[4] 陈佳林,闫如忠,陈冰冰. 基于模糊PID的磨削机床伺服电机控制研究[J].组合机床与自动化加工技术,2018, (11):51-53.
[5] 王会峰,赵雪丹,胡敏芳,等. 混合模糊PID 的半微量相平衡反应控制仪[J].控制工程,2017,24(5):1079-1085.
[6] 傅思萍. 改进遗传算法优化自动组卷技术的研究[J].金陵科技学院学报,2015,31(3):56 -62.
[7] Saad K,Taher E,Siegfried H. Motion synchronization enhancement of hydraulic servo cylinders for mould oscillation[J]. International Journal of Fluid Power, 2012, 13(1): 1-6.
[8] 潘荣安,杜文正. 起重臂动态面自适应模糊滑模控制联合仿真研究[J].液压与气动,2018(10):92-97.
[9] 杨西萍,魏孔财. 4台液压马达驱动的海洋钻井支撑转盘研制[J].机械研究与应用,2013, 26(3): 114-116 .
[10] 谢金辉,唐国元,黄道敏,等. 双马达同步驱动位置伺服系统建模与仿真优化[J].机械与电子, 2013(1): 22-27.
[11] 毛尾,纪朱珂,韦海利,等. 电液比例伺服系统模糊PID复合控制应用研究[J].液压与气动,2019(1):95-99.
[12] 丁海港,张鹤,赵继云,等. 阀-泵并联变模式液压调速系统设计与实验研究[J].液压与气动,2018(12): 15-18.
[13] 谈衡,单文桃. 并联状态流-压互补同步回路仿真[J].液压与气动,2017(7):43-49.
[14] 胡浩东,李炳文,戴本圣. 新型同步控制回路设计与分析[J].机床与液压,2016, 44(14):67-70.
Application of Fuzzy-PID Control in Hydraulic Synchronization Control System
YE Hai-ping
(College of Mechanical Engineering,ZhangZhou Institute of Technology Zhangzhou, Fujian 363000, China)
Hydraulic synchronous control system is widely used in construction machinery. There are nonlinearity, time-varying parameters, large inertia and hysteresis in Hydraulic synchronous control system. The fuzzy control algorithm has a good approximation to the control object. The fuzzy control theory is applied to the PID control to improve the control ability of the PID controller. The fuzzy PID controller is applied to the hydraulic synchronous control system to further improve the dynamic and system stability of the hydraulic synchronous control system. The hydraulic synchronization system is modeled and simulated by MATLAB software. The simulation results show that based on fuzzy PID control, the hydraulic synchronous control system has good dynamic performance and system stability.
synchronization loop; fuzzy control; hydraulic control; PID controller
1674-8085(2020)01-0075-07
TH16/TP27
A
10.3969/j.issn.1674-8085.2020.01.014
2019-06-20;
2019-09-10
福建省中青年教师教育科研基金项目(JAT160872)
叶海平(1982-),男,福建漳州人,讲师,硕士,主要从事数控技术和液压技术方面的科研和教学工作(E-mail:44002326@qq.com).
