一种稳健的雷达目标跟踪滤波算法研究
2020-04-13张思霈刘红明
张思霈,刘红明,余 科,罗 晨,郁 文
(上海机电工程研究所,上海 201109)
0 引 言
维纳(Wiener)滤波理论开创了现代雷达滤波理论研究领域,卡尔曼(Kalman)等人将状态变量分析方法引入,突破了维纳滤波的局限性,利于计算机求解,且它们都是数字滤波,对提升精密跟踪雷达的跟踪稳定性和精度有重要的促进作用[1]。上述滤波器一般针对理想的高斯噪声环境进行设计。实际存在的很多噪声都表现出非高斯特性,会导致滤波效果不理想甚至滤波发散[2]。这些噪声多来自于真实环境中出现的模型失准、目标机动、多目标交错、特定分布杂波和异常野值等,它们都会导致跟踪不稳和精度下降[3]。
针对上述问题,部分学者开展了相关研究,研究主题包括对跟踪滤波算法做稳健性改进和增加剔除异常野值的措施等。经典的雷达目标跟踪稳健滤波算法有基于改进的Masreliez方法的卡尔曼滤波[4]、变步长的改进无迹卡尔曼滤波算法[5]等。这些算法复杂度较高,且主要针对模型不够精确或存在偏差时导致的滤波稳健性下降的问题,能够适应目标机动情况。在杂波环境下,文献[6]基于交互多模型目标跟踪算法和概率数据关联算法,提出一种改进的自适应关联门目标跟踪方法。该方法利用目标假设运动模式与真实运动模式之间的误差对确定关联门大小的新息协方差进行修正,从而能在目标做机动时扩大关联门,实现对目标的稳定跟踪。该算法计算复杂度较高,且主要针对目标在杂波环境下的机动情况,但在自适应扩大关联门时所做的“目标以最大机动水平进行机动”的假设不符合实际情况。文献[7]提出了一种针对机动目标跟踪滤波过程的抗野值算法,利用新息及其方差判别和剔除野值,并在剔野之后采用最小二乘法估计目标状态,提高了扩展卡尔曼滤波的稳定性和精度。文献[8]在最小二乘估计野值剔除算法的基础上做改进,提出了一种计算量较小、满足实时性要求且较为通用的自适应实时野值剔除算法。在众多实时剔野算法的研究中,基于Huber稳健估计自适应门限的五点线性预报法剔野效果相对最优,能够正确检测和剔除多种异常值,且虚警少,不足是其计算效率相对较低[10-11]。同时,上述两种自适应实时剔野算法存在共同的缺陷,即都只取最近5个数据点用于野值的判断和剔除,未将历史跟踪数据的稳定性成分纳入考量,使得门限更易出现不稳定的抖动,对于跟踪稳定性的提升较为有限。本文针对非高斯噪声环境或异常野值(尤其是多目标交错产生的异常值)的影响下出现的跟踪滤波不稳定问题,提出了一种基于残差迭代统计的关联门控制航迹滤波算法,利用当前以及历史时刻的残差数据控制门限,对航迹中的异常值进行了动态实时的抑制和剔除,提高了目标航迹跟踪滤波回路的精准性和稳健性。
2 常用的跟踪滤波算法
2.1 经典的滤波模型
目前较为广泛应用的线性滤波理论包括维纳滤波、卡尔曼滤波、α-β 滤波以及α-β-γ 滤波。经典的卡尔曼滤波收敛至稳态时转化为α-β滤波器。它们都建立在状态滤波模型的基础上,故此处对α-β滤波模型进行说明。α-β滤波主要包括一步预测和状态值更新两个部分。
目标状态值的一步预测可表示为

状态值的更新表示为


式中:Z(i+1)为当前时刻的实际观测值;H(i+1)为观测矩阵。观测向量Z(i+1)=(i+1)(i+1),i+1)]T包括三个分量在i+1时刻的观测值。观测
已有研究结果表明,量测噪声为高斯独立情况下,由于预测值和观测值在时间上差1个快拍,两者相互独立,上述残差也是白色高斯过程;同时工程实测数据的分析表明,跟踪回路残差信息能较好地反应目标跟踪回路的稳定性和目标机动情况下的动态滞后效果。立足残差数据的统计、分析或逻辑判断处理,实现对异常野值或其它非理想噪声成分的剔除或抑制处理,提高目标跟踪回路的稳定性,是较为有效的技术途径。
2.2 自适应门限滤波算法
自适应门限滤波算法建立在残差数据的滑窗统计基础上。它根据Huber稳健估计原理,实时地确定检测门限,实现实时剔野的稳定跟踪滤波[12]。其核心是自适应门限的求解,门限求解主要分为残差计算、判断筛除和门限求解3个部分。
1)残差计算:计算t(t=1,2,…,N)时刻长度为n的时间窗内,残差向量Δyi=yi-,i=1,2,…,n。其中,yi=(i)]T=i|i-1)|i-1i|i-1)]T。
2)判断筛除:判断残差是否满足|Δyi(j)|≤CHσ(Δyi(j)为Δyi中第j个维度的分量),若满足,则Δyi(j)为正常值;否则,为异常值,剔除后用CHσ代替。其中:CH为调节系数,用于调整预设门限;σ为误差标准差。
3)门限求解:将经过判断筛选后的残差值用于计算当前时间窗的精度估值,进而乘以设定好的比例系数形成自适应门限。
该算法门限的自适应性来自于实时滑窗统计的残差,而残差与精度存在一定的比值关系[1]。算法考虑到了跟踪数据中存在异常值时残差与精度的关系严重偏离的情况,并保证了在这样的情况下,也有较为可靠的误差方差估计值。采用的Huber估值理论估计均方差表示为

该算法中,Huber估值理论中的运算处理方式对异常值起到了限幅作用,使得门限缩小的同时,可能会剔除一些正常值,影响最终滤波结果的稳定性提升;另外,增加了若干个时间窗的数据存储量和方差统计计算量,降低了计算效率。
3 基于残差迭代统计门限的稳健滤波算法
与对比算法类似,本文算法来源于对雷达目标跟踪数据的残差统计特性的分析。残差统计的结果与滤波过程所处环境中的噪声存在一定的联系。
1)跟踪滤波中的噪声分布特性
如前文所述,在理想的高斯噪声环境中,滤波过程的残差值与观测误差一致,仍然呈现高斯分布,即

式中:Δy是残差,σc为统计残差的标准差。
为研究分析目标跟踪数据的残差表现出的分布特性,以某型精密跟踪雷达目标跟踪数据的方位维残差统计为例,求得其残差分布中具有代表性的一组统计结果,如图1所示。由图1可知,其总体上虽呈现大致的高斯特性,但仍存在一定的非理想拖尾和杂散成分,主要体现在方位维的跟踪数据以及其不同于高斯噪声的时域分布特征。
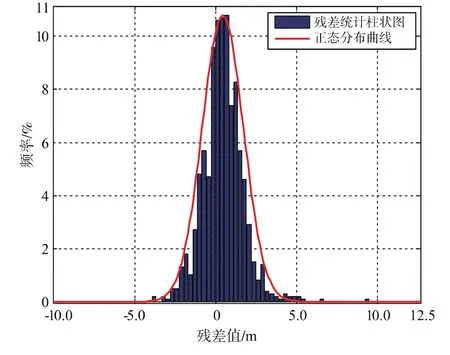
图1 高斯噪声环境下某雷达距离维残差统计分布Fig.1 Distance residual statistics distribution of a radar in Gaussian noise environment
在理想白噪声条件下,残差值大于3倍残差标准差的概率是较低的。理论上,可用δi表示统计残差的标准差σc的第i时刻估计,则近似有
式中:|ξh|是残差门限值;当|ξh|取值为3σc、5σc时,概率分 别为 0.001 3、0.000 7,超 出 门 限 的 概率较低。
在这种条件下,确定一种固定的关联门限,门限与估计精度的比例取适当的值,则跟踪数据残差超出门限的概率较低,且一旦有超过门限的异常野值即对其进行剔野处理。
若是非高斯噪声或在特定的杂波环境中,残差分布不再呈现理想的高斯特性(高斯性类似于或劣于图1),如图2、图3所示(图3从分布的形状上粗略分析,可能是α值小于1的α稳定分布)。此时若仍采用固定门限,则有的正常数据可能被误剔除,这将对滤波过程的稳定性造成影响。此时可采用跟随残差同步变化的自适应关联门限,利用残差大小控制关联门限的大小,剔除或抑制非理想的噪声和异常野值,同时保留正常值,提高目标跟踪滤波的稳健性。
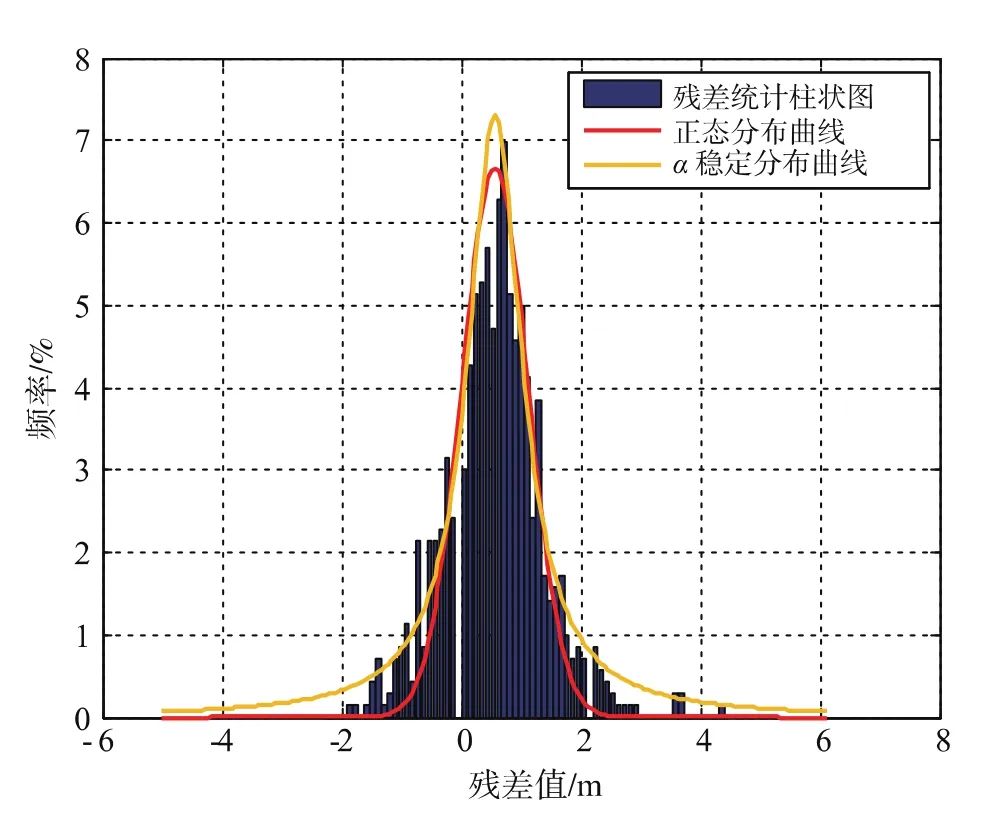
图2 非高斯噪声环境下某雷达距离维残差统计分布Fig.2 Distance residual statistics distribution of a radar in non-Gaussian noise environment
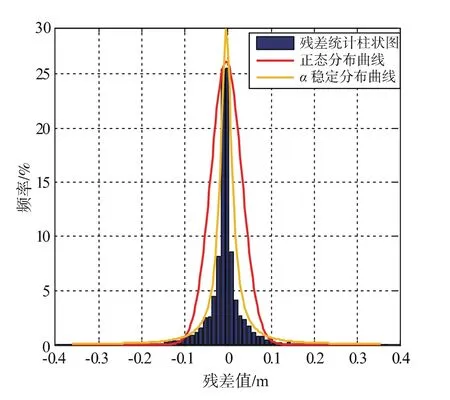
图3 非高斯噪声环境下某雷达方位维残差统计分布Fig.3 Azimuth residual statistics distribution of a radar in non-Gaussian noise environment
2)算法过程步骤
本文算法与对比算法的思路相似,基于残差分布的统计,利用精度本身自适应调节关联门大小,抑制噪声和野值等的影响。最核心的步骤同样是关联门的计算。关联门求解过程如下。
a)计算出从1到k时刻的单维度残差值Δyi(j)(计算方式同对比算法计算方式)。
再将单点的残差进行迭代统计计算,迭代计算公式为

式中:Δi为当前时刻的残差迭代计算结果,也是后续用于产生控制门限的值;α为调整系数,用于决定历史时刻的残差成分占最终统计结果的比例。
由统计理论可知,经过以上迭代处理所得的残差值,其内涵与残差的均方根统计结果是一致的,同时兼顾了残差的实时性。
b)利用以上求得的残差统计值,乘以预先设置的比例系数k(k的值取决于残差分布的高斯特性),得到关联门限(以角度门限Tθ为例)为

式中,比例系数k的选取需根据正态分布理论对所处理的该段航迹进行正态性检验,或根据相似条件下航迹的历史正态性检验结果分析计算求得。
由相关理论可知,稳定、高质量的航迹,其残差应为或趋于正态分布。因此,由正态分布理论的3σ原则,若将门限取为3σi(此处σi即为上文中的Δi,即取k值为3),那么在同一批航迹数据中,非异常值和跳变野值等的残差数据中的99.45%都在门限内。此时,该关联门的设置是比较合理的。实际应用中,k值可根据滤波的需求和数据的真实特征做出一些调整,但其基本的求取目的是不变的,即为了提高滤波后航迹的稳定性和精度。
c)为保证算法的稳健性,避免关联门在目标机动或受干扰时变得过大,导致无法剔除异常野值,需要在式(8)基础上设置一个最大门限Tmax;同时为避免关联门过小而引起的有效、正确点迹被剔除,还需设置一个基础最小门限Tmin。
d)求得关联门后,据其对后续送达的目标点迹数据进行关联操作,在门限范围内的数据进入滤波器正常滤波输出;超出门限的数据(基本上都是杂波、干扰等导致的异常数据)则被剔除,并利用上一时刻的输出数据做一次外推计算来求得当前时刻的输出。由此获得的输出便是本文方法对当前时刻点迹的实时抑噪滤波输出值。
由此可得整个滤波算法的流程如图4所示。

图4 基于残差统计的抑噪滤波跟踪算法流程框图Fig.4 Flow chart of the noise-restraint filtering tracking algorithm based on residual statistics
不同于对比算法,本文算法利用了从历史时刻到当前时刻的所有残差数据的迭代统计结果,能够较好地反映航迹的整体平均稳定性。同时,本文算法在残差统计过程中并无残差的限幅筛选处理,故本文算法对门限控制的灵敏度以及稳定性的提升效果更优。另外,由于本文算法每一时刻的残差仅需一步迭代即可求得,且只存储上一时刻的残差统计数据,因此本文算法的计算效率高于对比算法的计算效率。
4 仿真结果及其分析
为了验证普通经典滤波算法(算法1)和自适应门限滤波算法(算法2)和本文算法(算法3)的效果,进行了3组仿真验证试验。设定仿真验证场景如下:目标在三维空间中做一个初速度为零的匀加速直线运动,vx0=vy0=vz0=0,ax=2m/s2,ay=1m/s2,az=1.5m/s2,x、y、z3个方向上的运动相互独立。在此运动模型建立的真实航迹上加入高斯白噪声,同时加入一定的独立和连续野值,模拟真实的雷达跟踪噪声环境,将其作为目标的雷达观测值,观测周期T=1 s。进行50次蒙特卡罗仿真试验。
1)仿真1:算法滤波效果对比
选取其中目标y向的轨迹,其航迹的真值和观测值的对比如图5所示。
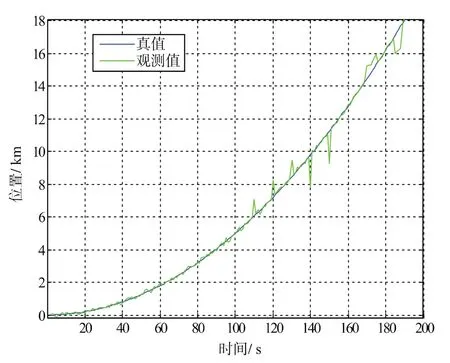
图5 目标真值和观测值对比图(y方向)Fig.5 Comparison of target’s truth value and observed value(y-direction)
图6是对该目标航迹采用经典滤波算法和本文算法的对比结果,图7是采用本文算法和自适应门限滤波算法的对比结果。
由图6可以看出,在使用本文算法后,航迹值不会再受各种噪声和野值因素的影响而偏离真值方向;而采用经典滤波算法,滤波结果仍会向异常值偏离。利用残差控制距离、角度的关联门能够成功减小噪声和异常值的影响,验证了该算法的有效性。同时,从图7看出,本文算法相较于自适应门限算法的抑噪、剔野能力更强,滤波输出值更接近目标真值,不存在偏向噪点和野值的趋势,即滤波效果更优。
2)仿真2:比例系数k的选取。考察关联门大小和残差值的比例系数k对于本文算法滤波结果的影响,仿真时选取不同的系数k,得到对应的均方根误差(root mean square error,RMSE)结果如表1所示。
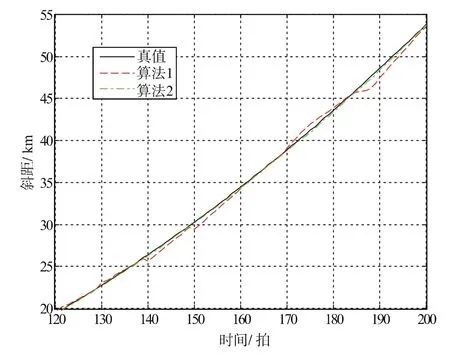
图6 本文算法和经典滤波算法结果对比图Fig.6 Comparison of the outcome between the proposed algorithm and classic algorithm
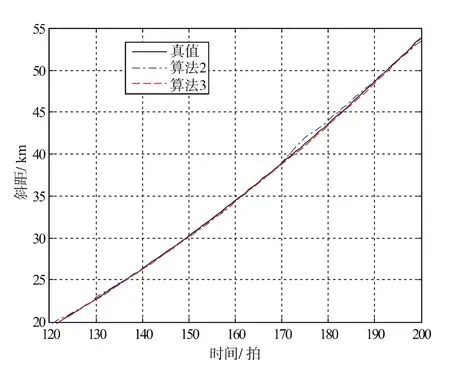
图7 本文方法和自适应门限方法的滤波结果对比图Fig.7 Comparison of the outcome between the proposed algorithm and adaptive threshold algorithm

表1 不同比例系数k的RMSE对比结果Tab.1 Comparison of RMSE with different proportional coefficient k
从表1可以看出,比例系数k为5时各个维度的RMSE综合评价是最好的。而当k=2时,斜距RMSE过大的原因是关联门过小而导致航迹点外推之后,下一个探测点迹仍然无法在关联门内,一段时间的迭代和持续外推导致了滤波的发散。
3)仿真3:滤波精度和算法复杂度的综合对比。图8和表2反映了普通的经典滤波、自适应门限滤波以及本文的残差统计门限滤波算法3个维度的误差以及算法运行时间对比结果。
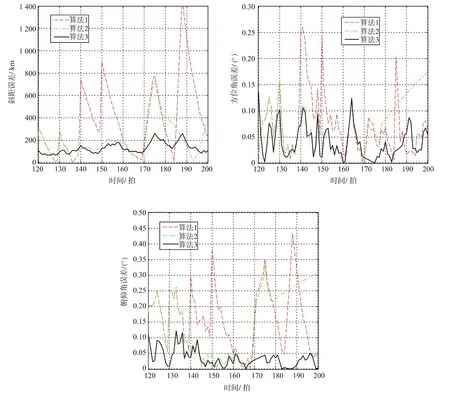
图8 3种算法的滤波误差对比Fig.8 Comparison of filtering errors between 3algorithms

表2 3种算法滤波的RMSE和运行时间对比结果Tab.2 Comparison results on RMSE and running time of 3algorithms
由表2和图8可以看出,本文算法在滤波的效果上要明显优于其余二者,距离精度相较于算法2提升了60.2%,方位精度相较于算法2提升了1.7%,俯仰精度相较于算法2提升了27.9%。同时,3个维度的精度相较于算法1分别提升了72.1%、36.6%和49.4%。而在算法效率上,从运行时间来看,本文算法和算法2相近,同时其计算复杂度也没有比经典滤波算法的计算复杂度高出很多,因此可以较好地运用于工程中。
5 结束语
本文利用基于残差统计的目标跟踪点迹关联门限,实时地抑制了雷达目标跟踪数据中的噪声和野值,之后再进行闭环的目标跟踪滤波,仿真结果表明跟踪精度得到了提高。本文方法在计算复杂度相近的情况下,相比于自适应门限跟踪滤波算法,在精度改善和稳定性提升的效果上有一定的优势,且本文方法简洁快速,易于工程实现,有较好的潜在应用价值,稍加改进便可发挥出提升雷达目标跟踪的稳健性和改善精度的作用。
