基于遗传算法的自动驾驶仪参数多目标优化研究
2020-04-13施振兴管再升施臣钢
施振兴,管再升,王 磊,施臣钢,伍 彬
(上海机电工程研究所,上海 201109)
0 引 言
自动驾驶仪是制导控制系统弹上设备的主要组成部分[1],对导弹的稳定控制具有重要意义[2]。经典两回路过载自动驾驶仪,一般采用角速率陀螺和线加速度计[3],该类型自动驾驶仪广泛应用在指令制导和寻的制导系统中[4]。根据防空导弹的任务需求特点,其自动驾驶仪不仅需要确保系统的稳定性,而且要求对制导指令具备较快的响应速度[3]。因此,对防空导弹两回路过载自动驾驶仪的参数设计方法进行研究具有一定的工程指导意义。
现有相关研究中,自动驾驶仪参数设计方法主要有两类:一是根轨迹法、标准系数法和解析法等经典设计方法[3-6];二是结合神经网络、模拟退火算法等的参数优化设计方法[7-9]。但在以上文献中,经典设计方法仅给出了设计初值,需在此基础上进行不断试凑调整,以满足驾驶仪各项指标;优化设计方法往往仅考虑单一优化目标,具有一定的局限性。因此,有必要对多约束条件下的自动驾驶仪参数快速优化设计方法进行深入研究。
本文以经典两回路过载自动驾驶仪作为研究对象,将自动驾驶仪设计参数解析解作为初值,以系统的相对稳定性作为约束条件,以系统响应的过渡过程作为优化目标,建立驾驶仪参数多目标优化模型,通过遗传算法对驾驶仪参数进行优化。
1 两回路过载自动驾驶仪模型
经典两回路过载自动驾驶仪结构框图如图1所示[3-4]。其中:ayc为导弹加速度指令;Kac为加速度计增益;Kg为陀螺增益;KA为加速度偏差增益;KACT为舵机增益;Ts为舵机时间常数;ξs为舵机阻尼系数;KDC是闭环增益调节系数;c是加速度计在导弹上的位置与质心之间的距离;ay为弹体加速度;δ为舵偏;为俯仰角速度;为俯仰角速度变化率。其中,KA和Kg为设计参数。
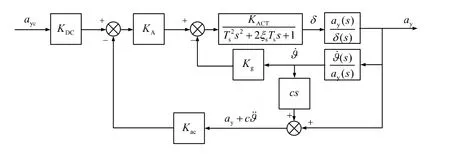
图1 经典两回路过载自动驾驶仪结构框图Fig.1 Structural block diagram of classical two-circuit overload autopilot
在进行理论设计时,由于舵机截止频率较高,可暂不考虑舵机系统的动力学特性[3],将舵机视作一个比例环节,则该经典两回路过载自动驾驶仪闭环传函为
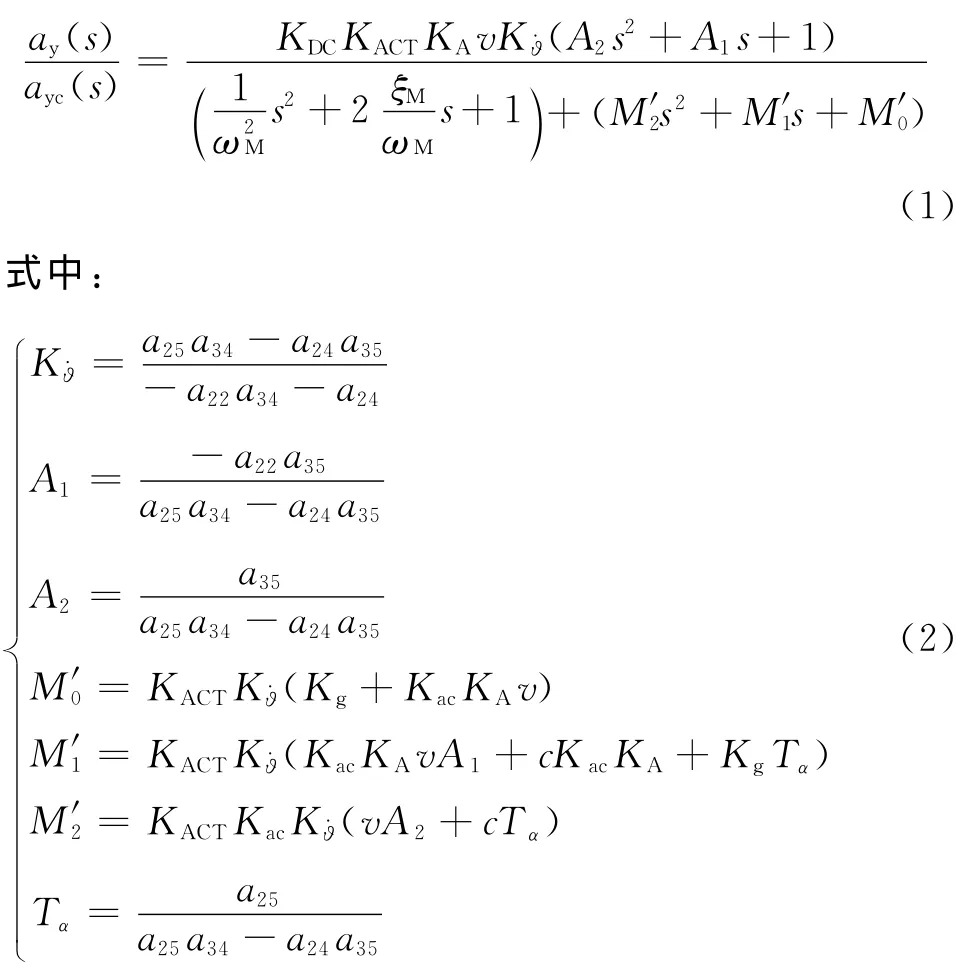
式中:a22为由俯仰角速度引起的俯仰阻尼力矩;a24为由攻角引起的俯仰力矩;a25为由升降舵引起的俯仰力矩;a34为由攻角引起的俯仰力;a35为由升降舵引起的俯仰力;v为导弹速度。
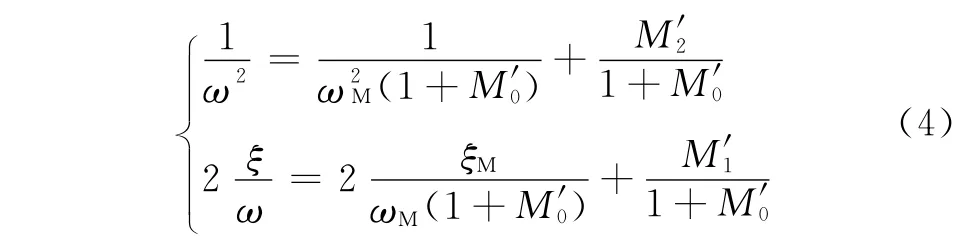
设驾驶仪期望特征方程需要满足

式中:ξM为弹体阻尼系数;ωM为弹体频率;ξ为驾驶仪阻尼系数;ω为驾驶仪二阶环节自振频率;ω与开环穿越频率ωCR之间存在对应关系[3],相当于间接引入了开环穿越频率指标ωCR。式(3)经过整理可得相应系数为
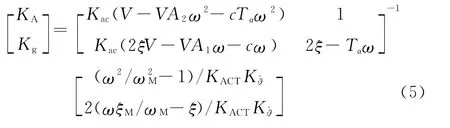
进而可以解得设计参数KA和Kg,其表达式为
闭环增益调节系数KDC是为了使自动驾驶仪跟踪加速度指令的响应稳态误差为零,其表达式为

2 优化模型建立
2.1 遗传算法
遗传算法是将优化问题类比为生物学上遗传问题的优胜劣汰。将需要优化的参数进行二进制转换,一个参数就是一条染色体。参数转换成二进制之后,每一位上的0或1就是基因,所在的位置就是基因座。染色体又可叫做基因型个体,这些基因型个体组成群体,在群体中的基因型个体数量就是群体规模。
类比到优化问题上,驾驶仪参数为需要优化的参数。通过二进制转换后,可形成一代包含若干个体的群体。驾驶仪参数优化的目标函数可视为个体的适应度的指标,通过优胜劣汰,选择能遗传到下一代的个体基因,进行交叉和变异,形成新一代的群体。本文遗传算法实现流程如图2所示。

图2 遗传算法实现流程Fig.2 Flowchart of genetic algorithm
1)生成初始群体
本文所研究的两回路过载自动驾驶仪设计参数为陀螺增益Kg、加速度偏差增益KA,以这两个设计参数的解析值作为初值,均匀地生成初始个体,进行二进制编码,生成初始群体。在种群规模上,若种群规模过小,容易形成近亲交配,较难生成具有竞争力的染色体;若种群规模太大,计算的时间会增长,且较难收敛。一般来说,种群规模20~100为宜。为使初始群体具有一定的基因多样性,本文选取种群规模为100。
2)计算适应值
对群体中的每一个个体计算适应值,适应度较高的个体有较高的概率能够遗传到下一代。对于要求目标函数f(x)得到最小值的优化问题来说,其适应度函数为

则某个个体能够遗传到下一代的概率表达式为

3)选择
根据适应值进行优胜劣汰,淘汰掉适应值低的个体,对适应值高的个体进行复制,并将这些个体放入交配缓冲池中。轮盘赌选择法能够较好地反映遗传概率,且能够在进行选择的同时保持个体的多样性,因此本文使用轮盘赌选择法进行选择。轮盘赌选择法每一次选择均为回放式,根据遗传概率可得每个个体被选中的期望值为

由期望值可知,个体适应度越高,其遗传概率越高,被选中的可能性也越大。通过选择,形成第k代父代。
4)交叉与变异
父代通过交叉和变异可以形成下一代个体。为了使通过交叉产生的下一代个体更好地继承父辈的特点,具有较好的适应度,本文使用算术交叉产生下一代个体,交叉模型为

式中,α为交叉参数,取α=0.8。由式(10)可知,算术交叉能够产生位于包含父辈的直线上的子辈,因此对父辈具有较好的继承性。
交叉是产生下一代个体的主要途径,而变异则是对交叉的补充。在遗传算法运算的过程中,往往可能因为选择或者交叉而降低群体的多样性。为了保证遗传算法的有效性,需要变异作为产生下一代个体的补充手段,以改善遗传算法的局部搜索能力并维持群体的多样性。
高斯变异能够在引导个体向群体最优点进化的同时避免陷入局部最优点,提高全局搜索能力[10],在各类优化模型中均有较广泛的应用。本文建立的遗传算法模型中,高斯变异第k代分布函数为
2.2 多目标优化模型
自动驾驶仪的主要作用是改善弹体动态特性,提高抗干扰能力以及精确、鲁棒地跟踪输入指令。本文主要关注其改善弹体动态特性的作用。动态特性指标通常为上升时间、峰值时间、调节时间以及超调量[11]。其中,超调量评价系统的阻尼程度,调节时间为响应速度和阻尼程度的综合指标。因此,本文将超调量和调节时间作为优化目标,目标函数为

式中:w1、w2为加权系数;ts为调节时间,σmax为超调量。
为排除各目标初值干扰并对权重进行归一化处理,推导可得各目标权重为

其中,ts0、σmax0分别为驾驶仪优化初值所对应的调节时间和最大超调量。
工程应用表明,相对稳定性会影响系统时域响应的性能[10],而相对稳定性在频域中以幅值裕度和相角裕度作为度量。因此,为保证自动驾驶仪时域响应的性能,本文的自动驾驶仪优化模型以幅值裕度和相位裕度不小于设计初值为约束条件。综上所述,本文所设计的两回路过载自动驾驶仪优化模型为

其中:KA0为加速度偏差增益优化初值;Kg0为陀螺增益优化初值;ts为调节时间;σmax为最大超调量;h(dB)为幅值裕度;h0(dB)为驾驶仪优化初值对应的系统幅值裕度;γ为相位裕度;γ0为驾驶仪优化初值对应的系统相位裕度。
3仿真分析
3.1 多目标优化仿真
本文以某正常式导弹的某一特征点为例进行仿真分析,该特征点动力系数如表1所示,弹上各硬件参数如表2所示。

表1 特征点动力系数Tab.1 Dynamic coefficient of characteristic point

表2 弹上硬件参数Tab.2 Parameters of hardwares on missile
设自动驾驶仪设计参数初值为阻尼系数ξs=0.7,开环穿越频率ωCR=45rad/s,则本文所设计的多目标优化模型目标函数图形如图3所示。
设遗传算法种群规模为100,最大进化代数为50代,遗传算法优化过程如图4所示。由图4可知,本文所设计的经典两回路过载自动驾驶仪多目标优化模型优化过程收敛,且收敛速度较快。驾驶仪参数优化结果如表3所示,驾驶仪对1m/s2的加速度指令的阶跃响应曲线如图5所示,优化前后系统对数频率特性曲线如图6所示。
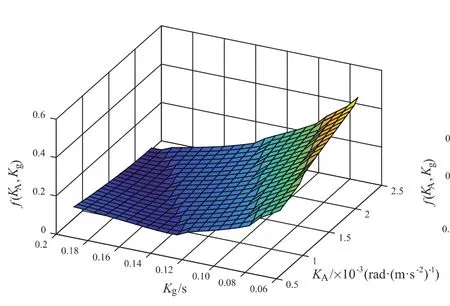
图3 多目标优化模型目标函数图形Fig.3 Objective function graph of multi-objective optimization

图4 遗传算法优化过程Fig.4 Genetic algorithm optimization process

表3 遗传算法优化结果Tab.3 Results of genetic algorithm optimization

图5优化前后自动驾驶仪阶跃响应曲线Fig.5 Step response curve of autopilot before and after optimization
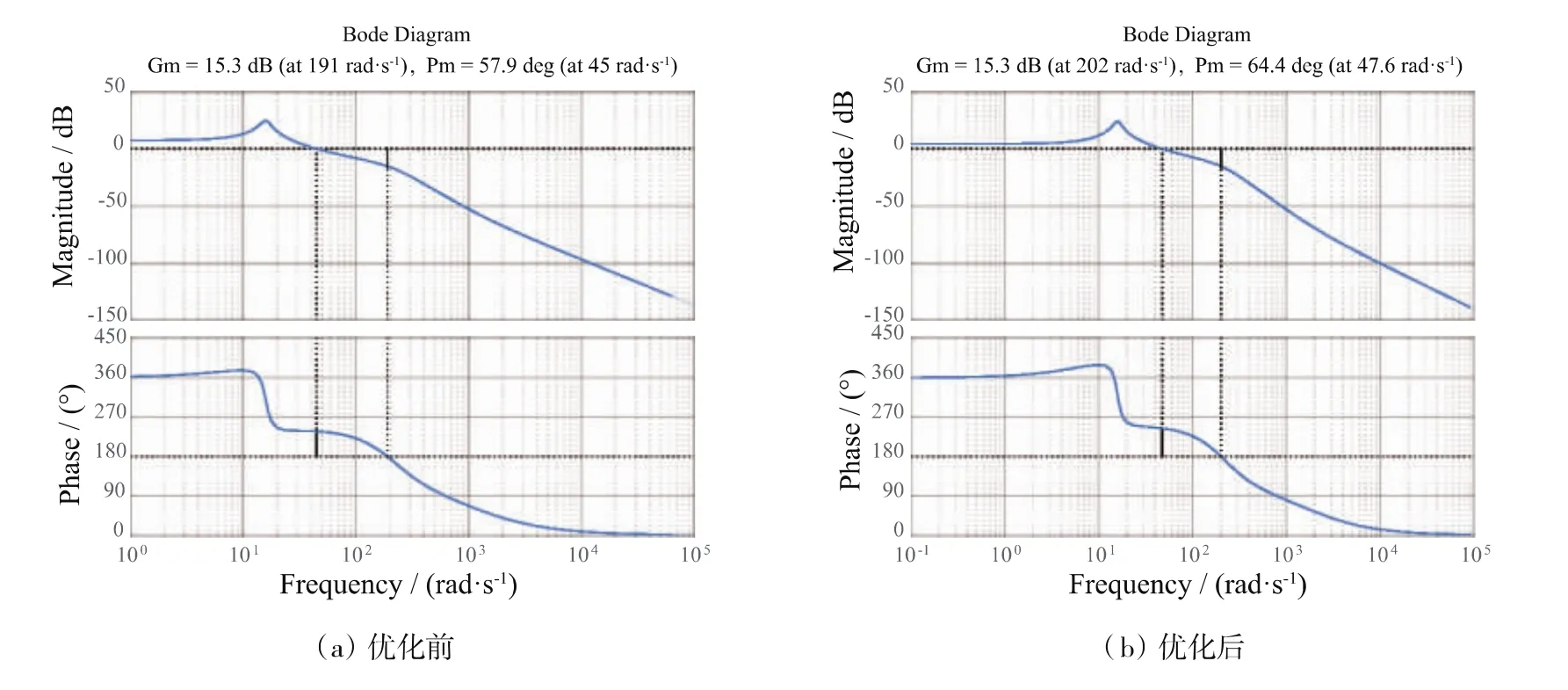
图6 优化前后系统对数频率特性曲线Fig.6 System log frequency characteristic curve before and after optimization
由以上数据及曲线可知,经典两回路过载自动驾驶仪设计参数经过群体数量为100、实际进化代数为5代的遗传算法优化,系统响应的调节时间ts从0.206 0 s降到0.148 0 s,最大超调量σmax从8.09%降到0.90%,系统动态特性优化成果显著。另外,通过系统对数频率特性曲线可知,在优化前,系统幅值裕度为15.3 dB,相角裕度为57.9°,优化后系统幅值裕度为15.3 dB,相角裕度为64.4°。由此可知,在进行参数优化的过程中,系统稳定裕度保持了初值水平,且相角裕度略有提高。
3.2 导弹运动参数摄动影响分析
对自动驾驶仪多目标优化结果进行导弹运动参数摄动分析,由于正交拉偏试验能够用尽量少的仿真试验全面考核系统的性能[12],因此本文采用正交拉偏试验方法。由于飞行过程中主要参数摄动来自于气动力与气动力矩,主要反映在导弹飞行速度及相关动力系数上,因此对该特征点的速度v及动力系数a22、a24、a25进行±10%的拉偏,形成4因素3水平的正交拉偏试验,因素-水平表如表4所示,正交表如表5所示,正交试验结果如图7~15所示。
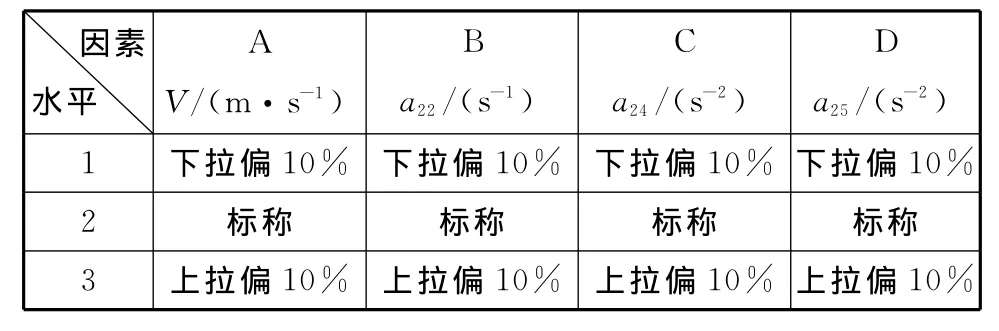
表4 因素-水平表Tab.4 Factor-level table
表5 L9(34)正交试验方案Tab.5 L9(34)Orthogonal test scheme
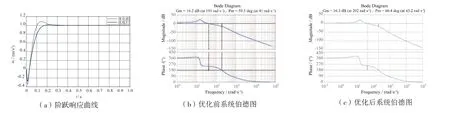
图7 试验号1仿真结果曲线Fig.7 Curves of simulation result of Test 1

图8 试验号2仿真结果曲线Fig.8 Curves of simulation result of Test 2

图9 试验号3仿真结果曲线Fig.9 Curves of simulation result of Test 3
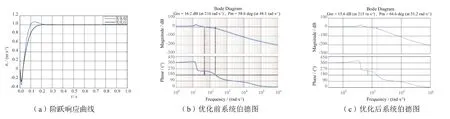
图10 试验号4仿真结果曲线Fig.10 Curves of simulation result of Test 4
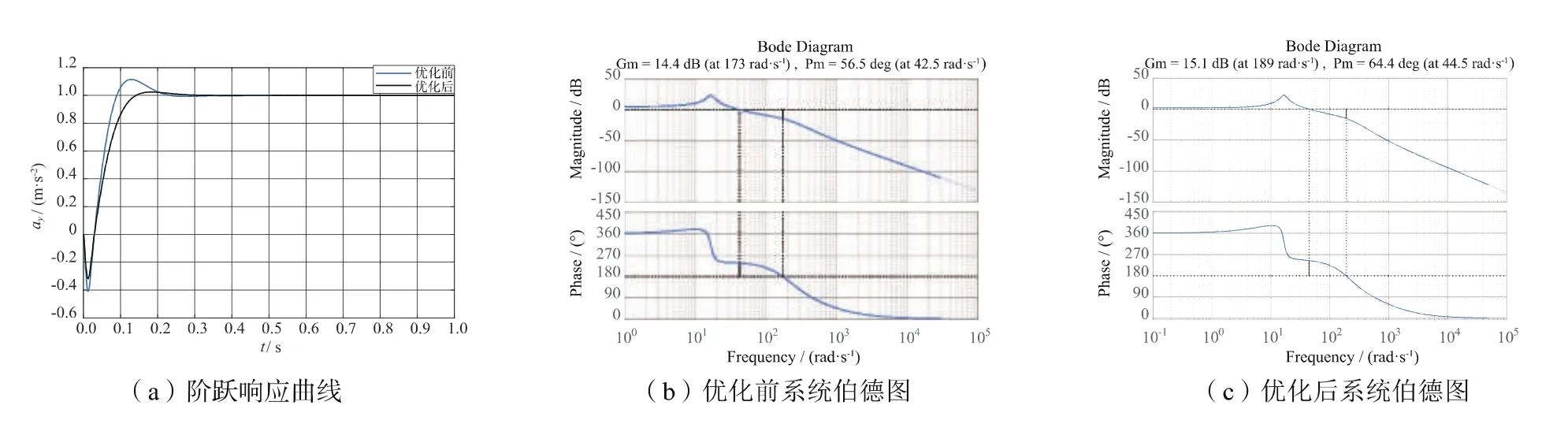
图11 试验号5仿真结果曲线Fig.11 Curves of simulation result of Test 5
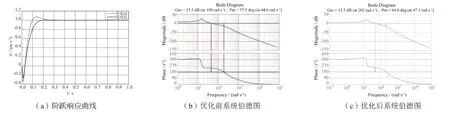
图12 试验号6仿真结果曲线Fig.12 Curves of simulation result of Test 6

图13 试验号7仿真结果曲线Fig.13 Curves of simulation result of Test 7

图14 试验号8仿真结果曲线Fig.14 Curves of simulation result of Test 8

图15 试验号9仿真结果曲线Fig.15 Curves of simulation result of Test 9
本文设计的自动驾驶仪参数多目标优化模型采用了系统的幅值裕度和相角裕度作为优化约束条件,优化后的自动驾驶仪对导弹运动参数摄动具有较好的系统稳定性。由图7~15可知,以标称情况设计得到的自动驾驶仪参数优化结果在导弹运动参数发生摄动时,在保持较好系统稳定裕度的情况下,仍能较好地改善系统动态特性。
4 结束语
本文以经典两回路过载自动驾驶仪为研究对象,将自动驾驶仪设计参数解析解作为初值,以系统幅值裕度、相角裕度作为约束条件,以系统响应的调节时间和最大超调量作为优化目标,建立排除初值干扰的多目标优化目标函数,通过遗传算法对自动驾驶仪设计参数进行优化,并分析导弹运动参数摄动对自动驾驶仪优化结果的影响。仿真结果表明,本文建立的多目标优化模型优化过程收敛,能在保持系统稳定裕度的同时改善自动驾驶仪动态特性,所采用的优化算法能够在约束条件下快速寻优,与需要试凑调整的传统方法相比,较大地提高了寻优效率。该方法对经典两回路过载自动驾驶仪的参数设计具有一定的工程参考价值。
